主控制臂收起方法、手术机器人、电子设备和存储介质与流程
本发明涉及手术机器人,特别涉及一种主控制臂收起方法、手术机器人、电子设备和存储介质。
背景技术:
1、手术机器人其设计理念是采用微创伤方式,精准地实施复杂的外科手术。手术机器人突破了人眼的局限,通过采用立体成像技术,将内部器官更加清晰的呈现给操作者,在原来人手伸不进的区域,机器人能完成360度转动、挪到、摆动、夹持,并避免抖动。采用手术机器人执行手术,创口小,出血少,恢复快,大大缩短了患者术后住院时间,患者术后的存活率和康复率也能明显提高,因此,手术机器人受到广大医患的青睐,已广泛应用于各种外科手术中。
2、手术机器人一般包括医生控制台和患者台车,其中,医生控制台由外科医生操作以产生并传输必要的信号;患者台车接收来自医生控制台的信号,以对患者进行实际操作。进一步地,医生控制台上安装有主控制臂,外科医生可以通过操纵主控制臂来控制安装于患者台车上的机械臂以及挂载于机械臂的末端的手术器械和内窥镜进行相应运动。
3、现有技术中的手术机器人中的主控制臂在断电状态下只能在平衡位置附近保持重力平衡,断电后容易发生掉落,从而导致主控制臂发生碰撞,易使得主控制臂上的机械部件及电气部件发生损坏。此外,现有技术中,只能通过手动调整的方式收起主控制臂,非常耗时且不方便。
4、需要说明的是,公开于该发明背景技术部分的信息仅仅旨在加深对本发明一般背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现思路
1、本发明的目的在于提供一种主控制臂收起方法、手术机器人、电子设备和存储介质,可以自动将主控制臂收起至平衡位置,从而避免主控制臂在断电后易发生掉落的问题。
2、为达到上述目的,本发明提供一种主控制臂收起方法,包括:
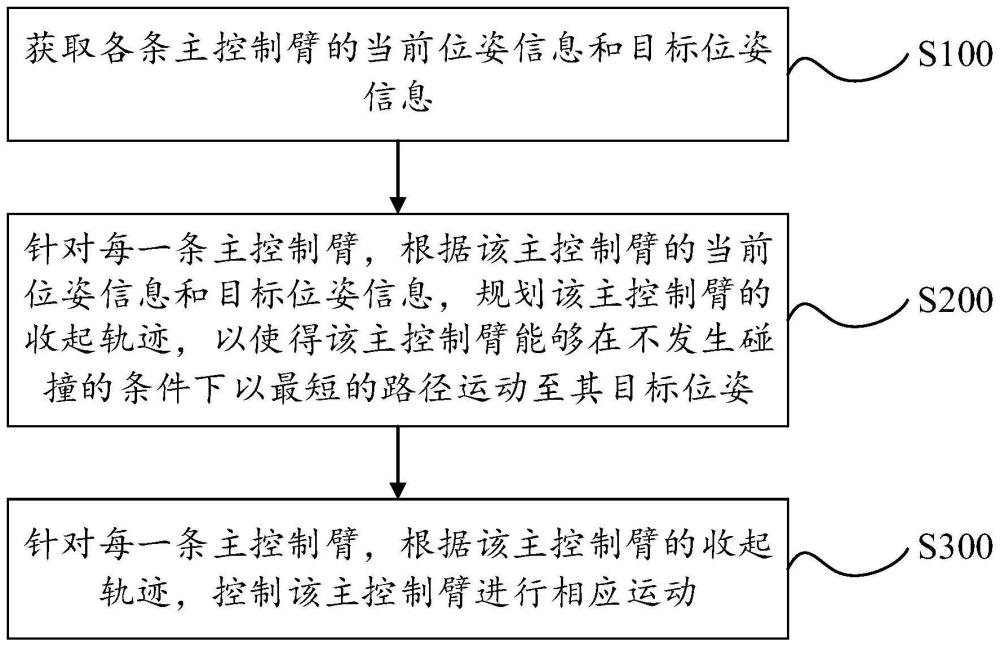
3、获取各条主控制臂的当前位姿信息和目标位姿信息;
4、针对每一条主控制臂,根据该主控制臂的当前位姿信息和目标位姿信息,规划该主控制臂的收起轨迹,以使得该主控制臂能够在不发生碰撞的条件下以最短的路径运动至其目标位姿;
5、针对每一条主控制臂,根据该主控制臂的收起轨迹,控制该主控制臂进行相应运动。
6、可选的,所述方法还包括:
7、获取每一条所述主控制臂的各个关节的包围盒模型;
8、所述针对每一条主控制臂,根据该主控制臂的当前位姿信息和目标位姿信息,规划该主控制臂的收起轨迹,以使得该主控制臂能够在不发生碰撞的条件下以最短的路径运动至其目标位姿,包括:
9、针对每一条主控制臂,根据该主控制臂的当前位姿信息、目标位姿信息以及每一条所述主控制臂的各个关节的包围盒模型,规划该主控制臂的收起轨迹,以使得该主控制臂能够在不发生碰撞的条件下以最短的路径运动至其目标位姿。
10、可选的,所述方法还包括:
11、针对每一条主控制臂,确定该主控制臂所对应的目标静态障碍物;
12、所述针对每一条主控制臂,根据该主控制臂的当前位姿信息和目标位姿信息,规划该主控制臂的收起轨迹,以使得该主控制臂能够在不发生碰撞的条件下以最短的路径运动至其目标位姿,包括:
13、针对每一条主控制臂,根据该主控制臂的当前位姿信息、目标位姿信息、每一条所述主控制臂的各个关节的包围盒模型以及该主控制臂所对应的目标障碍物的包围盒模型,规划该主控制臂的收起轨迹,以使得该主控制臂能够在不发生碰撞的条件下以最短的路径运动至其目标位姿。
14、可选的,所述确定该主控制臂所对应的目标静态障碍物,包括:
15、根据该主控制臂的各个关节的可运动范围,获取该主控制臂的工作空间信息;
16、针对每一个静态障碍物,根据该静态障碍物的位姿信息和几何信息,判断该静态障碍物是否至少部分位于该主控制臂的工作空间内,若是,则将该静态障碍物确定为该主控制臂的目标静态障碍物。
17、可选的,所述针对每一条主控制臂,根据该主控制臂的当前位姿信息和目标位姿信息,规划该主控制臂的收起轨迹,以使得该主控制臂能够在不发生碰撞的条件下以最短的路径运动至其目标位姿,包括:
18、针对每一条主控制臂,根据该主控制臂的当前位姿信息、目标位姿信息和工作空间信息,采用马尔科夫决策过程算法规划该主控制臂的收起轨迹,以使得该主控制臂能够在不发生碰撞的条件下以最短的路径运动至其目标位姿。
19、可选的,所述采用马尔科夫决策过程算法规划该主控制臂的收起轨迹,包括:
20、构建该主控制臂的马尔科夫决策过程模型,并采用最小二乘策略迭代算法求解所述马尔科夫决策过程模型,以得到该主控制臂的收起轨迹,其中,在求解所述马尔科夫决策过程模型的过程中,以该主控制臂在不发生碰撞的条件下以最短的路径运动至其目标位姿为目标。
21、可选的,所述根据该主控制臂的收起轨迹,控制该主控制臂进行相应运动,包括:
22、根据该主控制臂的收起轨迹,确定该主控制臂的各个关节的运动轨迹;
23、针对该主控制臂的每一个关节,控制该关节按照其运动轨迹进行相应运动。
24、可选的,所述控制该关节按照其运动轨迹进行相应运动,包括:
25、根据该关节的运动轨迹,确定该关节的目标速度曲线;
26、根据该关节的目标速度曲线,控制该关节按照其运动轨迹进行相应运动。
27、可选的,在获取各条主控制臂的当前位姿信息和目标位姿信息之前,所述方法还包括:
28、针对每一条主控制臂,判断该主控制臂的各个关节是否均处于工作状态,若否,则发送该主控制臂收起失败的提示信息。
29、可选的,所述方法还包括:
30、针对每一条主控制臂,在控制该主控制臂运动至其目标位姿的过程中,发送该主控制臂正在收起的提示信息。
31、为达到上述目的,本发明还提供一种手术机器人,所述手术机器人包括至少一条主控制臂,所述控制器与所述主控制臂通信连接,所述控制器配置为实现上文任一项所述的主控制臂收起方法。
32、为达到上述目的,本发明还提供一种电子设备,包括处理器和存储器,所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现上文任一项所述的主控制臂收起方法。
33、为达到上述目的,本发明还提供一种可读存储介质,所述可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时,实现上文任一项所述的主控制臂收起方法。
34、与现有技术相比,本发明提供的主控制臂收起方法、手术机器人、电子设备和存储介质具有以下优点:
35、本发明提供的主控制臂收起方法通过先获取各条主控制臂的当前位姿信息和目标位姿信息;再针对每一条主控制臂,根据该主控制臂的当前位姿信息和目标位姿信息,规划该主控制臂的收起轨迹,以使得该主控制臂能够在不发生碰撞的条件下以最短的路径运动至其目标位姿;最后针对每一条主控制臂,根据该主控制臂的收起轨迹,控制该主控制臂进行相应运动。由此,本发明提供的主控制臂收起方法能够在所述主控制臂不发生碰撞的情况下,自动将所述主控制臂收起至机械稳定平衡位姿(即目标位姿),从而不仅可以避免所述主控制臂在断电后容易发生掉落的问题,同时也可以有效防止所述主控制臂在收起至目标位姿的过程中因发生碰撞而导致主控制臂发生损坏的问题。此外,由于本发明提供的主控制臂收起方法能够自动将所述主控制臂收起至机械稳定平衡位姿(即目标位姿),因此相比于人工手动收起的方式,本发明提供的主控制臂收起方法更加省时便利。另外,由于本发明提供的主控制臂收起方法能够自动将所述主控制臂收起至机械稳定平衡位姿(即目标位姿),由此可以简化主控制臂的重力配平的要求,降低了主控制臂的结构设计的复杂度,从而可以达到使主控制臂轻量化易操控的需求。
36、由于本发明提供的手术机器人、电子设备和存储介质与上文所述的主控制臂收起方法属于同一发明构思,因此本发明提供的手术机器人、电子设备和存储介质具有上文所述的主控制臂收起方法的所有优点,故在此不再对本发明提供的手术机器人、电子设备和存储介质所具有的有益效果一一进行赘述。
- 还没有人留言评论。精彩留言会获得点赞!