用于辅助主动按压减压CPR的系统和存储介质的制作方法
用于辅助主动按压减压cpr的系统和存储介质
1.本技术是申请日为2016年09月16日,申请号为201680055019.3、发明名称为“以胸部顺应性为指导的胸外按压”的发明专利申请的分案申请。
技术领域
2.本发明涉及心脏复苏领域,并且特别地涉及用于辅助救援人员在心肺复苏(cpr)期间进行胸部的主动按压和减压(decompress)的装置。
背景技术:
3.在世界范围内,心脏骤停是死亡的主要原因,并且是包括心脏病和严重创伤的各种状况的结果。在心脏停止的情况下,为了提高患者的生存机会,有几项措施被认为是必要的。必须尽快采取被称为心肺复苏(cpr)的这些措施,以至少部分恢复患者的呼吸和血液循环。cpr是治疗性干预的集合,其被设计为经由对患者的外表面(例如,胸廓、腹部、腿)的外部操纵来提供血液流动,并且通常经由将外部氧气和其它气体输送至患者的肺部来向患者的血液供氧。大约30年前开发的一种常用技术是胸外按压。
4.cpr期间的胸外按压用于通过维持血液循环和氧气输送直到心脏恢复跳动,来机械地支持心脏停止对象内的循环。救援人员理想地以根据医疗指南(例如,美国心脏协会(aha)指南)的按压速率和深度来按压受害者的胸部。其它关键的胸外按压参数是减压速度或释放速度、以及按压阶段和减压阶段的占空比。
5.传统的胸外按压由救援人员通过使患者仰卧、将救援人员的两只手放在患者的胸骨上、然后利用所施加的向下力在前后(anterio-posterior)方向上朝向患者的脊柱向下按压胸骨区域来进行。然后,救援人员将手向上抬起并从患者的胸骨区域释放,并且胸部能够通过自然弹力而扩张,以引起患者的胸壁扩张。然后,救援人员以足以产生足够的血流的速率以循环重复的方式重复该向下-向上运动。按压的向下阶段通常被称为按压阶段。按压循环的向上行进的部分通常被称为释放阶段或减压阶段。
6.用于创建通过心脏的血流的一个关键步骤是在每次胸外按压之后充分释放胸部。应当充分释放胸部以增强胸腔内的负压,从而促进心脏的心室的静脉充盈并且增加下一胸外按压期间可供分布的血量。如果胸部未得到充分释放,则静脉回流和右心房充盈将受到阻碍。
7.为了使救援人员正确地提供胸外按压,能够向救援人员提供使得救援人员能够调整其按压的各方面以向患者提供最佳护理的实时反馈是有益的。诸如zoll medical realcprhelp(马萨诸塞州切姆斯福德市)等的系统使用加速度计或其它运动传感器来测量患者胸骨的运动,并且提供诸如上述等的与胸外按压参数有关的实时反馈。胸骨运动还被存储在监测装置(除颤器或甚至智能电话、智能手表等)中,以供救援人员或其它医疗人员查看。一些系统仅使用力传感器,通过假定患者的胸部顺应性的一些标称值并根据所测量到的力计算估计位移,来估计胸外按压运动参数。
8.为了增加胸外按压引起的心肺循环,开发了被称为主动按压-减压(acd)的技术。
根据acd技术,在救援人员的手和患者的胸骨之间插入敷贴器(applicator)本体,其中该敷贴器本体进一步经由(一个或多个)吸盘或自粘垫而被贴附。在按压阶段期间,与标准胸外按压相同,救援人员压抵敷贴器垫以按压患者的胸骨。与在释放阶段期间胸部被动地返回其中立位置的标准胸外按压不同,在acd中,救援人员在释放或减压阶段期间主动地向上拉起。与标准胸外按压相比,该主动向上拉起或主动减压提高了释放速度并得到增高的胸内负压,并且引起从患者的外周静脉脉管系统流入心脏和肺的增强的静脉血。在美国专利5,454,779和美国专利5,645,552中描述了用于对患者进行acd的装置和方法。
9.在acd胸外按压期间,患者的胸骨通常在减压阶段期间被向上拉起到超过胸骨的中立位置,其中“中立”被定义为在救援人员没有施加向上或向下的力时胸骨的稳定状态位置。如以下将针对图3所述,按压阶段和减压阶段的运动都将具有这样的部分,即在所述部分期间胸骨被向上拉起到超过中立位置,这被称为“抬升(elevated)”阶段。因而,存在4个阶段:按压:抬升(ce)、按压:非抬升(cn)、减压:抬升(de)、减压:非抬升(dn)。能够向救援人员提供关于主动按压减压循环的这些不同阶段的实时反馈是有益的。
10.在复苏术的时程内,由于施加于胸壁的重复力(有时需要超过100lbs(磅)的力来使胸骨充分位移从而产生充足的血流)以及由此产生的重复运动,患者的胸壁将“重塑”。随着胸骨/软骨/肋骨生物力学系统大幅弯曲和受压,胸部顺应性通常将显著增加。因而,使胸骨位移到适当的按压深度和减压深度所需的力的量也将显著改变。在胸壁重塑的过程中,前后直径(胸骨和脊柱之间的距离)也将频繁地大幅改变,这意味着中立位置在复苏过程中将改变。在复苏过程期间始终需要中立位置的准确度量;因而,在复苏开始时进行初始位置测量并且在复苏过程中假定恒定的中立位置将不足以生成按压循环的ce阶段、cn阶段、de阶段和dn阶段的运动参数的准确估计。例如,能够彼此独立地测量在de阶段和cn阶段期间所提供的运动参数和力并且排除ce阶段和dn阶段是特别有价值的。
11.一些acd系统使用插入在救援人员的手和患者的胸骨之间(在此处正提供按压)的力传感器,以监测胸外按压的松弛阶段。然而,胸外按压所用的胸骨力既不与血流量相关,也不与胸骨运动或胸壁动力学相关。由于个体患者的胸部的顺应性的变化很大,因此各患者需要独特量的力来实现对胸骨和心肺系统的相同按压。此外,力传感器通常不能测量(作为用于掌握所提供的胸外按压的质量和静脉回流量的关键参数的)胸骨的运动。
12.利用诸如加速度计等的运动感测系统的其它胸外按压监测系统(例如,zoll medical realcprhelp(马萨诸塞州切姆斯福德市))能够测量诸如速度和位移等的运动参数。然而,由于提供acd按压的方式,现有系统在区分抬升阶段的运动和非抬升阶段的运动的能力方面是有限的。
技术实现要素:
13.除其它方面,在一个方面中,描述了一种用于辅助心肺复苏(cpr)的系统。该系统包括:至少一个传感器;以及一个或多个处理器,其被配置用于基于从所述至少一个传感器接收到的数据来计算胸部顺应性关系;以及至少部分地基于所述胸部顺应性关系的特征来确定胸外按压的中立位置。该系统可以采用主动按压-减压装置的形式。
14.该系统具有多个优点。例如,该系统可以(例如,在用户界面上)提供使得救援人员能够获悉他或她正施予的cpr治疗的有效性的反馈。然后,救援人员可以在cpr治疗期间调
整他或她正在施加的力,并且接收确认该调整是否正提高治疗的有效性的反馈。根据实现方式,该反馈可以由cpr装置提供,或者被发送至位于cpr装置的外部的第二装置。这样,在复苏受害者时cpr治疗更有可能是有效的,并且cpr治疗较不可能对受害者造成损伤。
15.在以下的附图和说明书中陈述了一个或多个实现的详情。通过说明书和附图以及权利要求书,其它特征、目的和优点将显而易见。
附图说明
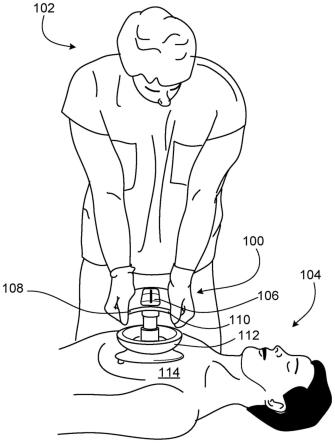
16.图1示出辅助用户对患者进行主动按压-减压(acd)cpr的装置。
17.图2表示患者的胸部形状的变化。
18.图3表示cpr期间所记录的信号。
19.图4是图1所示的acd装置的组件的框图。
20.图5示出包括胸部顺应性曲线的示例曲线图。
21.图6a和图6b示出刚度曲线的曲线图。
22.图7示出包括形成滞后回线的胸部顺应性曲线的示例曲线图。
23.图8示出用户界面的示例。
24.图9示出胸外按压循环的状态转变图。
25.图10示出胸部重塑的趋势曲线图。
26.图11是示例计算机系统的框图。
27.各图中相同的附图标记指示相同的元件。
具体实施方式
28.图1示出辅助用户102对正被从心脏事件中抢救的患者104进行主动按压-减压(acd)cpr的装置100。装置100包括用户界面106,其用于向用户102(有时称为救援人员)提供与用户102正施予的cpr的有效性有关的反馈。该反馈是部分基于与如由装置100(有时称为acd装置)测量到的患者104(有时称为受害者)的胸部顺应性有关的信息来确定的。
29.胸部顺应性是胸部吸收所施加的力并响应于该力而改变形状的能力的度量。在cpr的背景下,可以使用与胸部顺应性有关的信息来确定能够如何以在对患者进行复苏时有效的方式向患者的胸部施加力。理想地,施加到患者的力将足以在心脏内创建引起血液流动的真空。然而,如果该力不足以产生该真空,则cpr将不会有效,并且患者将死亡或以其它方式恶化。此外,如果力没有被正确地施加或者过大,则患者可能受伤。可以通过确定胸外按压的中立位置并且使用与cpr治疗的施予有关的信息来增强提供至用户102的反馈,从而向用户102给出将提高crp治疗的成功机会的指导。
30.可以通过本文所述的方法来确定中立位置的定位或其它阶段转变点。中立位置还可被视为救援人员在acd按压期间所施加的力或压力为零的位置。由于在胸外按压期间发生的所谓的胸部重塑,该零力的中立位置在复苏努力的过程中可能改变,这是因为在多次按压循环之后患者的前/后直径将减小。可选地,中立位置的定位可以仅是胸外按压启动之前的胸骨的初始位置。
31.在一些实现方式中,装置100确定(例如,计算)胸部顺应性关系,然后该胸部顺应性关系被用于确定向用户提供何种反馈。例如,装置100可以计算与胸部顺应性有关的诸如
位移和力等的两个变量之间的数学关系。然后,装置100可以识别该关系的可用于确定与cpr治疗有关的信息的一个或多个特征。一旦确定了与cpr治疗有关的信息,装置100就可以确定向用户提供何种反馈,例如与cpr治疗的进度有关的反馈、与胸外按压循环的非抬升部分时的胸外按压深度有关的反馈、或者与胸外按压循环的抬升部分时的力有关的反馈。
32.在一些示例中,与cpr治疗有关的信息可以包括与患者有关的信息,诸如胸外按压的中立位置等。在一些实现方式中,胸部顺应性关系可被视为或表示为曲线,例如表示该关系的曲线图的曲线。在一些实现方式中,胸部顺应性关系可被存储为数据,例如测量值(例如,多个时间索引处的位移和力的值)的表等。
33.如图1所示,装置100具有用户102把持以施加力的手柄108、110。装置100还具有有助于保持装置100与患者104的胸部114相接触的吸盘112。在用户使用装置100施加向上力的情况下,由于吸盘112的吸引,作为响应,患者的胸部114将被向上拉起。该向上力在cpr治疗的释放阶段期间在患者的胸腔内创建负压。以这种方式创建负压的装置有时被称为阻抗阈值装置(itd)。
34.在一些示例中,例如在用户界面106上向用户102给出的反馈对用户102使用装置100按压胸部的方式向用户进行指导。例如,用户界面106可以包括按压循环的向上部分和向下部分的有效性的视觉指示。反馈所能提供的参数包括按压深度和按压释放速度。这样,用户102能够响应于反馈来调整其按压活动的各要素。
35.作为现实世界的示例,用户界面106可以显示示出向上力或向下力是否过强或者是否不够强的曲线图,然后用户102可以相应地进行调整。例如,如果装置100确定为按压阶段的深度不足以进行有效的cpr治疗,则装置100可以显示表示向下运动的深度不满足有效性阈值的反馈。在一些实现方式中,装置100可以基于对患者104的胸外按压的中立位置的估计来确定向上力或向下力是否过强或是否不够强。患者104的胸外按压的中立位置用作一拐点,其中该拐点可用于将向上行程的胸部运动与向下行程的胸部运动区分开,并且生成针对按压循环的ce阶段、cn阶段、dn阶段和de阶段的具体测量值。
36.由于用户102手动地提供按压,因此这里所示的acd装置100是手动acd装置的示例。可以将其它类型的机械acd装置用于以下所述的技术、例如确定胸外按压的中立位置的技术。尽管这里所示的acd装置100包括手柄和吸盘,但用于以下所述的技术的其它类型的acd装置无需包括这些元件。例如,其它类型的acd装置可以包括被配置为贴附至患者身体的表面的第一元件、以及被配置为连接至救援人员的手的第二元件。在这些示例中,第一元件允许在维持与患者身体表面相接触的同时,在患者身体表面上向上拉起。此外,在这些示例中,第二元件使得救援人员能够推按胸部和拉起胸部。
37.吸盘和手柄分别是所述第一元件和所述第二元件的示例,但不是这些元件的可以使用的唯一类型。例如,第一元件可以包括一个或多个多吸盘组件,或者第一元件可以是被贴附至患者的胸部的粘合剂(例如,粘性凝胶)部分或完全覆盖的表面,或者第一元件可以是这些物品的任意组合。在标题为“method and device for performing alternating chest compression and decompression”的美国专利8,920,348中描述了多吸盘组件的示例(通过引用而全部并入本文)。代替上述的手柄或者除上述的手柄外,第二元件可以包括将救援人员的手紧紧地保持在acd装置上的一个或多个带或支架。
38.图2表示在使用acd装置进行acd cpr时患者104的胸部200的形状变化。由于人类
的胸部不是刚性的,因此胸部的形状将响应于所施加的力而改变。在cn阶段中胸骨被向下按压202的情况下,胸部200趋于表现出在前后(ap)维度206上被压缩并且在横向维度208上延伸的形状204。该形状204有时被称为按压形状。在de阶段210期间,胸部200趋于表现出在ap维度206上延伸并且在横向维度208上变窄的形状212。该形状212有时被称为减压形状。在没有向上或向下施加力的情况下,胸部200表现出与胸外按压的中立位置相对应的形状214。换句话说,形状214与在胸部的形状基本上不受例如在cpr胸外按压期间所施加的力影响的情况下胸部的中立位置相对应。
39.胸部顺应性是对由于所施加的力而改变形状的该趋势的数学描述。胸部顺应性是刚度的倒数。胸部顺应性是特定时刻处的深度增量变化除以力的增量变化。在胸外按压循环的情况下,如图3所示,可以利用横坐标上的时间来标绘顺应性,或者可选地,如图5和图6所示,可以将顺应性标绘为具有深度作为独立变量以及在回线轨迹中所暗示的时间变量的回线。如果患者的胸部响应于力的特定变化而表现出相对小的形状变化,则患者的胸部顺应性相对较低。作为对比,如果患者的胸部响应于力的特定变化表现出相对较高的形状变化,则患者的胸部顺应性相对较高。另外,由于在向下按压和向上拉起胸部时的位置/构象变化所引起的胸腔的结构变化,在胸部被按压时胸部顺应性改变。以下针对图5和图7来进行说明。例如,在向下按压胸部时,随着胸部接近其柔韧性的极限(例如,区域508或者图7的曲线右侧的平坦区域),胸部的顺应性下降。
40.针对系统进行位移测量的各时间点n,还进行力测量,得到针对各样本时间n的位移/力矢量对[dn,fn]。通常,与参考时间点相比,顺应性c等于位移的变化除以压力的变化:c=δd/δp。
[0041]“瞬时顺应性”(ic)是指参考时间点t0邻近或几乎邻近时间点tn时的顺应性,因而在更大程度上是特定时间点处位移-力曲线的斜率的度量。例如,参考时间点t0可以是紧挨在时间tn之前的采样时间点。例如,使用本领域技术人员已知的移动平均、加权移动平均或低通滤波器,可以在紧挨在时间tn之前的多个样本点上组成参考时间点。在参考时间点和时间tn之间可能存在例如1秒以下的小的时间间隙。在一些版本中,参考时间点可被选择为区段的开始,例如图6b中的斜率1的按压的开始(按压的第一区段,因而区段的开始也是按压的开始)、或者针对同一图中的斜率2的参考时间t0的虚线的开始。
[0042]
瞬时顺应性incn=|(d
n-dr)/(p
n-pr)|
[0043]
其中:incn是时间点tn处的距离/压力曲线的斜率的估计;dn是时间tn处的位移;p
p
是时间tn处的压力;并且dr和pr分别是参考时间tr处的距离和压力。
[0044]
另一方面,“绝对顺应性”(ac)是指参考点t0使用一组胸外按压的开始时的绝对参考(例如压力和位移等)。在cpr期间,可能存在作为提供胸外按压的约1~3分钟的时间段的所谓的胸外按压的“轮次”,然后在该时间段结束时,按压中止并且可以进行各种其它治疗动作,诸如分析患者ecg、提供除颤电击或者提供诸如肾上腺素或胺碘酮等的药物等。因而,为了确定ac,参考点t0在胸外按压的任何轮次开始之前、包括在第一轮按压之前,即考点t0在cpr开始时。在多数实例中,在该时间点处压力将为零,并且将利用位移估计软件将位移有效地校准为零。可以根据按压位移和相关的按压压力来估计胸部的绝对顺应性。参考压力“p
0”是时间t0处的压力,并且胸部位移“d
0”是时间t0处的位移。压力“p
n”是实现位移“d
n”所需的压力。根据以下等式来估计胸部顺应性:
[0045]
绝对顺应性=|(d
p
–
d0)/(p
p
–
p0)|
[0046]
其中:d
p
是按压峰值处的位移,并且p
p
是按压峰值处的压力。
[0047]
可以利用装置100中的传感器216a~216c来测量胸部200的顺应性和按压深度。例如,可以使用力传感器216a以及诸如加速度计216b等的运动传感器。在一些实现方式中,力传感器216a和加速度计216b配置在装置100的壳体218中。加速度计感测cpr期间胸部的运动,并且力传感器测量所施加的力或压力。对加速度计信号进行积分以确定壳体218的位移,并且将力传感器的输出转换成标准的压力单位或力单位。
[0048]
在一些实现方式中,加速度计在单独的壳体(例如放置在患者胸骨上的壳体)内,并且力传感器在例如装置100的壳体218的壳体内。在这种实现方式中,容纳加速度计的壳体和具有力传感器的装置可被配置成在cpr期间附接或连接。
[0049]
在一些实现方式中,可以使用多个加速度计216b、216c。例如,可以将第二加速度计216c放置在吸盘112的内周或附近的患者胸骨上。第二加速度计可以容纳在诸如zoll cpr stat-padz(马萨诸塞州切姆斯福德市)等的自粘泡棉的单独组件中。这样,第一加速度计216b趋于测量救援人员的手102(图1)所经历的加速度,并且第二加速度计216c趋于测量患者的胸骨104的加速度。换言之,第一加速度计216b可被配置为测量源于所施加的向上力的移动,例如由于第一加速度计216b靠近或以其他方式机械地连接至吸盘112,因此其提供对于吸盘112在患者的胸骨上拉起时所施加的力的适当表示。此外,第二加速度计216c可以测量源于所施加的向下力的移动,例如由于第二加速度计216c靠近或以其他方式机械地连接至装置100的手柄,因此第二加速度计216c提供对于救援人员的手所施加的向下力的适当表示。这样,系统可以检测acd装置与患者的胸骨之间的贴附是否不充分,并且警告救援人员将acd装置重新应用至患者的胸部。
[0050]
图3表示在cpr期间例如使用图2所示的传感器214a~214c所记录的信号。尽管可以使用绝对顺应性来确定中立位置,但inc将提供对中立位置的更准确的度量。
[0051]
可以根据位移信号来检测按压(c1~c5)。根据按压之间的间隔(例如,(c2的时间-c1的时间))来计算按压速率,并且测量从按压开始至峰值位移(例如,(d1~d0))的按压深度。针对各按压保存开始按压值和峰值按压值。使用按压开始和结束时的压力来确定用于实现给定按压深度的力。
[0052]
在2007年5月22日发布的标题为“method and apparatus for enhancement of chest compressions during cpr”的美国专利7,220,235中进一步说明了胸部顺应性,并且其全部内容通过引用并入本文。可以经由如美国专利8,862,228、美国专利6,827,695和美国专利6,390,996(通过引用而全部并入本文)中所述的方法来估计按压速度和位移。
[0053]
图4是图1所示的acd装置100的组件的框图。该装置包括处理器400,例如诸如微处理器等的电子组件,其中该微处理器用于执行指令,例如处理输入数据以生成输出数据,并且相对于装置100的其它组件来通信数据。例如,处理器400从诸如力传感器402等的传感器和诸如加速度计404a、404b(或者,在一些实现方式中为单个加速度计)等的运动传感器接收信号。其它类型的运动传感器可以包括诸如上述的美国专利7,220,235中所述的基于磁感应的系统。
[0054]
处理器400还将输出信息406通信到用户界面模块408。输出信息406表示cpr治疗的有效性,并且由处理器400部分地基于从传感器(例如,力传感器402和加速度计404a、
404b)接收到的信号来确定。
[0055]
用户界面模块408可以采取多个形式其中之一。在一些实现方式中,用户界面模块408是软件和硬件的组合,并且包括向装置100的用户呈现信息的显示器。例如,所呈现的信息可以包括文本信息以及诸如曲线图和图表等的图形信息。用户界面模块还可以包括诸如输入装置(例如,按钮、键等)的其它组件。在一些实现方式中,用户界面模块包括音频输入/输出元件,例如麦克风、扬声器和音频处理软件。
[0056]
在一些实现方式中,用户界面模块408使用户界面出现在外部装置412(例如,能够独立于acd装置100进行工作的装置)上。例如,外部装置可以是智能电话、平板计算机或另一移动装置。外部装置还可以是除颤器(诸如zoll medical corp x系列除颤器(马萨诸塞州切姆斯福德市)等),其具有内置于除颤垫(cpr stat-padz)中的加速度计;或者可以是包含附着至患者的胸骨并且主要测量患者的胸骨的运动的运动传感器的其它自粘组件。该组件可以或者可以不与除颤电极集成。除颤器可以从acd装置接收加速度或运动数据并比较acd传感器的运动,并且将该运动与来自除颤垫或其它附着的胸骨运动感测组件中的加速度计的加速度计信息或运动信息进行比较。例如如果特别是在按压循环的减压阶段期间发现这两个运动相差大于0.25英寸,则可以提示救援人员重新应用acd装置。
[0057]
在一些实现方式中,外部装置412使用诸如bluetooth(蓝牙)等的无线通信技术与acd装置100进行通信。在该示例中,acd装置100具有无线通信模块410。例如,用户界面模块408可以使用无线通信模块410相对于外部装置412通信信号。尽管这里使用bluetooth作为示例,但还可以使用诸如wifi、zigbee、802.11等的其它无线通信技术。
[0058]
在一些实现方式中,处理器400可以例如使用以上针对图2所述的等式来进行计算,以确定对胸部顺应性的估计414。
[0059]
在一些实现方式中,处理器400可以进行计算,以确定在两次按压之间患者的胸部是否基本被释放(即,充分释放以在胸部中创建促进心脏的静脉充盈的压力)。用户界面模块408可以使装置100的用户界面106(图1)显示向用户102(图1)给出指导或其他反馈的消息,例如从而在按压之间更完全地释放胸部以及/或者在按压期间更用力地推按胸部。
[0060]
处理器400还可以例如基于诸如胸外按压的估计深度和对胸部顺应性的估计414等的数据来计算胸外按压的估计中立位置416。该计算可以至少部分地基于如以下针对图5和图6更详细地所述的顺应性关系的特征。
[0061]
输出信息406可以包括基于胸部顺应性的估计414和胸外按压的中立位置416所确定的信息。例如,输出信息406可以包括诸如按压非抬升(cn)深度或减压抬升(de)高度等的信息。输出信息406还可以包括向用户的有关以提高cpr治疗的有效性的方式调整用户的动作的反馈。以下针对图7来说明示例。
[0062]
在一些实现方式中,处理器400将第一加速度计404a所接收到的信号与第二加速度计404b所接收到的信号进行比较。如以上针对图2所述,第一加速度计404a可以放置在acd装置100的壳体中或附近,并且第二加速度计404b可以放置在acd装置100的吸盘112中或附近。这样,第一加速度计216b趋于测量用户102(图1)所经历的加速度,并且第二加速度计趋于测量患者104所经历的加速度。在一些实现方式中,可以使用多个加速度计216b、216c。例如,第二加速度计216c可以放置在吸盘112的内周或附近的患者胸骨上。第二加速度计可以容纳在诸如zoll cpr stat-padz(马萨诸塞州切姆斯福德市)等的自粘泡棉的单
独组件中。这样,第一加速度计216b趋于测量救援人员的手102(图1)所经历的加速度,并且第二加速度计216c趋于测量患者的胸骨104的加速度。这样,系统可以检测在acd装置和患者的胸骨之间的粘贴是否不充分,并且警告救援人员将acd装置重新应用至患者的胸骨。
[0063]
在一些实现方式中,处理器400包括可以存储数据的存储器418或者可以访问存储器418。存储器418可以采用多个形式中的任意形式,并且可以与处理器400集成(例如,可以是同一集成电路的一部分),或者可以是与处理器400进行通信的单独组件,或者可以是这两者的组合。在一些实现方式中,在处理器400计算诸如胸部顺应性的估计414的值和胸外按压的中立位置416的值等的数据的同时,存储器418存储这些数据。在一些实现方式中,处理器400使用存储器418来存储数据以供随后检索,例如在施予cpr的期间存储数据以供随后在相同的施予cpr的期间检索,或者以供随后在不同的施予cpr的期间检索。
[0064]
图5示出包括胸部顺应性曲线502的示例曲线图500。在一些实现方式中,顺应性曲线502是由处理器400(图4)基于从传感器(例如,力传感器和/或(一个或多个)加速度计)接收到的输入所计算出的数据的表示。图5所示的曲线图500包括表示时间(例如,以秒为单位)的x轴和表示胸部顺应性的y轴。曲线502表现出正弦形状。这种顺应性曲线502有时被称为非滞后顺应性曲线。
[0065]
实际上,在救援人员正使用acd装置(例如,图1所示的装置100)对受害者进行cpr时,救援人员使向下力和向上力施加在受害者的胸部。在这些力使胸部的形状接近其自然极限时,受害者的胸部顺应性将最低。换句话说,在受害者的胸部被拉起或按下时受害者的胸部顺应性接近下限。在一些场景中,在胸部顺应性接近该下限时,表示已经达到了肋骨的抗拉强度,并且如果施加额外的力,则一个或多个肋骨的压裂风险升高。在该系统的一些版本中,可以以音频、视觉或触感/触觉提示的形式提供警告,以表示顺应性已经降低到某阈值水平以下。
[0066]
图6a示出胸骨影响的代表刚度曲线,并且图6b示出这些曲线的刚度区域。参考这些图,代表曲线的斜率是刚度(例如,顺应性的倒数)。各回线是针对不同对象的曲线。图6b中的斜率1是按压的cn阶段的刚度;这是较低的斜率值并且刚度较小(因而顺应性较高)。尽管如在该图的多个回线中所看到的,针对各对象,按压的cn阶段的斜率发生变化,但在几乎所有的情况下,在按压期间的某个拐点处,将存向第二更陡的斜率(顺应性更低且刚度更大)的斜率变化,如向斜率2的偏移所表示。
[0067]
在通过两条线(图中的斜率1和斜率2)的交点表示的拐点处,压裂风险仍相对较低。一旦检测到了拐点,该系统可以提示救援人员维持该按压深度,这是因为该按压深度仍在安全范围内。该患者特异的按压深度将有可能不同于aha/ilcor指南(例如大于2英寸)。例如,最初在复苏努力开始时,特别是对于老年患者(其使肋骨附着至胸骨的胸骨软骨已钙化和僵硬)而言,患者的胸部可能僵硬得多。如果救援人员要尝试并按aha/ilcor指南所推荐的深度来提供按压,则救援人员将有可能造成患者的肋骨骨折。实际上,在指南本身的陈述中,承认了肋骨骨折是使用现有的胸外按压方法的常见现象。“相对于因心脏停止而死亡,肋骨骨折和其它损伤是常见但可接受的cpr后果。”(源自于由american heart association于2005年1月23日至30日在德克萨斯州达拉斯市承办的2005international consensus conference on cardiopulmonary resuscitation and emergency cardiovascular care science with treatment recommendations)。除院内肋骨骨折的
不适之外,肋骨骨折的不良副作用是其会导致胸壁的回弹力降低并由此导致在减压阶段期间胸部的自然弹回减少,这导致静脉回流减少并且胸外按压效果降低。由于这些原因因而期望使肋骨骨折为最低限度或消除肋骨骨折。通过检测胸壁顺应性的变化并且作为这些检测的结果来提示救援人员,胸外按压深度将不会超过肋骨和胸骨的损伤阈值。
[0068]
由于在复苏努力的过程中胸部的中立位置以及整体顺应性发生变化,因此使用该方法,系统的实时提示引导救援人员进行的深度也将改变。在胸外按压启动之后的最初几分钟内发生已知为胸部重塑的现象。ap直径可以减小多达0.5~1英寸,并且随着胸骨软骨逐渐软化,胸壁的顺应性将增加。通过在胸骨逐渐软化时在各按压循环中以针对各个体患者定制的方式保持在安全极限内,降低了损伤,而且更重要的是,维持了胸壁的自然回弹力,并且向患者提供更高效的胸外按压。
[0069]
一般而言,用于检测斜率的变化的方法可以包括:确定ce阶段的斜率的初始统计特性,然后针对斜率任何明显、持续的增加来对斜率进行分析。例如,可以使用诸如basseville(basseville m,nikiforov iv.detection of abrupt changes:theory and application.engelwood,n.j.:prentice-hall 1993)或者pettitt(pettitt an,a simple cumulative sum type statistic for the change point problem with zero-one observations,biometrika 1980;67:79-84.)所述的变化点分析等的技术。可以采用诸如shewhart控制图等的其它方法,以首先检测斜率的变化,然后评估所检测到的变化是否是增加且具有足够的幅值,以向救援人员生成表示按压深度过深并且表示在将来按压中以某种方式按压不那么深的提示。在更为简单的版本中,在顺应性下降到低于具体按压开始时的初始顺应性值以下的一定百分比阈值(例如,顺应性降低了15%)的情况下,可以发起提示。可以在一个以上的按压阶段内对初始顺应性值求平均;该平均可以用作多个按压循环的比较值。
[0070]
在一些实施例中,可以对顺应性进行单独测试以确定de阶段和cn阶段(即,在按压循环的减压部分[dn阶段和de阶段]的顶部以及按压循环的按压部分[ce阶段和cn阶段]的底部)两者内的损伤风险。
[0071]
作为对比,在受害者的胸部在胸外按压的中立位置(通常与胸部的自然静止位置相对应)的情况下,胸部顺应性趋于处于其最高点。因而,在图5所示的曲线502中,与最高胸部顺应性相对应的点504、506(例如,正弦曲线的峰值)趋于与胸外按压的中立位置相对应。与此相对,与最低胸部顺应性相对应的点508(例如,正弦曲线的波谷)趋于与胸部的按压形状或减压形状的极限相对应。
[0072]
在一些实现方式中,处理器400(图4)可以使用非滞后顺应性曲线502的特征来计算胸外按压的中立位置的估计416(图4)。例如,处理器400可以使用曲线502的峰值504、506来计算胸外按压的中立位置的估计。
[0073]
图7示出包括形成滞后回线的胸部顺应性曲线602的示例曲线图600。这种顺应性曲线602有时被称为滞后顺应性曲线。在一些实现方式中,顺应性曲线502是由处理器400(图4)基于从传感器(例如,力传感器和/或(一个或多个)运动传感器,例如(一个或多个)加速度计)接收到的输入所计算出的数据的表示。图7所示的曲线图600包括表示深度(即,以厘米为单位)的x轴和表示胸部顺应性的y轴。该曲线上的箭头示出一个按压循环过程期间的时间进度,并且表示acd装置100(图1)的运动,例如,该曲线的具有指向右的箭头的部分
示出按压循环的按压部分(ce和cn)的瞬时顺应性(ic),并且曲线的具有向左的箭头的部分示出按压循环的减压部分(de和dn)的瞬时顺应性(ic)。例如,在acd装置100从高深度向低深度移动的情况下,胸部顺应性(随着胸部接近按压的中立位置而)增大然后(随着胸部在更大程度上被按压而)减小。然后,在acd装置100从其最低深度移动回高深度的情况下,胸部顺应性(随着胸部接近按压的中立位置而)再次增大然后(随着胸部在更大程度上减压而)再次减小。
[0074]
在一些实现方式中,处理器400(图4)可以使用滞后顺应性曲线602的特征来计算胸外按压的中立位置的估计416(图4)。可以使用多个特征其中之一。
[0075]
例如,可以使用滞后顺应性曲线602的交点604来估计胸外按压的中立位置416。该点604表示可以对应于胸外按压的中立位置的深度(例如,作为x轴的坐标)。
[0076]
作为另一示例,可以使用滞后顺应性曲线602的两个峰值614、616之间的大致半程的点612来估计胸外按压的中立位置416。例如可以是通过测量峰值614、616之间的距离610并且确定与距离610的中心相对应的点来确定点612。可选地,中立点可以是与距离610的预定义百分比相对应的点。
[0077]
作为另一示例,可以使用滞后顺应性曲线602的其它特征之间的大致半程的点606来估计胸外按压的中立位置416。例如,处理器可以识别滞后顺应性曲线602的针对顺应性具有相同值的两个点之间的距离608,然后可以通过确定与距离608的中心相对应的点来计算点606。
[0078]
图8示出用户界面700的示例。例如,用户界面700可以是图1所示的acd装置的用户界面106的示例。此外,用户界面700可以由图4所示的用户界面模块408来控制。
[0079]
用户界面700显示表示cpr治疗的有效性的信息702。以使得acd装置100(图1)的用户102能够有效地施予cpr治疗的方式显示信息702。
[0080]
信息702包括表示cpr治疗的de高度706和cn深度708的图704。该深度和高度由边界710分开。在一些实现方式中,de高度706和cn深度708由处理器400(图4)来确定。例如,可以使用(一个或多个)加速度计404a~404b的信息并且获知峰值高度和峰值深度以及中立位置的发生时间来计算de高度706和cn深度708。可选地,可以根据力传感器402(包括由处理器400确定的诸如胸部顺应性414是估计和胸外按压的中立位置416等的计算出的信息)来确定de高度和cn深度。可选地,显示反馈的de部分706或者cn部分708可以显示压力而不是位移的测量值。例如,在一个实施例中,de部分706可以显示压力或力(de力)的度量,而cn部分708可以显示位移(cn深度)的度量。
[0081]
参考图9,在一些示例中,可以使用状态转变图来基于按压方向(即,de或cn)的输入以及是否到达中立点416来确定按压循环的各阶段(例如,cn阶段、dn阶段、de阶段和ce阶段)。在检测到中立位置(np)的情况下,从ce阶段904转变为cn阶段902以及从dn阶段906转变为de阶段908。在转变为cn 902或de 908时,np被重置为0,即该转变是边缘敏感的。与方向有关的转变是水平敏感的。从cn 902向dn 906和从de 908向ce 904的转变发生在方向变化时。可以在获知按压阶段状态之间的转变的发生时间的情况下计算诸如速度、距离、平均速度、峰值速度等的描述运动的参数。在一些版本中,信息702还可以包括可显示的其它运动信息,诸如在减压阶段期间发生的速度等。更具体地,可以显示出现中立位置时的速度,或者可以以其他方式(例如,语气、言语等)将该速度通信给救援人员。可选地,通信给救援
人员的速度可以是减压阶段的明显部分(例如,抬升部分和非抬升部分)期间的运动的平均或其它统计表示。
[0082]
参考图8,曲线图704还包括de高度阈值指标712和cn深度阈值指标714。这些指标向装置的用户提供与de高度和cn深度这两者或其中任意一个是过浅还是过深有关的信息。例如,如果用户看见de高度706不满足阈值指标712,则用户可以调整他或她的运动以(例如,通过在de运动期间以更大的力拉起acd装置)增加de高度。同样,如果用户看见de高度指示符706超过阈值指标712,则用户可以调整他或她的运动以(例如,通过在de运动期间以更小的力拉起acd装置)减少de高度。如果用户看见cn深度708不满足阈值指标714,则用户同样可以在cn运动期间调整力。
[0083]
此外,信息702可以包括基于利用指标712、714表示的阈值而向用户显示的指导。例如,如果de高度或cn深度不在阈值的特定范围内(例如,比阈值大了10%以上或小了10%以上),则用户界面700可以显示指导用户的消息。在图8所示的示例中,cn深度指示符708表示cn深度远低于cn阈值指标714。作为响应,用户界面700向用户显示表示他或她应当更加用力地推按以达到最佳按压的消息718。如果de高度指示符706远低于其相应阈值,则可以(针对最佳减压)显示相似的消息。同样,如果de高度706或cn深度708超过其相应阈值很大量(例如,超过阈值指标10%以上),则用户界面700可以显示警告消息(例如,“减小cn力以避免损伤患者”)。
[0084]
可选地,与人员的手物理接触的组建中可以包括诸如所有蜂窝电话中所用的微型振动器,并且可以通信与正确的cn深度和de高度有关的触觉反馈,例如,在达到阈值的情况下进行振动。
[0085]
在图8所示的示例中,de高度指示符706接近de阈值指标712。因而,用户界面700显示表示用户正在对de运动使用适当量的力的消息718。
[0086]
在一些实现方式中,基于作为静态值的阈值来显示阈值指标712、714。例如,处理器400的存储器418(图4)可以存储例如基于与患者的de高度和cn深度有关的实验数据的静态值。可以直接使用静态值,或者可以利用针对正接收cpr治疗的患者所测量到的变量来修改这些值。
[0087]
在一些实现方式中,基于由处理器(例如,图4所示的处理器400)计算出的阈值来显示阈值指标712、714。在一些示例中,所计算出的阈值基于胸部顺应性的计算,例如图4所示的胸部顺应性的估计值414。例如,参考图7所示的顺应性曲线602,与胸部顺应性的最低值相对应的深度的值可以对应于最大de高度和最大cn深度。
[0088]
在一些实现方式中,用户界面700示出表示胸部重塑的趋势曲线图。例如,趋势曲线图可以表示在cpr治疗过程中患者的胸部发生了什么。图10示出可以显示在用户界面700上的趋势曲线图1000的示例。趋势曲线图1000的x轴1002表示时间并且y轴1004表示顺应性。如在该图的示例中所示,趋势曲线图1000可以包括零点趋势线1006(例如,表示患者的胸部的起始深度的趋势线)和顺应性趋势线1008。随时间的经过,如趋势曲线图所示,零点和顺应性随着cpr治疗的提供而改变。
[0089]
图11是示例计算机系统1100的框图。例如,参考图1,acd装置100可以是这里所述的系统1100的示例,外部装置412(图4)也可以是这里所述的系统1100的示例。系统1100包括处理器1110、存储器1120、存储装置1130以及一个或多个输入/输出接口装置1140。各个
组件1110、1120、1130和1140例如可以使用系统总线1150互连。
[0090]
处理器1110可以是图4所示的处理器400的示例,并且能够处理指令以在系统1100内执行。如这里所使用的术语“执行”是指程序代码使处理器执行一个或多个处理器指令的技术。在一些实现方式中,处理器1110是单线程处理器。在一些实现方式中,处理器1110是多线程处理器。在一些实现方式中,处理器1110是量子计算机。处理器1110能够处理存储在存储器120中或存储装置1130上的指令。处理器1110可以执行诸如以下等的操作:至少部分地基于顺应性曲线的特征来确定胸外按压的中立位置。
[0091]
存储器1120存储系统1000内的信息。在一些实现方式中,存储器1120是计算机可读介质。在一些实现方式中,存储器1120是易失性存储器单元。在一些实现方式中,存储器1120是非易失性存储器单元。
[0092]
存储装置1130能够向系统1100提供大容量存储。在一些实现方式中,存储装置1130是非暂时性计算机可读介质。在各种不同的实现方式中,存储装置1130例如可以包括硬盘驱动器、光盘驱动器、固态驱动器、闪速驱动器、磁带或者一些其它大容量存储装置。在一些实现方式中,存储装置1130可以是云存储装置,例如包括分布在网络上并且使用网络访问的一个或多个物理存储装置的逻辑存储装置。在一些示例中,该存储装置可以存储长期数据。输入/输出接口装置1140提供针对系统1100的输入/输出操作。在一些实现方式中,输入/输出接口装置1140可以包括以下中的一个或多个:网络接口装置(例如,图4所示的无线通信模块410或以太网接口)、串行通信装置(例如,rs-232)、以及/或者无线接口装置(例如,802.11接口、3g无线调制解调器、4g无线调制解调器等)。网络接口装置使得系统1100能够通信(例如,发送和接收)数据。在一些实现方式中,输入/输出装置可以包括被配置为接收输入数据并且将输出数据发送至其它输入/输出装置(例如,键盘、打印机和显示装置1160)的驱动器装置。在一些实现方式中,可以使用移动计算装置、移动通信装置和其它装置。
[0093]
参考图4,处理器400所执行的步骤可以通过指令来实现,其中这些指令在执行时,使一个或多个处理装置执行以上所述的处理和功能,例如确定与cpr治疗有关的信息。这些指令例如可以包括诸如脚本指令等的解释指令、或者可执行代码、或者计算机可读介质中所存储的其它指令。
[0094]
计算机系统100可以经由网络(诸如服务器群等)或一组广泛分布的服务器来以分布方式实现,或者可以在包括彼此协调地进行工作的多个分布式装置的单个虚拟装置中实现。例如,这些装置其中之一可以控制其它装置,或者这些装置可以根据一组协调规则或协议进行工作,或者这些装置可以以其它方式协调。多个分布式装置的协调操作呈现了作为单个装置进行工作的外观。
[0095]
在一些示例中,系统1100包含在单个集成电路封装内。这种系统1100(其中,处理器1110以及一个或多个其它组件都容纳在单个集成电路封装内和/或被制造为单个集成电路)有时被称为微控制器。在一些实现方式中,集成电路封装包括与输入/输出端口相对应的引脚,其中这些引脚例如可用于相对于输入/输出接口装置1140中的一个或多个输入/输出接口装置通信信号。
[0096]
尽管在图11中说明了示例处理系统,但以上所述的主题和功能操作的实现还可以在其它类型的数字电子电路中、或者在计算机软件、固件或硬件(包括本说明书所公开的结
构及其结构等同物)中、或者采用它们中的一个或多个的组合来实现。本说明书所述的主题的实现(诸如存储、维持或显示伪影等)可被实现为一个或多个计算机程序产品,即编码在有形程序载体(例如,计算机可读介质)上的计算机程序指令的一个或多个模块,以供由处理系统执行或者控制处理系统的操作。计算机可读介质可以是机器可读的存储装置、机器可读的存储基板、存储器装置、或者它们中的一个或多个的组合。
[0097]
术语“系统”可以包含用于处理数据的所有设备、装置和机器,举例而言,包括可编程处理器、计算机、或者多个处理器或计算机。除硬件以外,处理系统还可以包括为所考虑的计算机程序创建执行环境的代码,例如构成处理器固件、协议栈、数据库管理系统、操作系统或它们中的一个或多个的组合的代码。
[0098]
计算机程序(也称为程序、软件、软件应用、脚本、可执行逻辑或代码)可以以包括编译语言或解释语言、或者声明语言或过程语言等的任何形式的编程语言来编写,并且其可以以任何形式进行部署,包括被部署为独立程序或者被部署为模块、组件、子例程或者适合在计算环境中使用的其它单元。计算机程序不必与文件系统中的文件相对应。程序可以被存储在用于保持其它程序或数据(例如,标记语言文档中所存储的一个或多个脚本)的文件的一部分中,被存储在专用于所考虑的程序的单个文件中,或者被存储在多个协同文件(例如,用于存储一个或多个模块、子程序或代码的一部分的文件)中。计算机程序可以被部署为在一个计算装置上、或者在位于一个位点处或跨多个位点分布并且通过通信网络互连的多个计算机上执行。
[0099]
适合存储计算机程序指令和数据的计算机可读介质包括所有形式的非易失性或易失性存储器、介质和存储装置,举例而言,包括:半导体存储器装置,例如,eprom、eeprom和闪速存储器装置;磁盘,例如,内部硬盘或可移除盘或磁带;磁光盘;以及cd-rom、dvd-rom和蓝光。处理器和存储器可以由专用逻辑电路来补充或者并入专用逻辑电路内。服务器例如有时是通用计算机,有时是定制的专用电子装置,并且有时是这两者的组合。实现可以包括后端组件(例如,数据服务器)、或者中间组件(例如、应用服务器)、或者前端组件(例如,具有用户能够与本说明书中所描述的主题的实现进行交互所经由的图形用户界面或web浏览器的客户端计算机)、或者一个或多个这样的前端组件、中间组件或后端组件的任意组合。系统的组件可以通过任何形式或介质的数字数据通信(例如,数据网络)而互连。通信网络的示例包括局域网(“lan”)和例如因特网的广域网(“wan”)。
[0100]
已经说明了本发明的多个实施例。然而,应当理解,可以在没有背离本发明的精神和范围的情况下进行各种修改。因此,其它实施例也在所附权利要求书的范围内。
[0101]
优先权声明
[0102]
本技术要求2015年9月21日提交的美国临时申请序列号62/221,167的优先权,其全部内容通过引用并入本文。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1