一种非接触式后极部巩膜高速扫频光学相干弹性成像系统
1.本发明涉及眼科成像技术领域,具体涉及一种非接触式后极部巩膜高速扫频光学相干弹性成像系统。
背景技术:
2.巩膜是位于眼球壁外层的富含胶原纤维的瓷白色结缔组织,其质地坚硬,可以抵抗眼压向外扩张的作用力,对于眼球形状的维持起到重要作用。巩膜在解剖结构上可以分为前部巩膜、赤道部巩膜和后极部巩膜,各部分巩膜的显微结构及力学性能存在差异,其中后极部巩膜的力学性能最弱,最容易出现形状改变。研究者们发现后极部巩膜生物力学性能的改变与青少年近视及青光眼等多种眼部疾病的发生发展有着紧密的联系。由于当前尚缺乏治疗近视及青光眼的有效方法,因此,对上述疾病的早期预警是临床研究热点。相较于当前常规的检测方法,后极部巩膜生物力学性能检测将更有助于近视及青光眼等疾病的早期预警,为上述疾病的早期干预提供时间窗口。
3.现阶段临床上后极部巩膜生物力学性能测量的方法主要为超声弹性成像及核磁共振弹性成像技术。上述方法成像穿透深度大,适用于各大脏器如肝脏、乳腺等组织的弹性测量,但其空间分辨率差,难以对后极部巩膜(厚度仅为1mm)进行高清成像。在实验室阶段,美国加州大学陈忠平教授团队利用谱域光学相干层析成像技术(spectral domain optical coherence tomography,sd-oct)来对活体兔眼后极部巩膜组织进行高清成像;并在此基础上利用强穿透性的声辐射力,研发声辐射力光学相干弹性成像技术。在水浴环境下,利用上述系统成功诱导后极部巩膜产生微小形变,实现活体兔眼后极部巩膜生物力学性能的测量。但是,上述系统存在以下缺陷:1)oct成像系统采用sd-oct,其虽然能实现兔眼后极部巩膜的成像,但难以对人眼后极部巩膜进行高清成像;2)声辐射力需要耦合剂介导,同时可能会对眼内其他组织,如晶状体和视网膜等造成损伤,在临床应用上面临极大困难。
技术实现要素:
4.为了克服背景技术的不足,本发明提供一种非接触式后极部巩膜高速扫频光学相干弹性成像系统。
5.本发明所采用的技术方案:一种非接触式后极部巩膜高速扫频光学相干弹性成像系统,包括控制中心、phs-ssoct装置、微空气脉冲发射装置,
6.所述phs-ssoct装置包括扫频光源、第一光纤耦合器、第二光纤耦合器、布拉格光纤光栅、样品臂、参考臂、第三光纤耦合器、平衡探测器、光电探测器;
7.所述扫频光源与控制中心连接,用于输出光束;
8.所述第一光纤耦合器采用2x2光纤耦合器,其具有第一端口、第二端口、第三端口、第四端口,所述第一端口与扫频光源对应连接,所述第二端口连接光电探测器,光电探测器连接控制中心,所述第三端口连接第二光纤耦合器,所述第四端口连接布拉格光纤光栅,扫频光源所输出的光束通过第一光纤耦合器后分别从第三端口、第四端口进入到第二光纤耦
合器与布拉格光纤光栅;
9.所述第二光纤耦合器采用2x2光纤耦合器,其具有第五端口、第六端口、第七端口、第八端口,所述第五端口与第一光纤耦合器的第三端口对应连接,所述第六端口连接第三光纤耦合器,所述第七端口连接样品臂,所述第八端口连接参考臂,光束通过第二光纤耦合器后分别从第七端口、第八端口进入到样品臂与参考臂;
10.所述第三光纤耦合器采用2x2光纤耦合器,其具有第九端口、第十端口、第十一端口、第十二端口,所述第九端口与第二光纤耦合器的第六端口对应连接,所述第十端口连接参考臂,所述第十一端口与第十二端口连接平衡探测器,所述平衡探测器连接控制中心;
11.所述微空气脉冲发射装置包括信号发生器、驱动器、储气瓶,所述储气瓶的输出管道上安装有电磁阀,电磁阀上安装有喷头,所述信号发生器与控制中心、驱动器连接,能够为驱动器提供输入控制信号,所述驱动器连接电磁阀,能够控制电磁阀启闭动作。
12.所述第一光纤耦合器的分光比为90:10,所述第二光纤耦合器的分光比为80:20,所述第三光纤耦合器的分光比为50:50。
13.所述扫频光源的中心波长为1060nm,所述扫频光源的扫描速度大于100khz。
14.所述样品臂包括依次设置的第一准直镜、二维扫描振镜、二向色镜、聚焦镜、前置镜,还包括固视视标,所述固视视标与二向色镜对应设置。
15.所述参考臂包括对应设置的第二准直镜与第三准直镜,所述第二准直镜与第二光纤耦合器的第八端口连接,所述第三准直镜与第三光纤耦合器的第十端口连接。
16.所述微空气脉冲发射装置还包括直流电源,所述直流电源与驱动器连接,能够为驱动器提供24v的瞬时电压和5v的维持电压。
17.后极部巩膜弹性模量的测量方法包括如下步骤:
18.1、phs-ssoct装置与微空气脉冲发射装置的相互整合:
19.将微空气脉冲发射装置的喷头与人眼前部巩膜组织相对应,并利用喷头喷出微空气脉冲,诱导人眼前部巩膜组织形变,该形变信息能以弹性波的形式传播至后极部巩膜,同时通过phs-ssoct装置快速获取高清后极部巩膜图像,
20.2、基于相位分辨多普勒算法和res-unet神经网络模型来提取后极部巩膜的形变信号:
21.2.1获得复数信号
22.对phs-ssoct装置采集的时间干涉信号进行快速傅里叶变换,得到以深度z为变量的复数信号,其计算公式为:s(z)=a(z)e
iφ(z)
,其中,a(z)为振幅信息,φ(z)为相位信息;
23.2.2多普勒相位计算
24.根据相邻两次a-line信号之间的相位变化推算得出多普勒频移fd,其计算公式为:
25.其中,δφ为相邻两次a-line之间的相位差,t为相邻两次a-line之间的时间差;
26.通过对相邻两条a-line进行互相关运算,计算得到相位差,其计算公式为:
[0027][0028]
基于多普勒效应,得到运动组织样品的相对速度v,其计算公式为:
[0029]
其中,λ0为扫频光源的中心波长,n为组织样品的折射率;
[0030]
最终得出相邻两条a-line之间的相对位移δd,其计算公式为:
[0031][0032]
2.3图像分割
[0033]
基于res-unet神经网络模型实现脉络膜和后极部巩膜间边界的自动分割,res-unet神经网络包含下采样路径和上采样路径,下采样路径用于负责图像信息的卷积编码,实现不同层次高维特征的提取,上采样路径用于负责图像信息的反卷积操作,负责高维特征的解码和图像维度重建工作,最终输出分割结果;
[0034]
3、利用兰姆波模型计算后极部巩膜的弹性模量:
[0035]
kelvin
–
voigt模型中组织弹性和粘性的关系公式如下:
[0036]
μd=μ1+ωξi,其中μd为粘弹性参数,μ1为剪切模量,ω为角频率,ζ为粘性系数,i为虚数;
[0037]
巩膜组织lamb波特征方程如下:
[0038]
其中k为波数,d为组织厚度的一半,α和β为中间参量;
[0039]
α、β和k可用如下公式表述:
[0040][0041][0042]
其中c1、c2和cp分别为组织压缩波速度、剪切波速度和相速度;
[0043]
c1和c2与剪切模量μ1存在的关系公式如下:
[0044][0045]
其中ρ为组织密度,λ为拉梅常量;
[0046]
拉梅常量λ与剪切模量μ1关系如下:
[0047]
其中υ为角膜组织的泊松比;
[0048]
弹性模量e与剪切模量μ1的关系如下:
[0049]
e=2(1+υ)μ1;
[0050]
通过上述公式,计算得到弹性模量和粘性系数。
[0051]
phs-ssoct装置采用基于m-b扫描模式的oct数据采集方法,其中m扫描模式指对空间同一位点进行重复多次a-line扫描,来获取形变随时间的动态变化过程,b模式指对空间不同位点进行a-line扫描,获取组织二维横断面成像。
[0052]
微空气脉冲垂直作用于前部巩膜组织,且微空气脉冲作用于前部巩膜组织的激励位点与phs-ssoct装置b扫描模式方向共线。
[0053]
所述phs-ssoct装置的采集信号、微空气脉冲发射装置的触发信号以及扫描振镜驱动信号通过ni函数发生卡同步生成,使得图像采集与微空气脉冲发射同步;
[0054]
本发明的有益效果是:采用以上方案,可实现后极部巩膜生物力学性能的非接触式定量评估,为活体人眼后极部巩膜弹性成像提供新途径,并为近视及青光眼等眼科疾病的早期预警研究提供新工具。
附图说明
[0055]
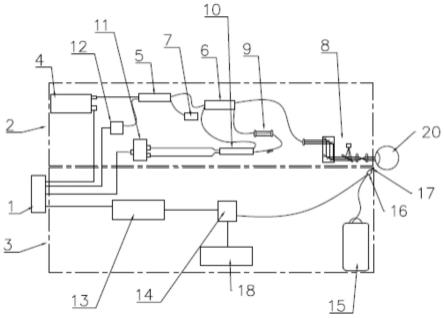
图1为本发明实施例非接触式后极部巩膜高速扫频光学相干弹性成像系统的连接结构示意图。
[0056]
图2为本发明实施例phs-ssoct装置的连接结构示意图。
具体实施方式
[0057]
下面结合附图对本发明实施例作进一步说明:
[0058]
如图1-2所示,一种非接触式后极部巩膜高速扫频光学相干弹性成像系统,其特征在于:包括控制中心1、phs-ssoct装置2、微空气脉冲发射装置3。
[0059]
所述控制中心1为电脑,用于控制以及后续图像的分析与处理。
[0060]
所述phs-ssoct装置2包括扫频光源4、第一光纤耦合器5、第二光纤耦合器6、布拉格光纤光栅7、样品臂8、参考臂9、第三光纤耦合器10、平衡探测器11、光电探测器12。
[0061]
所述扫频光源4与控制中心1连接,可在控制中心1的控制下和反馈下发射光波,所述扫频光源4的中心波长为1060nm,具有较强的组织穿透性和成像深度,可对位于眼球深部的后极部巩膜组织进行成像,所述扫频光源4的扫描速度大于100khz,可降低成像时间,减小眼动干扰。
[0062]
所述第一光纤耦合器5采用分光比为90:10的2x2光纤耦合器,其具有第一端口51、第二端口52、第三端口53、第四端口54,所述第一端口51与扫频光源4对应连接,所述第二端口52连接光电探测器12,光电探测器12连接控制中心1,所述第三端口53连接第二光纤耦合器6,所述第四端口54连接布拉格光纤光栅7,扫频光源4所输出的光束通过第一光纤耦合器5后分别从第三端口53、第四端口54进入到第二光纤耦合器6与布拉格光纤光栅7。
[0063]
所述第二光纤耦合器6采用采用分光比为80:20的2x2光纤耦合器,其具有第五端口61、第六端口62、第七端口63、第八端口64,所述第五端口61与第一光纤耦合器5的第三端口53对应连接,所述第六端口62连接第三光纤耦合器10,所述第七端口63连接样品臂8,所述第八端口64连接参考臂9,主光路的激光通过第二光纤耦合器6后分别从第七端口63、第
八端口64进入到样品臂8与参考臂9。
[0064]
所述第三光纤耦合器10采用分光比为50:50的2x2光纤耦合器,其具有第九端口101、第十端口102、第十一端口103、第十二端口104,所述第九端口101与第二光纤耦合器6的第六端口62对应连接,所述第十端口102连接参考臂9,所述第十一端口103与第十二端口104连接平衡探测器11,所述平衡探测器11连接控制中心1。
[0065]
其中,所述样品臂8包括依次设置的第一准直镜81、二维扫描振镜82、二向色镜83、聚焦镜84、前置镜85,以及固视视标86,所述固视视标86与二向色镜83对应设置。
[0066]
所述参考臂9包括对应设置的第二准直镜91与第三准直镜92,所述第二准直镜91与第二光纤耦合器6的第八端口64连接,所述第三准直镜92与第三光纤耦合器10的第十端口102连接。
[0067]
上述phs-ssoct装置2进行oct成像时,扫频光源4所输出的激光进入第一光纤耦合器5后按90:10进行分光,其中,主光路进入到第二光纤耦合器6,而较小能量部分光束则进入拉格光纤光栅7,拉格光纤光栅7可以选择性高反射特定极窄波长范围的光束,而该反射光将进入光电探测器12,能够生成更为稳定的触发信号提供给高速数据采集卡,提高系统的相位稳定性。
[0068]
主光路的激光进入第二光纤耦合器6后按80:20进行分光,分别进入样品臂8和参考臂9,样品臂8中的激光通过第一准直镜81、二维扫描振镜82、二向色镜83、聚焦镜84、前置镜85后进入眼球20,而参考臂9采用由第二准直镜91与第三准直镜92组成的透射光路来与样品臂光程匹配,经样品反射后返回的光信号将与经参考臂反射镜返回的光信号在第三光纤耦合器10中发生干涉,通过平衡探测器11进行光电转换,将干涉光信号转化为电信号,由高速数据采集卡采集并进行模数转换,传送到控制中心1进行后续处理,从而得到后极部巩膜高清oct图像。
[0069]
所述微空气脉冲发射装置3包括信号发生器13、驱动器14、储气瓶15、电磁阀16、喷头17、直流电源18,所述电磁阀16安装在所述储气瓶15的输出管道上,喷头17安装在电磁阀16上,所述信号发生器13与控制中心1、驱动器14连接,能够为驱动器14提供输入控制信号,所述驱动器14连接电磁阀16,能够控制电磁阀启闭动作,所述直流电源18与驱动器14连接,能够为驱动器14提供24v的瞬时电压和5v的维持电压。储气瓶15中的空气能够通过输出管传输到电磁阀16,电磁阀开启时,喷头17能够喷出微空气脉冲,所述控制中心1发出的信号指令可以通过信号发生器13发送至驱动器14,驱动器14能够控制电磁阀16开关及其时长来调节微空气脉冲发射的时机和流量。
[0070]
采用上述非接触式后极部巩膜高速扫频光学相干弹性成像系统进行后极部巩膜弹性模量的测量时,具体包括如下步骤:
[0071]
1、phs-ssoct装置2与微空气脉冲发射装置3的相互整合。
[0072]
所述phs-ssoct装置2用于快速获取高清后极部巩膜图像。为了以最大帧率捕获快速传播的弹性波,所述phs-ssoct装置2采用基于m-b扫描模式的oct数据采集方法,其中m扫描模式指对空间同一位点进行重复多次a-line扫描,来获取形变随时间的动态变化过程,b模式指对空间不同位点进行a-line扫描,获取组织二维横断面成像,通过m-b扫描模式可以获取后极部巩膜不同位点的动态形变数据集,为后续弹性波力学模型的分析提供数据。
[0073]
所述微空气脉冲发射装置3的喷头与人眼前部巩膜组织相对应,并利用喷头喷出
微空气脉冲,诱导人眼前部巩膜组织形变,该形变信息能以弹性波的形式传播至后极部巩膜。微空气脉冲通常通过倾斜入射方式,避免微空气脉冲喷头遮挡oct扫描光束,进一步的,微空气脉冲垂直作用于前部巩膜组织,能够提高组织激发效率,使前部巩膜组织的形变信息能以弹性波的形式传播至后极部巩膜,且微空气脉冲作用于前部巩膜组织的激励位点与oct光束b扫描模式方向共线,减小由于弹性波传播方向与oct扫描方向不一致所带来的测量误差。
[0074]
所述phs-ssoct装置2的采集信号、微空气脉冲发射装置3的触发信号以及扫描振镜驱动信号通过ni函数发生卡同步生成,使得图像采集与微空气脉冲发射同步。
[0075]
2、基于相位分辨多普勒算法和res-unet神经网络模型来提取后极部巩膜的形变信号。
[0076]
2.1获得复数信号
[0077]
对phs-ssoct装置采集的时间干涉信号进行快速傅里叶变换,得到以深度z为变量的复数信号,其计算公式为:s(z)=a(z)e
iφ(z)
,其中,a(z)为振幅信息,φ(z)为相位信息。
[0078]
2.2多普勒相位计算
[0079]
根据相邻两次a-line信号之间的相位变化推算得出多普勒频移fd,其计算公式为:
[0080]
其中,δφ为相邻两次a-line之间的相位差,t为相邻两次a-line之间的时间差;
[0081]
通过对相邻两条a-line进行互相关运算,计算得到相位差,其计算公式为:
[0082][0083]
基于多普勒效应,得到运动组织样品的相对速度v,其计算公式为:
[0084]
其中,λ0为扫频光源的中心波长,n为组织样品的折射率;
[0085]
最终得出相邻两条a-line之间的相对位移δd,其计算公式为:
[0086][0087]
由于oct系统光源的中心波长和组织折射率已知,因此oct系统的组织振动位移检测分辨率与oct系统的相位稳定性成正比。
[0088]
2.3图像分割
[0089]
基于res-unet神经网络模型实现脉络膜和后极部巩膜间边界的自动分割,res-unet神经网络包含下采样路径和上采样路径,下采样路径用于负责图像信息的卷积编码,实现不同层次高维特征的提取,上采样路径用于负责图像信息的反卷积操作,负责高维特征的解码和图像维度重建工作,最终输出分割结果。
[0090]
res-unet神经网络模型是将手工标记后极部巩膜上下边界的眼底oct图像作为res-unet神经网络模型训练和验证集,模型输出结果和实际结果的差值可以构建残差矩
阵,将残差矩阵沿着res-unet神经网络模型依次向后传递,从而依次调整网络中的参数,使残差矩阵达到预期最小值。
[0091]
由于眼底组织结构层次丰富,除了后极部巩膜组织外,还存在视网膜和脉络膜组织。其中脉络膜组织与后极部巩膜组织相邻,其分界线不明显,难以通过传统的图像分割算法来自动准确获取后极部巩膜与脉络膜的边界,从而影响后极部巩膜内部弹性波信号的提取,基于res-unet神经网络的后极部巩膜自动分割模型,可准确提取后极部巩膜的弹性波信号,为后续力学性能测量提供基础。
[0092]
3、利用兰姆波模型计算后极部巩膜的弹性模量。
[0093]
kelvin
–
voigt模型中组织弹性和粘性的关系公式如下:
[0094]
μd=μ1+ωξi,其中μd为粘弹性参数,μ1为剪切模量,ω为角频率,ζ为粘性系数,i为虚数;
[0095]
巩膜组织lamb波特征方程如下:
[0096]
其中k为波数,d为组织厚度的一半,α和β为中间参量;
[0097]
α、β和k可用如下公式表述:
[0098][0099][0100]
其中c1、c2和cp分别为组织压缩波速度、剪切波速度和相速度;
[0101]
c1和c2与剪切模量μ1存在的关系公式如下:
[0102][0103]
其中ρ为组织密度,λ为拉梅常量;
[0104]
拉梅常量λ与剪切模量μ1关系如下:
[0105]
其中υ为角膜组织的泊松比;
[0106]
弹性模量e与剪切模量μ1的关系如下:
[0107]
e=2(1+υ)μ1;
[0108]
通过上述公式,计算得到弹性模量和粘性系数。
[0109]
采用上述方案,利用非接触式的微空气脉冲发射装置来安全诱导人眼前部巩膜组织形变,并将形变信息以弹性波的形式传播至后极部巩膜,通过眼底高速phs-ssoct系统快速获取高清后极部巩膜图像,并基于相位分辨多普勒算法和res-unet神经网络模型来准确提取后极部巩膜的形变信号,并利用兰姆波模型计算后极部巩膜的弹性模量,可实现后极
部巩膜生物力学性能的非接触式定量评估,为活体人眼后极部巩膜弹性成像提供新途径,并为近视及青光眼等眼科疾病的早期预警研究提供新工具。
[0110]
各位技术人员须知:虽然本发明已按照上述具体实施方式做了描述,但是本发明的发明思想并不仅限于此发明,任何运用本发明思想的改装,都将纳入本专利专利权保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1