一种身高测量方法及装置与流程
1.本发明涉及及医疗健康检测领域,特别涉及一种非接触式的身高测量方法及装置。
背景技术:
2.身高是人体的重要特征参数,在医院体检的身高测量、安防、基础交通验票、人体建模等领域有着重大的应用价值。传统的身高测量方式,需要待测人体到体检现场站立在固定位置通过标尺测量身高,这种身高测量方式虽然精确度较高,但是效率较低,需要测量人员进行现场的操作,也不能就进行批量的身高测量。
3.随着科技的发展,出现了不少新的测量方法,包括利用超声波探测仪对人体身高进行测量,还有利用测距仪以及光学成像原理获取人体身高等。上述方法相对于传统测量方法虽然有所改进,但都需要特殊的硬件,包括超声波探测仪,红外测距仪,深度传感器等予以支持,成本较高,难以推广。在人群密集的情况下,以上述方法对身高进行测量,速度慢、效率低,无法满足需求。
4.随着社会经济的快速发展,国民生活方式的变化,尤其是近年来疫情爆发的原因,越来越多的人不愿意去医院进行体检,因此远程基于视频的体检方式具有非常重要的研究意义。因此,基于视频图像的身高测量方法被广泛使用,使用上述方法可以同时对出现在相机视野范围内的多个人体目标进行身高的测量,其测量速度快、效率高。该项目中作为体检中的一项重要参数,不需要专门的硬件,无需与仪器接触,无需待测人体保持固定姿势长时间等待,实时性强。
5.公开号为cn101363722a,公开日为2009.02.11的中国发明专利公开了一种身高测量方法及其测量装置,通过测量人体位置,判断人体位置是否进入预定范围,采集人体视频图像,检测最佳人脸图像,由最佳人脸图像确定人体身高,这种方法比较简单,是根据人脸和身高的大体比例,对身高进行的估算,这种只适应于摄像头安装角度固定,人在视野中范围固定的情况。
6.目前,根据图像中人体的头脚坐标计算实际场景中人体身高的方法很多,也比较成熟。例如公开号为cn105286871a,公开日为2016.02.03的中国发明专利公开了一种基于视频处理的人体身高测量方法,通过人体检测、前景人体分割、提取人体特征点、在相机视野范围内设置含有三条水平参考线的参照面,根据运动投影中比例关系不变原理和三角形相似原理检测人体身高。这种方法只需要人出现在摄像机视野中就可以了,不需要提前知道人与摄像头之间的距离。但是需要在安装摄像头的时候用三条参考线去做一次标定,并且发明专利中写的方法在三条水平参考线成像后,水平参考在成像图像中的纵坐标并不一定只有一个值。即使三条水平参考线成像后的只有1个值,但是由于摄像机拍摄角度的原因三条水平线成像后,并不一定仍然是水平的,通过计算水平线的纵坐标的距离精度不高。其中也没有写明什么时候开始做人体检测,当人体行走的情况下,检测得到的人体身高肯定是精度不高的。这种方法更适用于安防领域中的身高估算。
技术实现要素:
7.为了解决上述问题,本发明提供一种测量精度高而且可以远程测量的身高测量方法及装置。
8.为了实现上述目的,本发明一方面提供一种身高测量方法,包括:
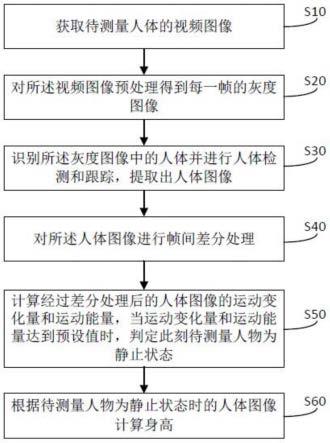
9.获取待测量人体的视频图像;
10.对所述视频图像预处理得到每一帧的灰度图像;
11.识别所述灰度图像中的人体并进行人体检测和跟踪,提取出人体图像;
12.对所述人体图像进行帧间差分处理;
13.计算经过差分处理后的人体图像的运动变化量和运动能量,当运动变化量和运动能量达到预设值时,判定此刻待测量人物为静止状态;
14.根据待测量人物为静止状态时的人体图像计算身高。
15.优选的,识别所述灰度图像中的人体并进行人体检测和跟踪,提取出人体图像,进一步包括:
16.对当前帧和上一帧之间的人体进行跟踪匹配,当人体跟踪上后,根据当前帧和上一帧图像中人体的位置的最小外接矩形确定人体检测框;
17.根据所述人体检测框提取出每一帧的人体图像。
18.优选的,对所述人体图像进行帧间差分处理,进一步包括:
19.将人体图像进行高斯模糊,得到高斯平滑后的人体图像;
20.将高斯平滑后的人体图像做帧间差分处理;
21.对帧间差分处理后的人体图像做滤波函数去噪。
22.优选的,计算经过差分处理后的人体图像的运动变化量和运动能量,当运动变化量和运动能量达到预设值时,判定此刻待测量人物为静止状态,进一步包括:
23.计算人体检测框内的运动变化量;
24.计算人体检测框中的运动熵;
25.根据运动熵计算运动能量;
26.当运动变化量和运动能量均在目标范围内时,判定此刻待测量人物为静止状态。
27.优选的,当判定此刻待测量人物为静止状态后,确定人体姿态是否满足要求;所述要求包括人体姿态为直立状态以及检测到人脸。
28.优选的,根据待测量人物为静止状态时的人体图像计算身高,进一步包括:
29.根据待测量人物为静止状态时的人体图像确定用于计算人体目标身高的第一图像坐标和第二图像坐标;
30.根据第一图像坐标和第二图像坐标计算待测量人体的身高。
31.优选的,根据待测量人物为静止状态时的人体图像确定用于计算人体目标身高的第一图像坐标和第二图像坐标,进一步包括:
32.进行背景减,提取前景目标区域,根据前景目标区域,进行人体轮廓检测,生成人体目标的最小外接矩形,确定人体的第一图像坐标和第二图像坐标。
33.优选的,根据第一图像坐标和第二图像坐标计算待测量人体的身高,进一步包括:
34.确定待测量人物是否在指定范围内;
35.当待测量人物是在指定范围内时,利用以下公式计算人体身高
[0036][0037]
其中,v表示成像平面内第一图像坐标和第二图像坐标之间的距离,25.4表示英寸和毫米之间的转换尺度,1英寸=25.4毫米,w3表示显示屏的水平分辨率,单位为像素,h3表示显示屏的垂直分辨率,单位为像素,ss表示显示器屏幕英寸数,ppi的单位为像素/英寸,ppi/25.4表示每毫米多少像素点,f为摄像机的等效焦距,z为摄像头和人之间的距离,b为图像坐标系矫正参数,c为距离矫正参数。
[0038]
优选的,根据第一图像坐标和第二图像坐标计算待测量人体的身高,进一步包括:
[0039]
确定待测量人物是否在指定范围内;
[0040]
当待测量人物是不在指定范围内时,在相机视野范围内至少两个个标定点,并确定标定点的坐标;
[0041]
根据交比投影不变性原理以及第一图像坐标、第二图像计算出参考面内的人体最高点和最低点;
[0042]
根据参考面内的人体最高点和最低点并利用三角形相似原理计算出实际人体身高。
[0043]
另一方面,本发明还提供一种身高测量装置,包括:
[0044]
获取单元,用于获取待测量人体的视频图像;
[0045]
预处理单元,用于对所述视频图像预处理得到每一帧的灰度图像;
[0046]
提取单元,用于识别所述灰度图像中的人体并进行人体检测和跟踪,提取出人体图像;
[0047]
处理单元,用于对所述人体图像进行帧间差分处理;
[0048]
第一计算单元,用于计算经过差分处理后的人体图像的运动变化量和运动能量,当运动变化量和运动能量达到预设值时,判定此刻待测量人物为静止状态;
[0049]
第二计算单元,用于根据待测量人物为静止状态时的人体图像计算身高。
[0050]
本发明相对于现有技术的有益效果是:该身高测量方法通过准确获取人体静止直立时候的图片用于计算身高,提高了身高检测的精度;另外,计算身高的时候加入了矫正参数,通过多组数据进行了参数拟合,提高了身高检测精度;而且无需人到医院进行体检,可以远程进行非接触式体检,提高用户体验,节约了用户的时间成本。
附图说明
[0051]
图1是本发明一实施例提供的一种身高测量方法的流程图;
[0052]
图2是本发明一实施中人体检测框的示意图;
[0053]
图3是本发明一实施中人体与指定线位置关系的示意图;
[0054]
图4是本发明一实施中场景模型的示意图;
[0055]
图5是本发明一实施中交比投影不变形原理的示意图;
[0056]
图6是本发明一实施中场景模型的正视图;
[0057]
图7是本发明一实施例提供的一种身高测量装置的结构图。
具体实施方式
[0058]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0059]
参照图1,本实施例提供一种身高测量方法,包括以下步骤:
[0060]
s10:获取待测量人体的视频图像;
[0061]
具体的,当开始测量身高时,通过摄像头获取视频图像,当获取到第一帧视频图像后,需要判断是否已经建立了背景模型,若未建立背景模型,则将第一帧视频图像用于建立背景模型;当建立好背景模型后,提醒人体站到指定区域内。
[0062]
应当说明的是,建立背景模型属于本领域的常规技术手段,故在此不再赘述,另外,本实施例中所指的摄像头可以是检测设备上的摄像头,也可以是远程的图像采集设备,例如手机、电脑、或者能够远程通信的监控设备等等。
[0063]
s20:对所述视频图像预处理得到每一帧的灰度图像,
[0064]
具体的,当采集到视频图像后,将彩色图像转化为灰度图像;在本实施例中,为了提高检测速度,首先将彩色视频图像转换为灰度图像。彩色空间变换为灰度空间的方法为:
[0065]
gray
t
[i,j]=0.299*r
t
[i,j]+0.587*g
t
[i,j]+0.114*b
t
[i,j]
ꢀꢀꢀ
(1)
[0066]
其中,i=1,2,...,w1,j=1,2,...h1,w1为彩色图像的宽度,h1为彩色图像的高度,i,j是变量,用i表示彩色图像中某点的横坐标位置,j表示彩色图像中某点的纵坐标位置,r
t
[i,j]表示第t帧水平位置为i,垂直位置为j像素点处的rgb颜色空间的红色(r)分量值,g
t
[i,j]表示第t帧水平位置为i,垂直位置为j像素点处的rgb颜色空间的绿色(g)分量值,b
t
[i,j]表示第t帧水平位置为i,垂直位置为j像素点处的rgb颜色空间的蓝色(b)分量值,gray
t
[i,j]表示第t帧灰度图像水平位置为i,垂直位置为j像素点处的值。
[0067]
s30:识别所述灰度图像中的人体并进行人体检测和跟踪,提取出人体图像;
[0068]
具体的,在本实施例中,使用基于yolov3的行人检测系统检测人体,由于该技术手段属于本领域的现有技术手段,故在此不再赘述。
[0069]
对当前帧和上一帧之间的人体进行跟踪匹配,当人体跟踪上后,根据当前帧和上一帧图像中人体的位置的最小外接矩形确定人体检测框确定方法如图2所示,用left表示灰度图像中人体检测框左上点的横坐标,top为灰度图像中人体检测框的左上点的纵坐标,right表示灰度图像中人体检测框的右下点的横坐标,bottom表示灰度图像中人体检测框的右下点的纵坐标。根据人体检测框提取第t帧人体图像body
t
[i',j']的计算公式为:
[0070]
body
t
[i',j']=gray
t
[i'+left,j'+top]
ꢀꢀꢀ
(2)
[0071]
其中,i
′
,j
′
是变量,用i'表示人体图像中某点的横坐标位置,j
′
表示人体图像中某点的纵坐标位置,i'=1,2,...,w2,j'=1,2,...h2,w2为人体图像的宽度,h2为人体图像的高度。
[0072]
s40:对所述人体图像进行帧间差分处理;
[0073]
具体的,对连续两帧的人体图像进行帧间差分处理,处理流程如下:
[0074]
s401:将人体图像进行高斯模糊,得到高斯平滑后的人体图像;
[0075]
高斯模糊就是对图像邻域内像素进行平滑时,邻域内不同位置的像素被赋予不同
的权值。
[0076]
在本发明实施例中,使用基于opencv的gaussianblur函数对第t帧和第t-1帧人体图像进行高斯平滑,分别得到高斯平滑后的人体图像i
t
[i',j']和i
t-1
[i',j']。
[0077]
s402:将高斯平滑后的人体图像做帧间差分处理;
[0078]
将第t帧与第t-1帧高斯平滑后的人体图像做帧间差,并二值化,帧间差二值化图像的计算公式如下所示:
[0079][0080]
其中,th0为帧间差分二值化的阈值,在本发明实施例中,th0=25。
[0081]
s403:基于密度的滤波函数去噪
[0082]
在去噪的过程中,首选,计算帧间差图像的积分图像;具体是使用积分图是数字数学处理中常用的一种方法,通常能够很大程度的加速计算过程,比如均值滤波,非局部均值滤波,以及harr计算等。
[0083]
从直观来说,一张图像就是一个矩形,这个矩形中每个像素点的积分值,就是以图像左上角像素点为左上角顶点,以该像素点为右下角顶点的矩形中包含的所有元素之和。
[0084]
实际计算积分图的时候,为了提高计算效率,通常不会对每一个像素点都重新计算积分图值,而是利用相邻点的积分值实现快速计算,帧间差图像中非零的各像素点的积分图像的计算公式为:
[0085]
sum
t
[i
′
,j
′
]=sum
t
[i
′‑
1,j
′
]+sum
t
[i
′
,j
′‑
1]-sum
t
[i
′‑
1,j
′‑
1]+d
t
[i
′
,j
′
]
ꢀꢀꢀ
(3)
[0086]
其中,边界处的计算,sum
t
[0,0]=fd
t
[0,0],第一行sum[i',0]=sum[i'-1,0]+fd
t
[i',0],对于第一列:sum[0,j']=sum[0,j'-1]+fd
t
[0,j']
[0087]
接着,进行积分图图像去噪,具体的,从左到右、从上到下遍历积分图像,选取a大小的结构体进行去噪计算,得到去噪后的人体图像差分二值图fd
′
t
[i',j']。
[0088][0089]
在本发明实施例中,a=2。
[0090]
s50:计算经过差分处理后的人体图像的运动变化量和运动能量,当运动变化量和运动能量达到预设值时,判定此刻待测量人物为静止状态;
[0091]
具体的,首选计算人体检测框内的运动变化量m
t
,计算第t帧与第t-1帧之间的运动变化量m
t
,计算方法如下:
[0092][0093]
接着计算人体检测框中的运动熵,计算第t帧人体检测框内的前景点数量,即统计fd
′
t
[i',j']=1的像素点个数,记为n。
[0094]
当n≤5时,表示人体图像中,帧间发生变化的点少于等于5个,则直接判断目标已
经静止下来,进入步骤s60。
[0095]
当n>5时,对人体检测框内fd
′
t
[i',j']=1处的帧间差值|i
t
[i',j']-i
t-1
[i',j']|进行直方图统计his[|i
t
[i',j']-i
t-1
[i',j']|],得到直方图统计值,其中
[0096]
计算运动能量
[0097][0098]
其中,p
p
表示所有fd
′
t
[i',j']=1的像素点处,帧间差值|i
t
[i',j']-i
t-1
[i',j']|等于p的概率,故有故,公式(6-1)可以变换为公式(6-2)
[0099][0100]
当运动变化量m
t
<th2且e
t
<th3时,此刻待测量人物为静止状态,此刻的图像可以用于测量身高,否则直接判定为目标还没静止下来,重新采集视频图像,并进行灰度处理,重复上述的步骤。
[0101]
应当说明的是,th2<=0.2,表示最大能容忍的人体运动点比例,th3<=3表示最大容忍的运动能量值,在本发明实施例中,th2=0.1且th3=2。
[0102]
s60:根据待测量人物为静止状态时的人体图像计算身高;
[0103]
在本实施例中,为了能够准确的测量身高,在正式计算之前还需要判断人体姿态是否为直立,当否时,需要提醒人体站直,并重新采集图像;
[0104]
应当理解的是,判断人体是否直立的方法是使用的基于opencv的openpose对人体进行关键点检测,分别获取肩膀、脚踝、膝盖、手腕等的位置,然后即使这些位置之间的关系判断人体是否直立。由于在本领域内属于现有技术手段,故在本发明中不做详细描述。
[0105]
在另外一些实施例中,为了提高测量精度,还需要进行人脸检测,当没检测到人脸时,提醒人体退后或靠前,并重新采集图像,应当说明的是,由于人脸检测属于现有技术手段,故在此不再赘述。
[0106]
当以上步骤结束之后,需要计算人体目标身高的高点(第一图像坐标)和低点(第二图像坐标)。在本实施例中,进行背景减,提取前景目标区域,根据前景目标区域,进行人体轮廓检测,生成人体目标的最小外接矩形,确定人体的高点(即第一图像坐标)和低点(即第二图像坐标)。
[0107]
获取最小外接矩形与人体轮廓顶部切点的坐标,设置为第一图像坐标。为了提高身高测量的准确性以及便于计算,可以取双脚之间的中点(即下端点)的坐标作为用于计算人体目标身高的第二图像坐标,如图3所示。
[0108]
在得到最高点以及最低点的坐标之后,就能够计算人体身高了,在本实施例中提供两种计算方式,这两种计算方式基于人体是否站在指定范围内,因此在计算之前需要判断人是否在指定范围内,如果人在指定范围内,按照身高检测方法一计算身高,否则,使用第二种方式计算身高。
[0109]
在本实施例中,判断人是否在指定范围内的原理如下:
[0110]
如果指定的站立线,与人在成像平面内的最高点与最低点的连线相交,且此交点与第二图像坐标的距离小于设定阈值th4,则表明人体站到了指定范围内,否则表明人体未站到指定范围内。示意图如图3所示:
[0111]
如果人在指定范围内,根据计算方式一的方法计算身高,否则,根据计算方式二的方法计算身高。
[0112]
计算方式一:
[0113]
s611:根据得到第一图像坐标和第二图像坐标,也即成像平面中人体最高点以及最低点,分别记为t',f',成像平面中人体最高点和最低点的坐标分别为(x4,y4),(x5,y5),身高用height表示,根据人体图像的像素点的像素和对应人体部位的空间实际坐标的坐标转换公式,则身高检测方法一的计算公式为:
[0114][0115]
其中,v表示成像平面内第一图像坐标和第二图像坐标之间的距离,25.4表示英寸和毫米之间的转换尺度,1英寸=25.4毫米,w3表示显示屏的水平分辨率,单位为像素,h3表示显示屏的垂直分辨率,单位为像素,ss表示显示器屏幕英寸数,ppi的单位为像素/英寸,ppi/25.4表示每毫米多少像素点,f为摄像机的等效焦距,z为摄像头和人之间的距离。b为图像坐标系矫正参数,c为距离矫正参数。首先已知身高的人站在指定的地方,通过多次计算,可以拟合得到,参数b和参数c的值,便可以根据公式计算得到人的身高。
[0116]
在此需要说明的是,公式中b和c是通过多组测试,线性拟合得到。
[0117]
在本发明实施例中,已知测试人一身高1.60米,测试人一站在2.5米时,获取测试人一在图像中的第一图像坐标和第二图像坐标,已知测试人二身高1.70米,通过测试人二站在2.5米时,获取测试人二在图像中的第一图像坐标和第二图像坐标,通过2组数据就可以求得参数b和c,为了使得矫正参数更加精确,我们进行了10组测试,使用10组数据通过最小二乘法拟合得到最优的b和c。
[0118]
c<=0.5表示距离误差小于0.5米,b<=10,用于矫正坐标系中计算出的人体第一图像坐标和第二图像坐标之间的误差。
[0119]
计算方式二:参照图4,图4为整个系统的场景模型示意图,当人体未站在指定区域内时,选择一个带有3个已知高度的标定点的标尺垂直于地面去做标定。
[0120]
由于三条水平参考线成像后的即使只有1个值,但是由于摄像机拍摄角度的原因三条水平线成像后,并不一定仍然是水平的,因此我们计算图像中2点之间的距离时,不是直接计算2点之间的纵坐标,而是计算2点之间的欧式距离。
[0121]
计算身高的流程如下:
[0122]
s621:在摄像头部署时提前在相机视野范围内拿一根标尺垂直于地面,设置3个标定点h1,h2,h3,这3个标定点和地面的高度是已知的,分别是h1,h2,h3,标尺所在平面我们称为参考面,由于智能体检机中,相机离地面的高度是已知的为hc,获取标尺上的3个标定点在成像平面中的点分别为z1,z2,z3三个点的坐标分别为(x1,y1),(x2,y2),(x3,y3),获
取好后可以取掉标尺。
[0123]
s622:由于得到第一图像坐标和第二图像坐标,也即t',f'点的坐标(x4,y4),(x5,y5);根据交比投影不变性原理可以计算得出参考面内的人体最高点和最低点t”,f”,标尺平面内的人体最高点和最低点的高度为h4,h5;
[0124]
交比投影不变性原理如图5所示,若有4个点a、b、c、d共线于直线l1,它们经投影中心投射到直线l2上,对应的像点分别是a'、b'、c'、d',则存在如下关系:
[0125][0126]
因此参考面内人体最高点和最低点与标定点h1,h2,h3的关系满足较比投影不变原理,可以根据该关系计算得出参考面上头的高度。
[0127]
由于自然坐标系中,人与标尺是平行的,所以成像平面中z1,z2,z3组成的线与t',b
‘
组成的线是平行的或共线的,当t',b
‘
组成的线与z1,z2,z3组成的线共线时,直接计算,当t',b
‘
组成的线与z1,z2,z3组成的线不共线时,将t',b
‘
平行移动到与z1,z2,z3共线的线上,设移动后t’的横坐标为x4',纵坐标为y4',b'的横坐标为x5',纵坐标为y5'。
[0128]
在本发明实施例中,以t',b
‘
组成的线与z1,z2,z3组成的线共线的情况进行介绍,具体方法如下:
[0129]
当t'在z2上方时,即y4<y2时,参考面上的点t”,h1,h2,h3与成像平面上的点t',z1,z2,z3满足下面的比例关系:
[0130][0131]
其中,distance()表示两点之间的距离,在成像平面内,distance()表示两点之间的欧式距离,在参考面内,distance()表示两点之间的高度差异。
[0132]
则公式(9)变为:
[0133][0134]
将用参数α表示,用参数β表示,则
[0135]
当t'恰好在z2点时,即y4=y2时,则h4=h2;
[0136]
当t'在z2下方时,即y4>y2时,参考面上的点t”,h1,h2,h3与成像平面上的点t',z1,z2,z3满足下面的比例关系:
[0137][0138]
其中,distance()表示两点之间的距离,在成像平面内,distance()表示两点之间的欧式距离,在参考面内,distance()表示两点之间的高度差异。
[0139]
则公式(11)变为:
[0140][0141]
将用参数δ表示,则
[0142]
依次类推,可以得出参考面上脚的纵坐标。
[0143]
当f'在z2下方,y5>y2时,满足公式(13)
[0144][0145]
将用ε表示,将用γ表示,
[0146]
则,
[0147]
当y5=y2时,h5=h2,
[0148]
当f'在z2上方,y5<y2时,满足公式(14)
[0149][0150]
将用η表示,则,
[0151]
当t',b
‘
组成的线与z1,z2,z3组成的线不共线时,将公式(11)、(12)、(13)、(14)中的x4,y4,x5,y5对应换成x4',y4',x5',y5'进而计算得出h5。
[0152]
s623:根据三角形相似原理计算出实际人体身高height,具体的,图4场景模型的正视图如图6所示,根据三角形相似原理,有
[0153]
其中,tf表示点t和点f之间的距离,sf表示点s和点f之间的距离,t”f”表示点t”和f”的之间的距离,sf”表示点s和f”的之间的距离,se表示点s和点e之间的距离,se'表示点s和点e'之间的距离。
[0154]
因此,身高height可以通过点t”和f”的高度和摄像机的高度计算出来,其计算公式如下:
[0155][0156]
其中,d为图像坐标系中的矫正参数,e为空间坐标系中的身高矫正参数。
[0157]
由于空间坐标系中,人是有宽度和厚度的,单纯的通过成像面中的最高点最低点确定的身高是有误差的,因此,我们加入了身高矫正环节,预先通过多组测试值,得到d,e的拟合值,进而提高身高检测的精度。
[0158]
该身高测量方法通过准确获取人体静止直立时候的图片用于计算身高,提高了身高检测的精度;另外,计算身高的时候加入了矫正参数,通过多组数据进行了参数拟合,提高了身高检测精度;而且无需人到医院进行体检,可以远程进行非接触式体检,提高用户体验,节约了用户的时间成本。
[0159]
参照图7,本实施例还提供一种身高测量装置,包括:
[0160]
获取单元100,用于获取待测量人体的视频图像;在此需要说明的是,由于具体的获取方式在上述身高测量方法的实施例的步骤s10中已经详细阐述,故在此不在赘述。
[0161]
预处理单元200,用于对所述视频图像预处理得到每一帧的灰度图像,在此需要说明的是,由于具体的预处理方式在上述身高测量方法的实施例的步骤s20中已经详细阐述,故在此不在赘述。
[0162]
提取单元300,用于识别所述灰度图像中的人体并进行人体检测和跟踪,提取出人体图像;在此需要说明的是,由于具体的提取方式在上述身高测量方法的实施例的步骤s30中已经详细阐述,故在此不在赘述。
[0163]
处理单元400,用于对所述人体图像进行帧间差分处理;在此需要说明的是,由于具体的处理方式在上述身高测量方法的实施例的步骤s40中已经详细阐述,故在此不在赘述。
[0164]
第一计算单元500,用于计算经过差分处理后的人体图像的运动变化量和运动能量,当运动变化量和运动能量达到预设值时,判定此刻待测量人物为静止状态;在此需要说明的是,由于具体的计算方式在上述身高测量方法的实施例的步骤s50中已经详细阐述,故在此不在赘述。
[0165]
第二计算单元600,用于根据待测量人物为静止状态时的人体图像计算身高。
[0166]
以上参照附图描述了根据本发明的实施例的用于测量身高的示例性流程图;在此需要说明的是,由于具体的计算方式在上述身高测量方法的实施例的步骤s60中已经详细阐述,故在此不在赘述。
[0167]
应指出的是,以上描述中包括的大量细节仅是对本发明的示例性说明,而不是对本发明的限制。在本发明的其他实施例中,该方法可具有更多、更少或不同的步骤,且各步骤之间的顺序、包含、功能等关系可以与所描述和图示的不同。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1