一种控制舵盘机构及医疗推车的制作方法
本申请涉及医疗器械,具体而言涉及一种控制舵盘机构及医疗推车。
背景技术:
1、外科手术机器人系统具有减小创口,提高手术成功率等显著优点,广泛应用于各类腹腔手术、前列腺手术、妇科手术等。外科医生可以远离手术台操纵机器进行手术,在具有更大视野的同时,可以让手术的施展更加灵活,通过系统消除人为抖动,使手术更加稳定。对外科手术机器人系统的研究也在近年来成为医疗器械应用的新领域。
2、外科手术机器人系统主要由患旁机器人、医生操纵台、视觉推车等三部分组成。外科手术中,作为手术直接执行机构的患旁机器人,一般具有较大的质量和体积,在进行手术的前后,需要通过人工操作控制舵盘,来驱动患旁机器人,完成移动和定位等功能。
3、以常见的舵盘为例,其舵盘的操控方式类似于汽车方向盘,操控舵盘以舵盘立柱为旋转中心进行旋转,通过一系列传动装置使推车的前轮发生转向,以此控制推车的转向运动。通过握住把手进行旋转来控制油门的大小,旋转方向的不同则对应前进或后退的驱动力。推车的转向轮一般为前轮,舵盘布置在推车的最后方,进行操作时,人也是处于推车的最后方,同时进行操作舵盘的转向和拧紧油门较为不便,尤其使使推车后退的操作,需要对操作人进行一定的培训才能满足操作要求。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、为解决以上技术问题,本申请设计了一种控制舵盘机构,是采用如下方案实现的:
3、一种控制舵盘机构,包括:
4、舵盘基座;
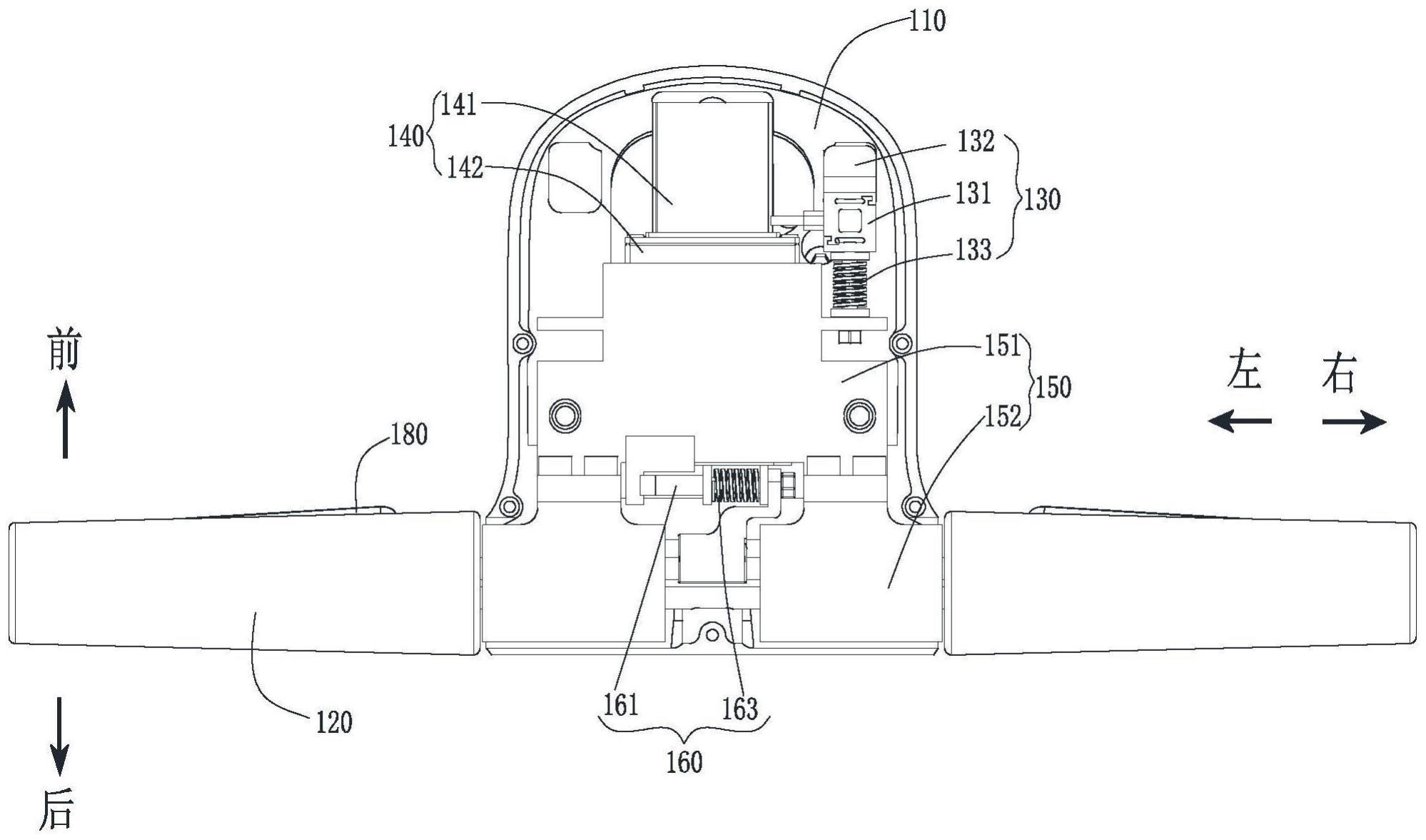
5、第一拉压力传感器,所述第一拉压力传感器固定安装于所述舵盘基座上,所述第一传感器感应的拉压力方向为第一方向;
6、转接部,与所述第一拉压力传感器直接或间接的弹性连接,并在所述舵盘基座上沿第一方向移动;
7、把手部,所述把手部可随第一活动部沿第一方向移动,所述把手部还相对于所述第一活动部可沿第二方向移动,所述第二方向在水平面内的投影与所述第一方向在水平面内的投影垂直;
8、第二拉压力传感器,所述第二拉压力传感器与所述第一活动部相对固定设置,所述把手部与所述第二拉压力传感器直接或间接的弹性连接,所述第二拉压力传感器检测所述把手部在第二方向上的拉压力。
9、本申请采用通过布置在舵盘上的两组拉压力传感器,获取操作者对舵盘的操作意向,通过对力的分解,将力的方向大小分别由两组拉压力传感器进行收集,在操作时直接感受人的行进动作,进而驱动轮进行运动,即可直观有效地对患旁机器人进行灵活的移动。同时,第一拉压力传感器与第一活动部弹性连接,第二拉压力传感器与第二活动部弹性连接,避免当施加在舵盘上的力过大时使传感器超限造成损坏,大大提高了舵盘使用的可靠性和寿命。
技术特征:
1.一种控制舵盘机构,其特征在于,包括:
2.根据权利要求1所述的控制舵盘机构,其特征在于,还包括第一固定件和第一活动件,所述第一固定件固定设置在所述舵盘基座上,所述第一活动件在所述第一固定件上沿第一方向上直线移动,所述转接部与所述第一活动件固定连接。
3.根据权利要求2所述的控制舵盘机构,其特征在于,所述第一固定件设置为滑轨,所述第一活动件为滑块。
4.根据权利要求1或2或3所述的控制舵盘机构,其特征在于,所述转接部与所述第一拉压力传感器之间连接有弹性件。
5.根据权利要求4所述的控制舵盘机构,其特征在于,还包括有止挡部,所述限位部设置于所述舵盘底座或所述转接部,所述限位部限位所述转接部在第一方向的移动。
6.根据权利要求1所述的控制舵盘机构,其特征在于,还包括第二固定件和第二活动件,所述第二固定件与所述转接部相对固定设置,所述第二活动件与所述把手部相对固定设置,所述第二活动件在所述第二固定件上沿第二方向上直线移动。
7.根据权利要求6所述的控制舵盘机构,其特征在于所述第二固定件设置为滚珠花键轴,所述第二活动件设置为滚珠花键套筒,所述滚珠花键套筒套设在所述滚珠花键轴上移动。
8.根据权利要求6或7所述的控制舵盘机构,其特征在于,所述第二活动件与所述第二拉压力传感器之间连接有弹性件。
9.根据权利要求6或7所述的控制舵盘机构,其特征在于,所述转接部包括第一连接件和第二连接件,所述第一连接件与所述第一拉压力传感器连接,所述第二连接件与所述第一连接件固定连接,所述第二固定件固定安装于所述第二连接件上。
10.根据权利要求9所述的控制舵盘机构,其特征在于,所述第二连接件具有止挡部,所述止挡部可与所述把手部抵接,所述止挡部限位所述把手部在第二方向的移动。
11.根据权利要求1所述的控制舵盘机构,其特征在于,所述第一拉压力传感器设置有至少一个,至少一个所述第一拉压力传感器的感应力的方向均为第一方向;和/或
12.根据权利要求1所述的控制舵盘机构,其特征在于,所述把手部上设置有一组或两组微动开关。
13.一种医疗推车,包括权利要求1~12任一所述的控制舵盘机构。
技术总结
本申请公开了一种控制舵盘机构,包括第一拉压力传感器,固定安装于舵盘基座上;转接部,与第一拉压力传感器直接或间接的弹性连接;把手部,把手部可随第一活动部沿第一方向移动,把手部还相对于第一活动部可沿第二方向移动,第二方向在水平面内的投影与第一方向在水平面内的投影垂直;第二拉压力传感器,与第一活动部相对固定设置,把手部与第二拉压力传感器直接或间接的弹性连接。该方案中采用两组拉压力传感器,获取操作者对舵盘的操作意向,通过对力的分解,将力的方向大小分别由两组拉压力传感器进行收集,在操作时直接感受人的行进动作,进而驱动轮运动。而且两组拉压力传感器均连接有弹性器件,提高了舵盘使用的寿命。
技术研发人员:请求不公布姓名
受保护的技术使用者:深圳康诺思腾科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!