椎间植入物的制作方法
1.本发明涉及一种椎间植入物,所述椎间植入物:包括至少两个上面的和至少两个下面的接触体,所述接触体具有接触面;包括促动器,所述促动器具有带有延伸轴线的螺纹体,所述螺纹体配设有相继设置的相反的螺纹;包括可轴线运动地安装在螺纹体上的、通过扭转该螺纹体而沿着该螺纹体可移动的楔,这些楔具有楔的至少一个斜坡体的至少接合在所述接触体的至少一部分的对应面上的、以小于90
°
的有限角度朝向彼此延伸的斜坡。
背景技术:
2.us 2019/0269521 a1示出同类型的椎间植入物,其中,所述椎间植入物的各个接触体能够在侧面相互移动分开并且沿竖直方向相互运动分开。所述在侧面的相互移动分开通过具有螺纹杆的促动器经由在螺纹杆的螺纹上配设有斜坡的、可轴向移动的滑动体发生,所述螺纹杆具有相反的螺纹,这些滑动体接合在接触体的相应的对应面上。
3.接触体的竖直的相互移动分开间接地通过设置在各楔与支承体之间的中间体来进行,所述中间体可在下面的支承体的倾斜延伸的槽中移动。
4.这种构造形式由于附加于各楔和支承体而设置为附加的可运动的部件的中间体一方面是耗费的,另一方面是易受干扰的,因为由此可能产生歪斜和卡住。
技术实现要素:
5.本发明的任务因此在于,创造一种椎间植入物,所述椎间植入物在避免上面提到的缺陷的情况下简单地构造并且在能实现支承体沿不同方向在时间上错开的运动的情况下确保可靠的功能。
6.按照本发明,上述任务利用一种同类型的椎间植入物来解决,所述椎间植入物的特征在于,这些楔构成为双楔,所述双楔沿延伸轴线的方向具有两个相继设置的斜坡体,并且其中一个斜坡体的斜坡具有与另一个斜坡体的斜坡不同的定向,并且第一斜坡体的斜坡在侧面直接接合在接触体上,而第二斜坡体的斜坡沿竖直方向直接接合在接触体上。
7.本发明因此规定了两个沿轴向相继设置的斜坡体,在同一个双楔上的不同的斜坡体上的斜坡具有不同的定向,其中,所述第一斜坡体用于使支承体侧向地或者在侧面相互运动分开,第二斜坡体用于使支承体沿竖直或头尾方向相互运动分开。
8.在此特别规定,不同定向的斜坡设置在一个双楔的不同的斜坡体上。
9.本发明的一种特别优选的构造形式规定,所述第一斜坡体的斜坡在竖直方向上以水平的面法线定向,而第二斜坡体的斜坡的面法线以与此不同的定向相对于竖直线围成大约90
°
的有限角度。在此,一种进一步扩展方案规定,所述接触体的与不同定向的斜坡以不同的定向配合作用的对应面沿促动器的螺纹体的轴线的延伸方向相对于不同定向的斜坡体的间距而具有不同的间距,特别是规定,不同定向的斜坡的间距相对于在接触体上的对应面的间距为这样,使得在扭转螺纹体时,接触体至少侧向地相互运动分开并且接着才相对于彼此抬起。
10.在具体的构造形式中这点可以通过如下方式达到,使得斜坡的间距相对于对应面的间距为这样,使得所述接触体首先通过第一斜坡体的斜坡在侧面接合在接触体的对应面上,以便使各接触体侧向地相互运动分开并且在进一步扭转时才使第二斜坡体的斜坡接合在接触体的对应面上,以便使所述接触体抬起。由此具体地实现支承体的时间上错开的运动。
11.按照本发明也可以规定,一个具有两个斜坡件的双楔的不同定向的斜坡的间距小于所属的对应面的间距。
12.本发明的另外的优选的构造形式规定,所述促动器具有与螺纹体固定连接的径向的圆盘或径向的轮,其嵌接到接触体的相对于螺纹体的轴线径向定向的缝隙中,以便与轴线垂直地引导所述接触体,和/或通过至少在上面的接触体中滑动嵌接的引导杆来相对于彼此引导接触体。
13.所述上面的接触体的外部的接触面与下面的接触体的下面的外表面通常不平行于彼此地延伸;而是优选规定,所述上面的接触体的外部的接触面与下面的接触体的外部的接触面围成在5
°
至15
°
之间、优选在9
°
至11
°
之间的角度,以便这样达到对腰脊柱的自然脊柱前凸的更好的配合。在此,每个单个的接触体的接触面的近身体中心的区域首先从关于水平的中心面看以该角度的一半直线上升的面开始,并且然后在远端区域中过渡到相反的曲面中,以便形成拱形,所述拱形也便利于插入到椎间空间内。
14.在优选的构造形式中规定,在一个双楔上的斜坡体与所述双楔一件式地构成。
15.在一种特别优选的构造形式中规定,相叠的和/或并排的接触体通过直线引导部相对于彼此可运动地连接,特别是,至少一个直线引导部是槽榫引导部、优选是燕尾槽引导部。通过该直线引导部,在剪切负载下出现的力通过所述接触体引导并且不使或至少较少地使内部的(功能)结构、如双螺杆的移动机构受负载。
附图说明
16.本发明的其他优点和特征由权利要求书并且由以下的说明得出,在以下的说明中参照附图阐述本发明的优选的实施例。图中:
17.图1示出按照本发明的第一椎间植入物的分解图;
18.图2示出按照本发明的图1的植入物的驱动机构在压缩的状态中的透视图;
19.图2a示出图2的驱动机构的侧视图;
20.图3示出图1的实施形式的驱动机构在扩张的状态中的透视图;
21.图3a示出按照图3的驱动机构的侧视图;
22.图4示出图1的按照本发明的植入物的双楔的透视图;
23.图4a示出图4的双楔的俯视图;
24.图4b示出图4的双楔的侧视图;
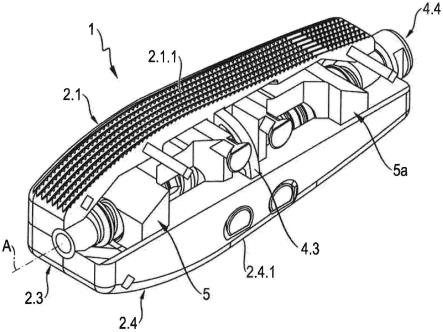
25.图5示出完整的植入物在压缩的状态中的视图;
26.图5a示出植入物在压缩的状态中而去除上面的前面的接触体的视图;
27.图6示出植入物按照第一步骤仅侧向地(在侧面)扩张的状态的视图;
28.图6a示出植入物按照第一步骤按照图6仅侧向地(在侧面)扩张的状态而去除上面的前面的接触体的视图;
29.图7示出按照本发明的植入物在第二展开步骤之后侧向地并且在竖直方向上扩张的状态;
30.图7a示出按照本发明的植入物按照图7在第二展开步骤之后侧向地并且在竖直方向上扩张的状态而去除上面的前面的支承体;
31.图8示出按照本发明的椎间植入物的其他实施形式的分解图;
32.图9示出图8的构造形式的另外的双楔的透视图;
33.图10示出图8的植入物在压缩的状态中的透视图;
34.图10a示出图8、10的植入物在压缩的状态中的侧视图;
35.图11示出图8的植入物在完全扩张的状态中的分解图;
36.图11a示出图8的植入物在完全扩张的状态中的侧视图;以及
37.图12示出按照本发明的具有直线引导部的椎间植入物的改型的实施形式在压缩的状态中;
38.图13示出图12的实施形式在侧面或水平方向扩张的状态中;
39.图14示出按照本发明的图12的椎间植入物在(从接合侧看)左侧的上面的和下面的接触体的区域中的侧视图;
40.图15示出(从接合侧看)左侧的上面的接触体的内侧的透视图;以及
41.图16示出并排的下面的接触体的仰视图。
具体实施方式
42.在图1至图7a中示出按照本发明的椎间植入物的第一实施形式。植入物1具有两个上面的接触体2.1和2.2(2.2在图5a、6a、7a中被去除)并且与其对置地具有两个下面的接触体2.3、2.4。在其间居中地在中央设置有一个促动器或驱动机构3(特别是也参见图3、3a)。
43.接触体2.1-2.4具有朝上方或朝下方定向的接触面,这些接触面在其中间区域、例如2.1.1、2.2.1、2.3.1、2.4.1中基本上水平地定向或者形成或定义一个水平的区域,而所述接触面沿纵向方向在其端部上下降或弯曲,并且在此彼此对置的上面的和下面的接触面朝向彼此延伸。
44.驱动机构3具有中央的螺纹体4,所述螺纹体具有轴线a,所述轴线也确定植入物的纵向方向。螺纹体4具有两个相继设置的、具有相反定向的螺纹4.1、4.2。螺纹4.1是远身体中心的螺纹,螺纹4.2是近身体中心的螺纹。螺纹体4在近身体中心的端部处构成为具有用于接合工具(未示出)的接合轮廓4.4,螺纹体4可以利用所述工具扭转。在螺纹体4上居中地,不可相对扭转地与所述螺纹体连接地设置有一个引导轮4.3,所述引导轮嵌接到接触体2.1-2.4的径向定向的横槽2.5中并且这样相互间确定和规定接触体2.1-2.4和螺纹体4的相对的轴向位置——不取决于接触体2.1-2.4相对于彼此的侧向和竖直的运动。
45.在螺纹体4上支承配设有匹配于螺纹4.1、4.2的内螺纹5.3的、具有两个斜坡件的双楔5、5a。这些双楔镜像对称地构成并且设置为在所述轮的两侧镜像对称地设置。
46.每个双楔5、5a具有第一和第二斜坡体5.1、5a.1、5.2、5a.2,这些斜坡体分别沿轴线a的方向相继设置并且从所述轮4.3开始向外定向。斜坡体5.1的斜坡5.1.1和5.1.2从所述轮4开始向外朝向彼此收窄(zulaufen),更确切地说如下(图2):斜坡体5.1作为上面的和下面的斜坡面分别具有一个斜坡5.1.1和5.1.2,这些斜坡分别具有一个面法线f5,所述面
法线具有相对于关于轴线a的竖直线v的大约90
°
的有限角度(图2、2a)。相同的情况适用于斜坡体的其他斜坡。
47.所述接触体2.1(和同样接触体2.2)针对斜坡5.1.1具有对应面2.6,所述对应面具有与斜坡5.1.1、5.1.2大致或精确相同的斜度,斜坡5.1.1或5.1.2作用于所述对应面,如果在扭转螺纹体4时双楔5和斜坡体5.1和因此斜坡5.1.1、5.1.2从所述轮4.3开始沿着轴线a向外(在附图中向左)运动的话。
48.相同的情况基本上适用于斜坡体5a.1和位于该斜坡体上的斜坡5a.1.1、5a.1.2,其中,在接触体2.1的内侧上构成有相应的对应面2.1.3。在接触体2.2的对应的斜坡方面,相应的内容适用于下面的斜坡5a.1.2和下面的接触体2.3和2.4的相应的对应面。
49.相对于斜坡体5.1沿轴向方向a向内位错地,如上所述,双楔5具有带有斜坡5.2.1和5.2.2的斜坡体5.2,这些斜坡在竖直方向上定向(也参见图3),同样从所述轮4.3向外倾斜于彼此延伸地分别具有面法线f5.2,所述面法线水平地定向、亦即垂直于竖直线v并且与轴线a撑开一个水平的平面(图3)。
50.斜坡5.2.1与在接触体2.4上的同样在竖直方向上定向的、倾斜延伸的对应面2.4.2并且同样与在前面的上面的接触体2.3上的相应的对应面配合作用,并且当所述双楔5通过转动螺纹体4从所述轮4.3向外运动时这样使接触体2.4(也和接触体2.3)向外运动,直至斜坡5.2.1脱离与对应面2.4.2(和接触体2.3的相应的对应面)嵌接,从而接着在使螺纹体4进一步旋拧运动时双楔5可以沿着接触体2.4也和接触体2.3运动。
51.相应的内容适用于斜坡5.2.2和在接触体2.1和2.2上的相应的对应面以及在双楔5a上的斜坡体5a.2的对应的斜坡5a.2.1、5a.2.2(图3、3a),其中,关于斜坡5.2.1和对应面2.4.2的配合作用就此而言参考前面的阐述。
52.在图1-7a的第一构造形式中,斜坡体5.2具有在侧面从所述斜坡体开始并且在斜坡5.2.1上延伸的上面的和下面的突出部分5.2.2.1(图2),则所述下面的突出部分嵌接到接触体2.1的缝隙2.1.4中并且这样使所述接触体在接触体由于斜坡体5.2的接触面而相对于彼此侧向地相互运动分开时水平地引导。相应的内容适用于斜坡体5.2和5a.2的第二突出部分和接触体2.1-2.4的所配置的缝隙2.3.4。
53.所述缝隙2.1.4在其朝向端侧的区域中具有朝向彼此的弯边(abkantung)。由此,当接触体2.1和2.3亦或2.2和2.4如上面描述过的那样在斜坡体5.1、5a.1的作用下沿竖直方向相互运动分开时,保证引导。
54.相应的内容适用于从各附图可看出的、在斜坡体5a.2和配置的缝隙、例如2.3.4a的区域中的突出部分,为此与此相应地以及对于在所述两个提到的斜坡体的对应侧上的相应的突出部分并且对于在接触体2.1和2.2中的相应的缝隙参照前述的说明。
55.最后,例如在接触体2.1和2.2之间还构成有引导杆6.1、6.2,所述引导杆能在所述两个斜坡体2.1、2.2中移动并且在其侧向的相互运动分开和竖直的抬起运动中相对于彼此引导所述两个斜坡体。
56.相应的引导杆设置在下面的接触体2.3和2.4中,所述引导杆在所提到的侧向的运动和下降运动中同样相对于彼此引导所述体。
57.从各附图、特别是图1可以得出,斜坡体5.2和因此其斜坡5.2.1相对于斜坡体5.1或其斜坡5.1.1(及相应的不可见的斜坡)的轴向间距小于在对应面2.4.2与对应面2.6或相
应相同的接触体的相应的对应面之间的轴向间距。相应的内容适合于斜坡体5a.2和5a.1或其斜坡相比于在接触体上的相应的对应面的间距。
58.以此达到,不仅上面的接触体2.1和2.2而且下面的接触体2.3和2.4首先在第一步骤中通过斜坡体5.2和5a.2或其斜坡侧向地在侧面相互移动分开,并且接着才、亦即时间上错开于上述步骤地,接触体2.1和2.3以及接触体2.2和2.4通过斜坡体5.1和5a.1或斜坡沿垂直或竖直方向相互运动分开并且因此在侧向地加宽的状态中接触体2.1-2.4才朝向上面的和下面的椎体移动,由此减少所述椎体损害的危险。
59.按照本发明的椎间植入物的实施形式在图8至11a中示出。所述实施形式基本上并且很大程度上具有与图1至7a的第一实施形式相同的构造形式。就这点而言,相同的部件配设有相同的附图标记并且对于说明参照第一实施形式的上述说明。斜坡体5.2、5.2a的稍微不同的构造形式中的主要差异是双楔5、5a。所述差异在于,代替图1至7a的构造形式中的相应的斜坡体的两侧的突出部分,而在每个侧面上示出斜坡体5a.2的斜坡体5.2和5a.2.6的一个在侧面的突出部分5.2.5和5.2.6(在斜坡体5a.2上在另一侧上存在的突出部分在附图中无法看到)。突出部分5.2.5、5.2.6和5a.2.6设置在斜坡体5.2或5a.2的中间高度上。这些凸出部分嵌接到首先水平地、然后倾斜延伸的缝隙2.1.5、2.1.6、2.2.5、2.2.6、2.3.5、2.3.6、2.4.5、2.4.6中,其中,上面的接触体2.1、2.2的缝隙2.1.5、2.1.6、2.2.5、2.2.6的外部的倾斜的区段向外向下延伸,而下面的接触体2.3、2.4的缝隙2.3.5、2.3.6、2.4.5、2.4.6的外部的倾斜的区段向外向上延伸。
60.这引起,当突出部分5.2.5和5.2.6(以及斜坡体5a的相应的突出部分)进入到所提到的缝隙的倾斜区段中时,下面的接触体2.3和2.4朝下方并且上面的接触体2.1和2.2朝上方被挤压并且因此引起在竖直方向上的张开。接触体2.1和2.2相对于彼此和接触体2.3以及2.4相对于彼此的前述的水平的张开以与参照第一构造形式所描述的相同的方式进行。
61.为了突出部分5.2.5和5.2.6也及5a.2.6(和斜坡体5a.2的相应的对置的突出部分)同时分别可以嵌接到下面的接触体和上面的接触体的缝隙中,以便促使相应的竖直方向张开,亦即,例如突出部分5.2.5不仅可以嵌接到接触体2.3的缝隙2.3.5而且可以嵌接到接触体2.1的缝隙2.1.5中,缝隙必须在压缩的基础配置(图10、10a)中重叠。相应地,具有缝隙2.1.5、2.1.6或2.2.5、2.2.6的水平的区域2.1.7、2.2.7沿竖直方向在内部嵌接在相应的下面的接触体2.3或2.4的侧壁的内部,由此使缝隙的重叠发生在其水平的区域中,如在假想地一方面将图8中的接触体2.1和2.3而另一方面将接触体2.2和2.4拼合时而容易看出的那样。
62.图12至16示出在前的附图的椎间植入物的另一种改型。相同的部件配合标记有相同的附图标记。图12至16的椎间植入物同样具有上面的接触体2.1、2.2和下面的接触体2.3、2.4。在图12中示出椎间植入物1在压缩的状态中,在图13中示出其在(仅)在侧面或水平扩张的状态中。
63.植入物1首先具有所述两个上面的接触体2.1、2.2的直线引导部7.1、7.2(图12、13)。此外,所述植入物具有所述两个下面的接触体2.3、2.4的直线引导部7.3、7.4(图12、13、14、16)。直线引导部7.1-7.4用于在侧面或水平地分别相互引导上面的接触体2.1、2.2或下面的接触体2.3、2.4。此外,设有直接相叠的接触体2.1和2.3或2.2和2.4的相应的(竖直的)直线引导部,其中,在各附图中,更准确地说在图13中示出接触体2.2、2.4的仅一个竖
直的直线引导部7.5,在下面进一步阐述所述竖直的直线引导部。
64.每个直线引导部7.1-7.2包括一个榫槽引导部、特别是具有侧凹的燕尾槽引导部,如这点特别是在图12、13、16中的引导部7.3、图13也及图15的引导部7.1和7.2示出和可看出的那样。相应的内容也适用于图13的引导部7.5。
65.每个直线引导部与此相应地具有一个槽和一个嵌接到所述槽中的、通常被称为“榫”的凸起或突出部分。在直线引导部7.1中,这是槽7.1.1和榫7.1.2,在直线引导部7.2中是槽7.2.1和榫或凸起7.2.2(分别特别是图13)。在直线引导部7.3中,这是槽7.3.1和榫7.3.2,而在直线引导部7.4中是槽7.4.1和榫7.4.2(相应图16)。
66.在图13中示出的(竖直的)直线引导部7.5中,所述槽形成在所述两个朝下方引导的引导凸起7.5.1和7.5.1a,而引导部7.5的相应的榫或凸起通过(从接合侧起)右侧的下面的支承体的侧壁7.5.2形成。在此,凸起或榫7.5.2和引导凸起7.5.1、7.5.1a的相互配合作用的侧壁同样构成为具有侧凹的燕尾形的,如这在图13中所示的那样。
67.相叠的支承体2.1、2.3的竖直的直线引导部以与直线引导部7.5相同的方式构成。
68.通过直线引导部实现,出现的横向力通过所述直线引导部承接,并且特别是双螺杆4和楔体的与该双螺杆配合作用的螺纹免除或至少减轻这样的力。
69.按照本发明的椎体间植入物1在所有实施形式中基本上按如下方式引入和放置:
70.首先,开设至椎体间开口的入口,如这例如在wo 2014/146797中描述的那样。
71.通过入口套筒,接着导入在其按照图5的构造形式的压缩的状态中的椎间植入物1。为此,于是实现图6、6a的中间配置。如果椎间植入物1已达到其在两个椎骨(即一个位于其下方的椎骨和一个位于其上方的椎骨)之间的位置,穿过导入套筒借助于工具来接合在椎间植入物1的近身体中心的端部处的操纵件上并且通过所述工具扭转螺纹体4。因为所述两个双楔5、5a不会一同扭转,则所述双楔通过在所述双楔与螺纹体的相反的外螺纹之间的螺纹连接从初始位置沿相反的方向相互分开地前进,如这在从图2至图3的过渡中可看出的那样。
72.在此,首先斜坡体5.2和5a.2接合在接触体2.1-2.4的相应的对应面上并且使所述接触体侧向地相互移动分开,直至接触体的对应面(例如2.4.2)释放相应的斜坡,从而所述接触体在进一步扭转螺纹体4时可以沿着支承体运动。同时、也就是在支承体完全侧向移动分开之后,斜坡体5.1以其斜坡接合在接触体的相应的对应面、如2.6上,从而在进一步扭转螺纹体时,所述接触体通过所述两个提到的面抬起,直至达到图7、7a的配置。
73.在该最后的方法步骤中,接触体以其外部的侧面朝向椎体移动并且因此各部件的至少一个张力达到椎体与椎间植入物。
74.通过接触体首先在侧向张开的状态中朝向椎体移动,明显减少或排除所述椎体损害的危险。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1