手术操作系统的制作方法
本发明涉及医疗器械,特别涉及一种手术操作系统。
背景技术:
1、良性前列腺增生(benign prostatic hyperplasia,bph),是一种中老年男性常见疾病,其主要表现有前列腺间质和腺体成分增生、前列腺增大(benign prostaticenlargement,bpe)、下尿路症状(lower urinary tract symptoms,luts)以及膀胱出口梗阻(bladder outlet obstruction,boo)等。目前,对于良性前列腺增生的治疗手段有药物治疗和手术治疗两种方式,其中手术治疗包括:(1)经尿道前列腺电切术;(2)耻骨上或耻骨后前列腺切除术;(3)激光前列腺剜除术或切除术;(4)植入物的微创伤治疗术等。其中,植入物的微创伤治疗术是通过输送系统向人体内植入永久植入物,利用植入物机械性地将前列腺两叶分开,使其不再阻塞尿道,以持续地缓解bph患者的症状,且无需进行前列腺组织的切除与消融,减轻了患者的痛苦,可使患者尽快恢复正常生活。
2、现有技术中输送系统首先利用穿刺针将植入物植入人体,然后回撤穿刺针,最后利用输送系统上的剪断推送机构剪切植入物上多余的连接件。然而,由于现有输送系统的识别和穿刺定位的局限性,同时不同的增生情况导致的前列腺内部器官特征不明显,不容易有效识别和用于穿刺定位参考。此外,不同医生操作的手法要规范到一致也很难,这对手术医生的经验和熟练度都提出了很高的要求。因此,完全靠医生的经验和其它有限的辅助监测手段,很难找到最佳的提拉位置,一旦提拉位置不对,有可能会造成提拉通道扭曲,不能达到最佳的提拉效果,甚至会引发严重的医疗事故。
3、因此,亟需一种新的手术操作系统,以提高定位和识别精准度,降低对人工经验的依赖性,以实现标准化作业。
技术实现思路
1、本发明的目的在于提供一种手术操作系统,以解决如何提高定位和识别精准度、如何实现标准化操作以及如何提高操作精准性中的至少一个问题。
2、为解决上述技术问题,本发明提供一种手术操作系统,包括:信息采集单元、输送单元和控制单元;其中,
3、所述输送单元包括输送装置和机械臂;所述输送装置中容置有植入物,所述机械臂与所述输送装置相接,用于将所述输送装置运送至目标位置,以释放所述植入物;
4、所述信息采集单元,置于所述输送装置的远端,用于获取移动位置信息和空间图像信息,并发送给所述控制单元;
5、所述控制单元用于根据所述移动位置信息和所述空间图像信息确定所述植入物的释放位置和释放轨迹,控制所述输送装置释放所述植入物,并实时显示所述输送装置的位置。
6、可选的,在所述的手术操作系统中,所述信息采集单元包括超声波探测器和摄像头;所述超声波探测器用于获取所述移动位置信息,所述摄像头用于获取所述空间图像信息。
7、可选的,在所述的手术操作系统中,所述摄像头和所述超声波探测器与所述输送装置的远端相接,且所述摄像头的成像视野覆盖所述输送装置的外周。
8、可选的,在所述的手术操作系统中,所述输送装置包括输送管和手柄;所述输送管的远端与所述信息采集单元相接,所述输送管的近端与所述手柄相接;所述手柄与所述机械臂相接;其中,所述输送管中容置有所述植入物,所述手柄经所述机械臂操控,以释放所述植入物。
9、可选的,在所述的手术操作系统中,所述输送管中容置有穿刺针;所述穿刺针为中空结构,且至少部分所述植入物位于所述穿刺针中;
10、所述穿刺针经所述输送管上的开口穿出,并沿所述释放轨迹运动,以释放所述植入物;以及,在释放所述植入物之后,所述穿刺针经所述开口撤回至所述输送管内。
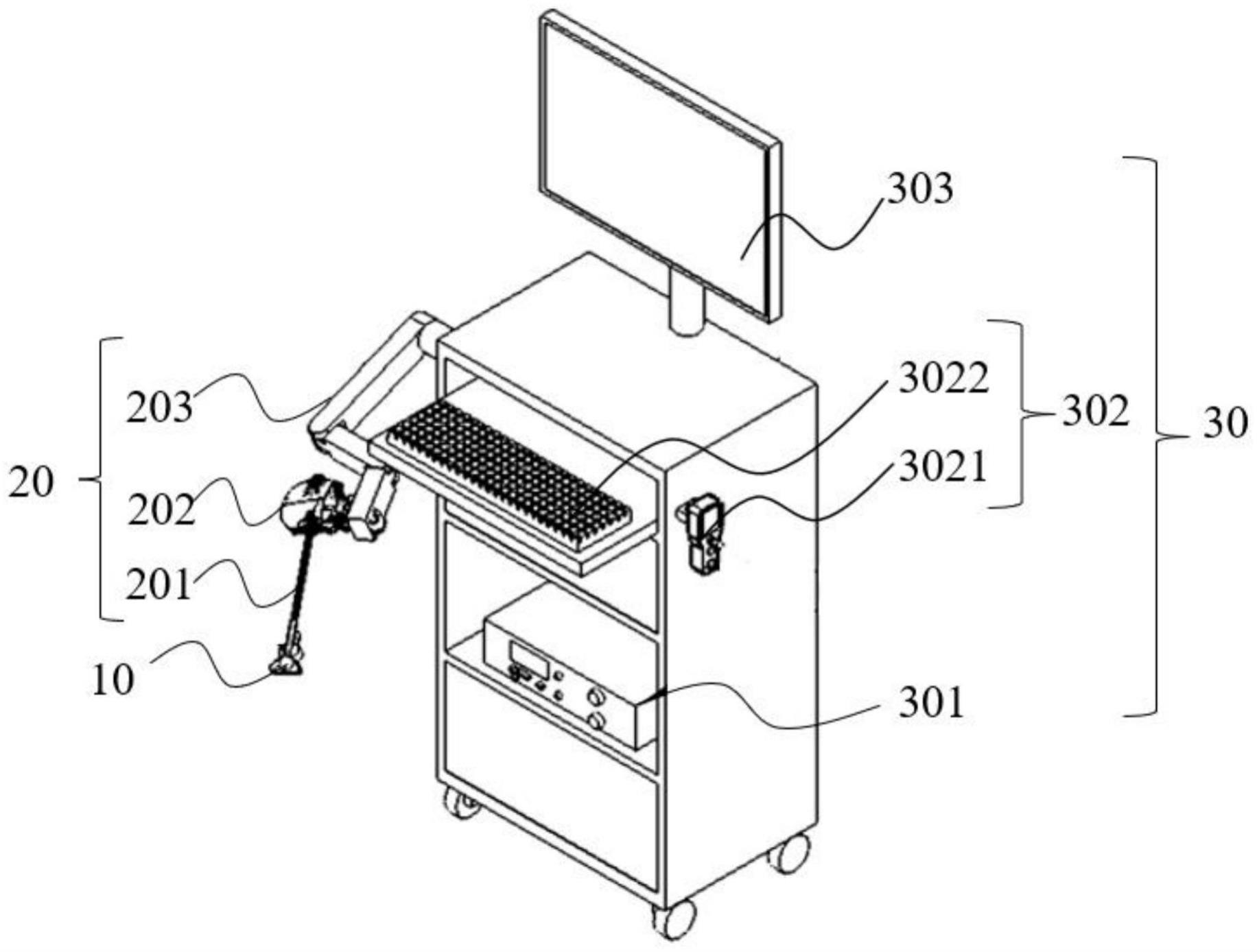
11、可选的,在所述的手术操作系统中,所述控制单元包括处理器、显示器和输入器;且所述显示器、所述输入器、所述机械臂和所述信息采集单元分别与所述处理器电连接;
12、其中,所述信息采集单元将获取的所述移动位置信息和所述空间图像信息发送至所述处理器;所述处理器接收所述移动位置信息和所述空间信息,并确定所述植入物的释放位置和释放轨迹;所述显示器显示所述释放轨迹以及实时显示所述输送装置的位置;所述输入器将输入信息发送至所述处理器,所述处理器根据所述输入信息生成控制信号,并将所述控制信号发送给所述机械臂。
13、可选的,在所述的手术操作系统中,所述输入器包括键盘和控制摇杆;所述键盘和所述处理器相连,所述控制摇杆分别与所述处理器和所述机械臂相连,以控制所述机械臂依照所述释放轨迹,释放所述植入物。
14、可选的,在所述的手术操作系统中,所述手术操作系统还包括承载架;所述处理器、所述显示器和所述输入器均设置于所述承载架上,所述机械臂与所述承载架相连。
15、可选的,在所述的手术操作系统中,所述手术操作系统还包括定位球囊和输送支架;所述输送支架用于运送所述定位球囊至限位区域,以在所述定位球囊位于所述限定位置之后,所述输送单元和所述信息采集单元伸入所述目标位置。
16、可选的,在所述的手术操作系统中,所述定位球囊与所述输送支架的远端可拆卸连接。
17、综上所述,本申请提供的所述手术操作系统在所述输送单元的远端设置有所述信息采集单元,以能够获得在植入物输送过程中所述输送装置的移动位置信息和所述输送装置的周围的空间图像信息,从而使得所述控制单元能够根据获取的信息确定所述植入物准确的释放位置和释放轨迹,提高了定位和识别的精准度,避免了因内窥镜提供的有限数据造成了认知偏差,而导致打偏打错位置。同时,还能通过所述信息采集单元获取植入物的实时释放过程信息,实现对释放情况的监控。此外,本发明通过机械臂操作,保证了输出稳定性,便于机械复制,可降低对人工经验的依赖,实现标准化作业。
18、因此,本发明不仅能够提高对植入位置和植入轨迹的精准定位和精准识别,还可以降低对人工经验的依赖,实现标准化作业,提高操作精准性。
技术特征:
1.一种手术操作系统,其特征在于,包括:信息采集单元、输送单元和控制单元;其中,
2.根据权利要求1所述的手术操作系统,其特征在于,所述信息采集单元包括超声波探测器和摄像头;所述超声波探测器用于获取所述移动位置信息,所述摄像头用于获取所述空间图像信息。
3.根据权利要求2所述的手术操作系统,其特征在于,所述摄像头和所述超声波探测器与所述输送装置的远端相接,且所述摄像头的成像视野覆盖所述输送装置的外周。
4.根据权利要求1所述的手术操作系统,其特征在于,所述输送装置包括输送管和手柄;所述输送管的远端与所述信息采集单元相接,所述输送管的近端与所述手柄相接;所述手柄与所述机械臂相接;其中,所述输送管中容置有所述植入物,所述手柄经所述机械臂操控,以释放所述植入物。
5.根据权利要求4所述的手术操作系统,其特征在于,所述输送管中容置有穿刺针;所述穿刺针为中空结构,且至少部分所述植入物位于所述穿刺针中;
6.根据权利要求1所述的手术操作系统,其特征在于,所述控制单元包括处理器、显示器和输入器;且所述显示器、所述输入器、所述机械臂和所述信息采集单元分别与所述处理器电连接;
7.根据权利要求6所述的手术操作系统,其特征在于,所述输入器包括键盘和控制摇杆;所述键盘和所述处理器相连,所述控制摇杆分别与所述处理器和所述机械臂相连,以控制所述机械臂依照所述释放轨迹,释放所述植入物。
8.根据权利要求6所述的手术操作系统,其特征在于,所述手术操作系统还包括承载架;所述处理器、所述显示器和所述输入器均设置于所述承载架上,所述机械臂与所述承载架相连。
9.根据权利要求1所述的手术操作系统,其特征在于,所述手术操作系统还包括定位球囊和输送支架;所述输送支架用于运送所述定位球囊至限位区域,以在所述定位球囊位于所述限定位置之后,所述输送单元和所述信息采集单元伸入所述目标位置。
10.根据权利要求9所述的手术操作系统,其特征在于,所述定位球囊与所述输送支架的远端可拆卸连接。
技术总结
本发明提供一种手术操作系统,包括:信息采集单元、输送单元和控制单元。其中,所述信息采集单元能够获得在植入物输送过程中所述输送装置的移动位置信息和所述输送装置周围的空间图像信息,从而使得所述控制单元能够根据获取的信息确定所述植入物准确的释放位置和释放轨迹,提高了定位和识别的精准度,避免了因内窥镜提供的有限数据造成了认知偏差,而导致打偏打错位置。同时,还能通过所述信息采集单元获取植入物的实时释放过程信息,实现对释放情况的监控。此外,本发明通过机械臂操作,保证了输出稳定性,便于机械复制,可降低对人工经验的依赖,实现标准化作业。
技术研发人员:张佳,汪振
受保护的技术使用者:微创优通医疗科技(上海)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!