校准器械接口的制作方法
本发明涉及校准手术机器人系统中的器械的器械接口。该校准使用指示器械的关节的使用的使用数据。
背景技术:
1、使用机器人来辅助和执行手术是已知的。图1示出了典型的手术机器人100,该手术机器人由基座108、臂102和器械105构成。基座支撑机器人,并且本身刚性地附接到例如手术室地面、手术室天花板或推车。臂在基座与器械之间延伸。臂借助于沿其长度的多个柔性关节103而铰接,所述多个柔性关节用于将手术器械相对于患者定位在期望位置。手术器械附接到机器人臂的远端104。手术器械在端口107处穿过患者101的身体,以便进入手术部位。该器械在其远端包括用于执行医疗程序的末端执行器106。
2、图2示出了用于执行机器人腹腔镜手术的典型手术器械200。手术器械包括器械接口201,手术器械借助于该器械接口连接到机器人臂。轴202在接口201与铰接部203之间延伸。铰接部203端接于末端执行器204。在图2中,一对锯齿状钳夹被示出为末端执行器204。铰接部203允许末端执行器204相对于轴202移动。期望通过铰接部向末端执行器204的运动提供至少两个自由度。器械接口被构造成联接到器械可接合的机器人臂的臂驱动组件。当器械与臂接合时,器械接口与驱动组件接合,从而将驱动力传递到器械。
3、图3示出了具有从基座301延伸的臂300的外科机器人。该臂包括多个刚性肢体302。肢体通过转动关节303联接。最近侧的肢体302a通过近侧关节303a联接到基座。它和其他肢体通过另外的关节303串联联接。适当地,腕部304由四个单独的转动关节组成。腕部304将臂的一个肢体(302b)联接到最远侧肢体(302c)。最远侧肢体302c承载手术器械306的附接件305。臂的每个关节303具有一个或多个电机307,所述电机可以被操作以在相应的关节处引起旋转运动,以及一个或多个方位和/或扭矩传感器308,所述方位和/或扭矩传感器提供关于该关节处的当前配置和/负荷的信息。适当地,电机被布置在它们驱动其运动的关节的近侧,以便改善重量分布。为了清楚起见,在图3中仅示出了一些电机和传感器。臂通常可以如专利申请pct/gb2014/053523(wo 2015/132549)中所述。
4、臂端接于附接件305以与器械306相接。适当地,器械306采取关于图2描述的形式。器械的直径小于8mm。适当地,器械的直径为5mm。器械可以具有小于5mm的直径。器械直径可以是轴的直径。器械直径可以是铰接部的轮廓的直径。适当地,铰接部的轮廓的直径与轴的直径匹配或比轴的直径窄。附接件305包括用于驱动器械的铰接部的驱动组件。驱动组件的可移动接口元件机械地接合器械接口的相应的可移动接口元件,以便将驱动力从机器人臂传递到器械。在典型手术期间,一种器械会数次更换为另一种器械。因此,在手术期间,器械可附接到机器人臂且可从机器人臂拆卸。驱动组件接口和器械接口的特征有助于它们在彼此接合时的对准,从而降低它们需要由用户对准的准确性。
5、器械306包括用于执行手术的末端执行器。末端执行器可以采用任何合适的形式。例如,末端执行器可以是平滑的钳夹、锯齿状钳夹、夹持器、一对剪切钳、用于缝合的针、相机、激光器、刀、吻合器、烧灼器、抽吸器。如关于图2所述,所述器械包括器械轴与末端执行器之间的铰接部。铰接部包括允许末端执行器相对于器械的轴移动的若干关节。铰接部中的关节由例如线缆的驱动元件致动。这些驱动元件在器械轴的另一端固定到器械接口的接口元件。因此,机器人臂按如下方式将驱动力传递到末端执行器:驱动组件接口元件的移动使器械接口元件移动,所述器械接口元件的移动使驱动元件移动,所述驱动元件的移动使铰接部的关节移动,所述关节的移动使末端执行器移动。
6、用于电机、扭矩传感器和编码器的控制器分布在机器人臂内。控制器经由通信总线连接到控制单元309。控制单元309包括处理器310和存储器311。存储器311以非暂态方式存储软件,软件可由处理器执行,以控制电机307的操作以使臂300以本文所述的方式操作。具体而言,软件可以控制处理器310以使电机(例如经由分布式控制器)根据来自传感器308的输入以及来自外科医生命令接口312的输入进行驱动。控制单元309联接到电机307,以根据由软件的执行所产生的输出来驱动它们。控制单元309联接到传感器308以接收来自传感器的感测输入,并且联接到命令接口312以从其接收输入。例如,相应的联接可以各自是电缆或光缆,和/或可以通过无线连接来提供。命令接口312包括一个或多个输入装置,由此用户可以期望的方式请求末端执行器的运动。输入装置例如可以是可手动操作的机械输入装置,诸如控制手柄或操纵杆,或非接触式输入装置,诸如光学手势传感器。存储在存储器311中的软件被配置为根据预定的控制策略对这些输入作出响应,并且使臂的关节和器械相应地移动。控制策略可以包括安全特征,其响应于命令输入而调节臂和器械的运动。因此,总的来说,命令接口312处的外科医生可以控制器械306移动以执行期望的手术程序。控制单元309和/或命令接口312可以远离臂300。
7、所图示的外科机器人包括单个机器人臂。其它外科机器人系统可以包括多个外科机器人和/或多个机器人臂。例如,其它示例外科机器人系统可以包括具有多个机器人臂的外科机器人,所述多个机器人臂各自可以接收和操纵外科器械,或者它们可以包括多个外科机器人,所述多个外科机器人各自具有可以接收和操纵外科器械的机器人臂。
8、臂102端接于附接件以与器械相接,所述附接件的实例可在图4中看到。附接件包括用于驱动器械105的铰接部的驱动组件。驱动组件接口400与器械接口相接,所述器械接口的实例在图5中500处示出。驱动组件的可移动接口元件401、402、403接合器械接口的相应的可移动接口元件502,以便将驱动力从机器人臂102传递到器械105。在图4和图5所示的实例中,驱动组件接口元件包括突出翅片401、402、403,并且器械接口的接口元件包括用于接收翅片的杯部502。翅片和杯部都可以无论哪种方式以圆形提供。在一些实施方式中,驱动组件接口元件包括杯部,并且器械接口的接口元件包括可收纳在杯部中的翅片。可以提供相应的驱动组件接口元件和相应的器械接口元件彼此接合的其它方式。驱动组件接口元件的线性运动引起器械接口的接口元件的对应线性运动。
9、图6是典型器械的器械接口的驱动机构的示意图。在图6所示的驱动机构中,驱动组件接口元件602包括杯部,且器械接口元件604包括可收纳在杯部602中的翅片。(机器人臂的)驱动组件接口元件602与器械的器械接口元件604接合。在图6中,驱动元件606在一端固定到器械接口元件604,并且在另一端经由关节610固定到末端执行器608。关节形成铰接部203的一部分。驱动组件接口元件602与器械接口元件604接合,使得驱动组件接口元件的运动传递到器械接口元件,从而产生器械接口元件的对应运动。器械接口元件固定到驱动元件,使得器械接口元件604的运动被转换成驱动元件606的运动。由于驱动元件也固定到末端执行器608,所以器械接口元件的运动被直接转换成末端执行器的运动。因此,驱动组件接口元件的运动产生末端执行器的运动。机器人臂102按如下方式将驱动力传递到器械105的末端执行器608:驱动组件接口元件602的移动使器械接口元件604移动,所述器械接口元件的移动使驱动元件606移动,所述驱动元件的移动使铰接部203的关节610移动,所述关节的移动使末端执行器608移动。在此实例中,驱动组件接口元件的移动根据一组固定参数(驱动元件的长度、关节的摩擦等)而转换成末端执行器的移动。以此方式,驱动组件接口元件的位置与末端执行器之间的关系是固定的。
技术实现思路
1、提供此
技术实现要素:
以介绍下文在具体实施方式中进一步描述的构思的选择。本发明内容不旨在标识所要求保护的主题的关键特征或必要特征,也不旨在用于限制所要求保护的主题的范围。
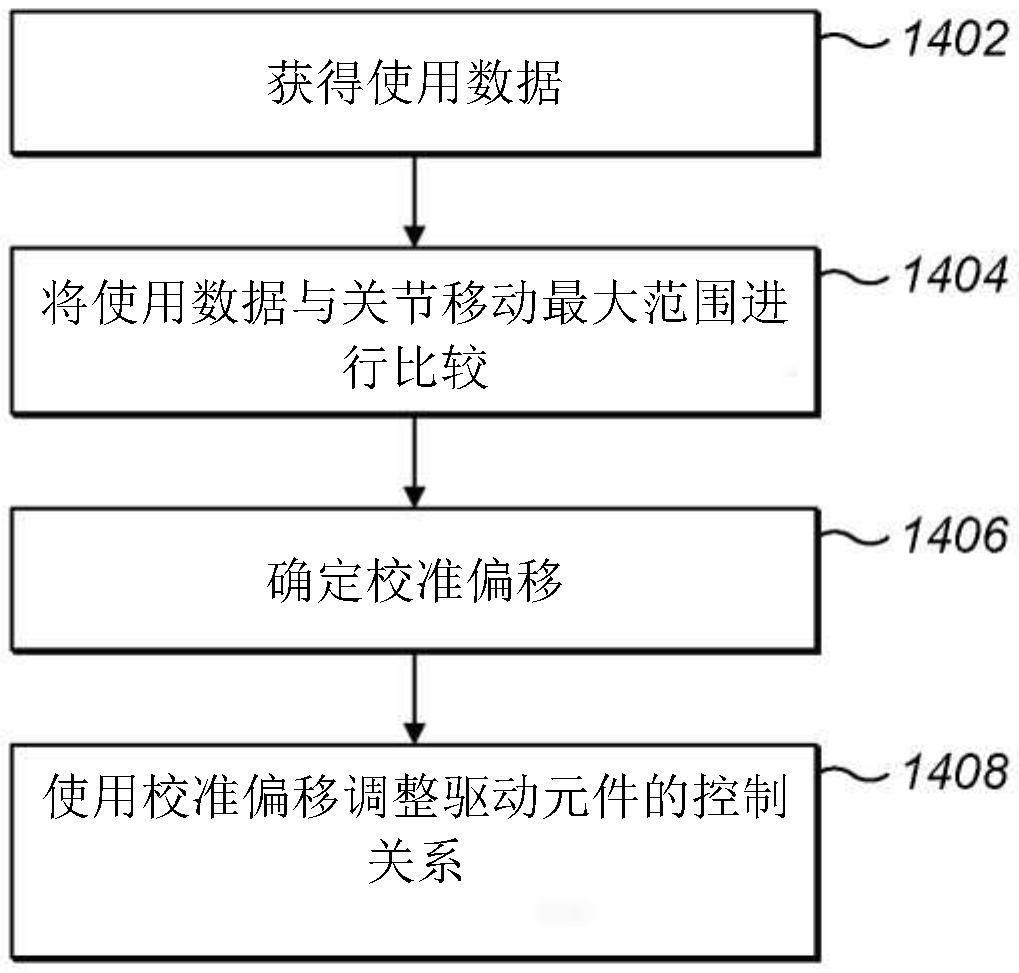
2、根据本发明的一个方面,提供了一种校准手术机器人系统中的器械的器械接口的方法,所述手术机器人系统包括机器人,所述机器人具有基座和臂,所述臂从所述基座延伸到驱动组件,所述驱动组件用于与所述器械接口接合以将驱动力传递到所述器械,所述器械接口被构造成经由驱动元件驱动所述器械的关节,所述方法包括:获得指示所述器械的关节的使用的使用数据;将所述使用数据与所述关节的关节移动最大范围和所述关节的预期关节移动模型中的一者或两者进行比较;通过所述比较确定校准偏移以调整被布置成驱动所述关节的驱动元件的控制关系;以及使用所述校准偏移来调整所述驱动元件的控制关系,以便校准所述器械接口。
3、确定所述校准偏移可包括根据所述比较确定偏差值,所述偏差值指示关节使用偏离预期关节使用的偏差;以及根据所述偏差值确定所述校准偏移。所述驱动元件的控制关系可包括所述驱动元件的定位,并且调整所述控制关系可包括使用所述校准偏移来调整所述驱动元件的定位。
4、所述驱动元件的控制关系可包括被布置成驱动所述驱动元件的齿轮装置的构造,并且调整所述控制关系可包括使用所述校准偏移来调整所述齿轮装置的构造。调整所述控制关系可包括从第一齿轮比改变为第二齿轮比,移动所述驱动元件,以及从所述第二齿轮比改变回到所述第一齿轮比。
5、所述驱动元件的控制关系可包括所述驱动元件的张力,并且调整所述控制关系可包括使用所述校准偏移来调整所述驱动元件的张力。
6、所述方法可包括从存储器和/或从所述器械获得所述使用数据。所述使用数据可包括所述器械的关节的关节角度数据。所述使用数据可包括被配置成驱动所述器械的关节的器械驱动器的器械驱动器位置数据。可以基于以下各项中的一者或多者获得所述使用数据:器械类型、待使用所述器械执行的程序、待使用所述器械执行的程序中的阶段、待使用所述器械执行的程序内的动作、所述器械附接的手术机器人系统的id,以及外科医生id。
7、将所述使用数据与所述关节的关节移动最大范围进行比较可包括使用器械驱动器位置和/或关节角度位置的概率密度、机器学习算法、统计分析技术和拟合优度技术中的至少一者。
8、确定所述校准偏移可包括根据所述使用数据与器械驱动器位置和/或所述关节的关节移动的相应最大范围的比较来识别特征器械驱动器位置和/或关节角度,并且所述方法可包括根据所述特征器械驱动器位置和/或关节角度确定所述校准偏移。确定所述校准偏移可包括计算所述特征器械驱动器位置和/或关节角度与器械驱动器位置和/或所述关节的关节移动的最大范围的中点之间的差。
9、调整所述驱动元件的定位可包括:使器械接口元件与所述驱动元件分离,修改所述驱动元件相对于所述器械接口元件的位置,以及将所述接口元件重新联接到所述驱动元件。
10、所述方法可包括使用经校准的器械接口驱动所述关节。
11、根据本发明的另一方面,提供了一种用于校准手术机器人系统中的器械的器械接口的器械接口校准器,所述手术机器人系统包括机器人,所述机器人具有基座和臂,所述臂从所述基座延伸到驱动组件,所述驱动组件用于与所述器械接口接合以将驱动力传递到所述器械,所述器械接口被构造成经由驱动元件驱动所述器械的关节,所述校准器被配置成:获得指示所述器械的关节的使用的使用数据;将所述使用数据与所述关节的关节移动最大范围和所述关节的预期关节移动模型中的一者或多者进行比较;根据所述比较确定校准偏移以调整被布置成驱动所述关节的驱动元件的控制关系;以及通过调整所述关节的驱动元件的控制关系来输出所述校准偏移以用于校准所述器械接口。
12、所述校准器可被配置成:通过根据所述比较确定偏差值来确定所述校准偏移,所述偏差值指示关节使用偏离预期关节使用的偏差;并且根据所述偏差值确定所述校准偏移。所述驱动元件的控制关系可包括所述驱动元件的定位,并且调整所述控制关系可包括使用所述校准偏移来调整所述驱动元件的定位。所述驱动元件的控制关系可包括以下各项中的一者或多者:被布置成驱动所述驱动元件的齿轮装置的构造,并且调整所述控制关系包括使用所述校准偏移来调整所述齿轮装置的构造;所述驱动元件的张力,并且调整所述控制关系包括使用所述校准偏移来调整所述驱动元件的张力。
13、所述校准器可被配置成从存储器和/或从所述器械获得所述使用数据。所述使用数据可包括器械驱动器位置数据和/或所述器械的关节的关节角度数据。所述校准器可被配置成基于以下各项中的一者或多者获得所述使用数据:器械类型、待使用所述器械执行的程序、待使用所述器械执行的程序中的阶段、待使用所述器械执行的程序内的动作、所述器械附接的手术机器人系统的id,以及外科医生id。
14、所述校准器可被配置成通过使用器械驱动器位置和/或关节角度位置的概率密度、机器学习算法、统计分析技术和拟合优度技术中的至少一者来将所述使用数据与所述关节的关节移动最大范围进行比较。
15、所述校准器可被配置成通过根据所述使用数据与器械驱动器位置和/或所述关节的关节移动的最大范围的比较以识别特征器械驱动器位置和/或关节角度,来确定所述校准偏移,并且所述校准器可被配置成根据所述特征器械驱动器位置和/或关节角度确定所述校准偏移。所述校准器可被配置成通过计算所述特征器械驱动器位置和/或关节角度与器械驱动器位置和/或所述关节的关节移动的最大范围的中点之间的差来确定所述校准偏移。
16、本文所述的任何方面的任何特征可与本文所述的任何方面的任何其他特征组合。任何装置特征都可以被重写为方法特征,反之亦然。仅仅为了简洁起见,这些没有被完全地写出。
- 还没有人留言评论。精彩留言会获得点赞!