基于高密度肌电采集阵列的咬合运动情况监测分析系统
electromyogram,semg)进行监测的方法,由于宏观表面肌电信号是源于各个肌纤维的所接收到生理电信号的混叠,故这类信号能一定程度上从生理角度反应运动。
10.然而,常规宏观表面肌电设备因其采样率较低,空间分辨率(即传感器在单位面积下的个数)有限等局限性,仅能够获得单个电极所在区域的单通道肌电信号,故仅使用宏观肌电设备无法获得单独的肌肉运动单元的神经电信号发放情况,而只能获得一众神经电信号发放的混叠。所以使用宏观表面肌电信号的分析方法所能够提供的解析度很有限。使用宏观表面肌电信号作为源信号很难获得精度高且细节丰富的咬合运动相关肌肉运动情况的信息。
11.(2)传感器设置及佩戴繁琐、对使用者不友善,致使难以得到推广。
12.现有监测技术所选择的目标肌群造成了基于目标肌群位置所设计的传感器位置及安置方式对环境,佩戴均有较高的要求,造成了基于现有监测技术所开发出来的系统的使用体验差,进而使得现有系统无法满足日常佩戴以及长时间监测的要求,且故难以得到推广。
技术实现要素:
13.本发明的目的在于针对现有方案在所选源信号对运动本身生理表征能力以及使用体验两个方面的局限,提供一种使用方便、监测高效的咬合运动情况监测分析系统,以克服现有咬合运动监测方法源信号精度低、细节可辨识度低等所导致的咬合运动检测准确度低以及传感器设置对使用者不友好、无法实现日常监测等问题。
14.本发明提供的咬合运动情况监测分析系统,通过对颞肌的肌肉运动单元的放电信号进行采集,采用智能算法,对微观神经肌肉工作机制为基础的人类口腔咬合运动情况进行高效监测分析。
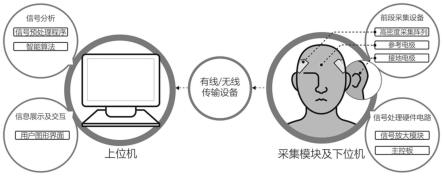
15.本发明提出的人类咬合运动情况的监测分析系统,包含两大部分:采集模块及下位机,上位机;两个部分之间通过有线及无线传输设备进行数据传输;采集模块及下位机中包括前端采集设备和信号处理硬件电路两个部分;上位机部分是用户客户端电脑,其中预装载有信号分析和信息展示交流两个程序模块。客户端将从下位机接收到的信息采集并分析后的结果展现在图形用户界面中。整体系统框架如图1所示。其中:
16.所述前端采集设备,包括:高密度肌电采集阵列、参考电极和接地电极;其中,接地电极布设于使用者左耳或右耳乳凸处,参考电极布设于眉心处;高密度肌电采集阵列布置在用户两侧颞肌表皮之上。所述高密度肌电采集阵列至少有两个电极片,每个电极片包含不小于32个触点,两片合计不小于64个触点;各采集阵列上的触点整合于一片材质柔软的可以与皮肤共形好的基材上,组成高密度肌电采集阵列。例如基材可以选用但不限于双层柔性pcb板,触点使用部分过孔设计,各触点通过表面镀金的铜制排线连接至采集阵列电极尾端的排插接口;高密度肌电采集阵列与皮肤固定,固定方式可使用能够使触点紧密接触颞肌表皮的各种方式,包括但不限于使用双面胶结合导电膏的固定方式。
17.本发明中,高密度肌电采集阵列所固定的方向选择为与颞肌肌纤维长势成正交的角度方向,可最大程度覆盖颞肌且避免电极片与头发接触。其电极覆盖位置如图2中a所示。
18.所述信号处理硬件电路,主要包括信号放大模块和主控板。其中:
19.所述信号放大模块,通过排插接口与高密度肌电采集阵列连接,将采集得到的原
始高密度肌电信号放大,以保证此后用于分析的信号有较高的信噪比。信号放大模块采用多个并行多通道生物电放大量化模拟前端设计。可选用的方案有但不限于使用大于8个的并行8通道生物电放大量化模拟前端ads1299进行信号放大模块设计,其原理图如图3所示,所有模拟前端共地,在主控板的控制下同步采集全部通道对共同接地点的电势差;
20.所述主控板,负责为整个采集模块及下位机部分供电,控制采样同步时钟、采样频率、模拟前端放大倍率、数据精度等采样相关参数,存储采集到的数据,由于通道较多,同时间采得的数据量较大,为保证在有限的通信资源下,不出现掉包或者数据堵塞的现象。本发明采取分段的方式对数据进行打包,即按照时间顺序规则,以0.1秒为窗将数据编码为一个包,而后根据传输协议通过有线或无线的传输方式传输到上位机;
21.主控板包括电源控制模块、高性能微处理器、本地存储模块插口(如,大容量非易失性存储存储介质卡插口)、无线传输模块(如,蓝牙发射模块)、usb接口、放大模块接口。电源控制模块通过电池或usb电源为电路各部分供电,并维护电池充放电。其中,电源控制模块可通过usb接口连接合适的电源为板载电池充电。高性能微处理器采用并行多spi接口,同时控制模拟前端,并提供统一的采样时钟输出至模拟前端,采集各个时刻的全部肌电原始信号并将数据进行本地存储或通过有线/无线的传输至上位机;存储至存储卡、通过usb接口上传。本地存储模块插口(如大容量非易失性存储存储介质卡插口)可以插入tf卡,高性能微处理器将数据按约定格式存储至tf卡中。主控板原理图如图4所示。
22.本发明所述上位机,可以是类似于个人电脑的、具有计算、存储、处理等功能的、拥有人机交互界面的机器。包括个人电脑、平板电脑、手机等。上位机中预装载的信号分析程序模块包括信号预处理及智能算法两个子模块;其中:
23.所述信号预处理子模块,用于对主控板得到的原始信号进行包括带通滤波、工频去除、伪迹消除、坏道检测和损坏数据剔除等预处理工作;然后将经过预处理的信号传递给智能算法子模块;
24.所述智能算法子模块,包括:根据经过预处理的信号进行计算,得到咬合发生的时域信息和空间信息,以及各个咬合动作颞肌区域的肌肉运动单元的各个神经单元发放电信息;应用分类器分析,对咬合运动情况分类,比如分类识别多种不同的咬合状态,包括咬紧、前后磨牙或者上下磨牙等;应用回归模型拟合磨牙的运动的中心曲线和中心合力,从而准确获得磨牙过程中的力的运动轨迹;
25.所述信息展示交流程序模块,用于将智能算法子模块的分析计算结果,组织成用户容易理解的信息,通过图形化的形式在屏幕界面上呈现出来,提供给使用者。可呈现的数据包括:咬合面相对运动与时间关系、咬合合力轨迹、咬合运动情况分类等。
26.本发明系统的创新点主要有:
27.(1)在目标肌群选择方面,为避免现有方案采集时候会干涉到正常嘴部咬合活动的不足,本发明选择使用颞肌作为目标肌群,进行高密度肌电信息的采集;
28.(2)在源信号类型选择方面,本发明选择使用高密度肌电采集阵列电极。由此所采集得到的肌电相较于现有方案所使用的表面宏观肌电所采得的信号,信息更丰富,采集范围更广泛,除了可获得时域信息外,还可收集空间信息;
29.(3)针对高密度肌电采集阵列采得的高密度肌电,本发明提出创新的智能算法。高密度肌电采集阵列所得信息经由所述算法处理后,可得到使用者进行咬合动作时目标肌群
肌肉的激活区域、质心、神经元支配区等空间的放电情况信息。还可以通过所述算法得到单个肌肉运动单元的神经放电信息。例如,可以分析mu运动单元的α神经单元的放电情况,可以通过mu运动单元的α神经单元的放电情况拟合咬合相关肌肉的运动情况。
附图说明
30.图1为整体系统框架。
31.图2为高密度肌电采集阵列设置示意图。
32.图3为信号放大模块原理图。
33.图4为主控板原理图。
34.图5为整体系统图,包括佩戴了头带的使用者,硬件,软件及用户图形界面。
35.图6为使用者佩戴咬合运动监测头带。
36.图7-1为硬件外形图。
37.图7-2为硬件爆炸图。
38.图8为咬合运动监测头带信号个人电脑上位机预处理模块的原理图。
39.图9为咬合运动监测头带个人电脑上位机智能算法咬合动作分类功能的原理图。
40.图10为咬合运动监测头带个人电脑上位机智能算法咬合合力拟合功能的原理图。
41.图11为不同咬合强度下的mu量化结果及肌肉激活情况图12为轨迹拟合效果。
42.图13为用户图形界面的用例图。
43.图中标号:(a)为头带控制/运行状态反馈单元,包控制开关及运行指示灯,包含开关控制,运行状态控制以及运行状态展示功能,(b)为参考电极,(c)、为绝缘硅基座,(d)为两个信号放大模块,(e)为高密度肌电采集阵列电极片,(f)为绝缘硅基座,(g)为头带硬件电路安置框架,(h)为接地电极,(i)为头带柔性头拖,(j)为主控板保护外壳,(k)为主控板,(m)为保护盖板遮盖,(n)为接口面板。(o)为咬合合力拟合功能图形展示的当前时刻咬合合力中心点。(p)为咬合合力拟合功能图形展示的一段时间馁咬合合力中心点的轨迹。
具体实施方式
44.本发明提供的咬合运动情况监测分析系统,作为一个实施例,采集模块及下位机设计为可穿戴头带式结构,其中综合了咬合力数据信号采集、放大、以及控制等功能,上位机采用个人电脑终端,整体系统图如图5所示。
45.可穿戴头带式结构,头带基础材料为棉质材料混编弹性纤维而成的布料。头带上集成了两片高密度肌电采集阵列电极片、两个信号放大模块和主控板。两片高密度肌电采集阵列电极片通过柔性pcb导线分别与相邻的信号放大模块连接,两个信号放大模块连接到主控板。
46.使用时,将头带佩戴在使用者头上,使得头带刚好覆盖眉骨,使得两片高密度肌电采集阵列电极片可以覆盖住两侧的颞肌,佩戴方法如图6所示。
47.原始肌电信号被高密度肌电采集阵列电极片捕捉到后,通过柔性pcb导线传输至信号放大模块。信号放大模块将所得原始肌电信号放大并传递到主控板模块。主控板模块将这些采样原始数据通过usb 2.0高速有线传输的形式上传至pc上位机。也可将采样原始数据储存至tf卡中,在需要时导入pc上位机用于分析。
48.(一)可穿戴头带式结构的设计
49.本实施例中,可穿戴头带式结构的外形整体如图7-1所示。图7-2为所述头带的硬件爆炸图,其中,(a)为头带控制/运行状态反馈单元,包控制开关及运行指示灯,有运行状态控制以及运行状态展示等功能,(b)为头带内侧前额位置安置的参考电极,(c)为参考电极绝缘硅胶软垫,(d)为信号放大电路,(e)为高密度肌电采集阵列,(f)为采集阵列绝缘硅胶软垫,(g)为头带硬件电路安置框架,(h)为接地电极,(i)为头带柔性头拖,(j)主控板保护外壳,(k)为主控板模块,(m)保护盖板遮盖,(n)为接口面板包括了usb插口,tf卡插口以及sd卡插口。
50.所述的头带式结构上包含两部分:头带硬件电路安置框架(g)和头带柔性头拖(i)。其中,头带硬件电路安置框架的材料选用具有较好弹性,抗冲击性能的无毒无害材料,头带硬件电路安置框架内外侧搭载了大量的电路单元和传感器单元。包括:两片高密度肌电采集阵列电极片(e)以及两个信号放大模块(d)分别安置于头带硬件电路安置框架前段两侧,呈中线对称。高密度肌电采集阵列(e)位于头带硬件电路安置框架(g)内侧紧贴皮肤,信号放大模块(d)位于头带内侧,靠近高密度肌电采集阵列(e)侧。主控板模块(k)位于头带额头位置,被主控板保护外壳(j)所包裹。头带控制/运行状态反馈单元(a)被安置主控板保护外壳(j)外侧。接口面板(n)被保护盖板(m)遮盖,安置在主控板保护外壳(j)表面。当需要使用接口面板(n)时,需要将保护盖板(m)向下翻即可将包含了usb接口,tf卡插口和sd卡插口的接口面板(n)暴露出来。参考电极(b)位置设置在头带硬件电路安置框架额头部分的内侧。接地电极(h)位于头带硬件电路安置框架(g)与耳后接触的位置,左右各一个。各部分具体位置如图7-2所示。头带柔性头拖(i)选用有良好弹性,无毒无害的材料。
51.头带硬件电路安置框架(g)和头带柔性头拖(i)所组成的头带可以提供较好的向内的压力,使得头带内侧各传感器单元可以较好地被压合在使用者皮肤表面。额头处(i)参考电极和两侧颞肌位置的高密度肌电采集阵列(e)搭载在绝缘硅基座(c,f)上,电极触点位置略高于硅胶基座表面。三片绝缘硅胶基座(c,f)安置在头带硬件电路安置框架(g)并略高于头带内侧平面以保证电极触点可以与皮肤有较好的的接触性的同时,绝缘且亲肤的柔软材质也提供了舒适的佩戴体验以及防止电路与皮肤的接触。连接=高密度肌电采集阵列(e)与信号放大模块(d)的连线通过柔性印刷电路进行了屏蔽。
52.(高密度肌电采集阵列e)探头是一整片pcb。其中,上面集成了64个大小为2毫米的圆形触点探头,各个探头间距为3毫米。圆形触电探头材料为铜,表面进行了镀金工艺。所有64个触点各自连接到柔性印刷电路尾部插排。所述插排是用于与信号放大电路的插口连接。
53.头带整体的硬件设计保证了使用方便,固定可靠,佩戴舒适,长时间使用的要求。
54.(二)电路设计
55.考虑到整个实施例的佩戴舒适性,以及使用便利性,整体电路设计采取分布式模块化设计,包含信号放大模块和主控模块两部分。电路各模块之间通过柔性pcb连接。
56.(1)信号放大模块
57.本模块分为两个相同的信号放大电路,分别通过排插接口与两片采集高密度肌电采集阵列探头连接。每个信号放大电路分别采用8个并行8通道生物电放大量化模拟前端ads1299进行设计,其功能为将采得的原始高密度肌电信号放大,以保证此后用于分析的信
号有较高的信噪比。放大后的信号通过柔性pcb传输到主控板模块。
58.(2)主控板
59.主控板中各个元器件集成在一整片pcb上。主控板模块与两块信号放大电路通过柔性pcb连接。主控板承担了为整个采集模块及下位机部分供电,控制采样同步时钟、采样频率、模拟前端放大倍率、数据精度等采样相关参数,存储采集到的数据,并根据传输协议将分段数据通过存储介质或usb2.0传输至个人电脑上位机的功能。主控板模块中包括电源控制模块、高性能微处理器、大容量非易失性存储存储介质卡插口、usb接口、放大模块接口。电源控制模块通过电池或usb电源为电路各部分供电,并维护电池充放电。高性能微处理器采用并行多spi接口同时控制16片模拟前端,并提供统一的采样时钟输出至模拟前端,在采集各个时刻的全部肌电原始信号同时,将数据存储至存储卡或通过usb2.0接口上传至个人电脑上位机。大容量非易失性存储存储介质卡插口可以插入tf卡,微处理器会将数据按约定格式存储至tf卡中。usb接口连接pc上位机或电源适配器,一方面为板载电池充电,另一方面作为usb上传数据的通道。
60.(三)个人电脑上位机上的软件及智能算法
61.经过主控板模块处理后的数据通过tf存储卡或者直接使用usb2.0将原始数据导入到pc中,供个人电脑上位机分析软件先进行对原始信号的预处理而后使用智能算法对所得数据进行分析。所得分析结果将会呈现在用户图形界面中。
62.本发明中,系统的工作流程如下:
63.使用者初次使用时,需要进行一次系统校准。使用者佩戴上设备后根据提示完成相应的动作,采得的数据被传至上位机存储后被用于基于mu分解的咬合运动情况分类。在模型训练个性化校准完成后用户就可以使用设备进行咬合运动情况的监测分析了。
64.使用者可以通过使用安装在pc端上的用户端软件对报告及记录进行管理及浏览。
65.(1)数据预处理子模块
66.数据预处理子模块的工作目标是滤除无用信息以保证送入智能算法训练的数据质量,以提高预测的准确度,同时节省个人电脑上位机的算力以及存储介质的存储资源。
67.本子模块先将原始数据送入通过带通滤波器滤波获取10-900hz的肌电信号,而后使用50hz陷波滤波器去除50hz及其倍频对应的工频干扰从而获得较为纯净的肌电信号。伪迹消除工作是使用小波变换运动伪迹算法,坏道检测,损坏数据剔除等预处理工作。而后处理完成的信号将传递给智能算法子模块。
68.(2)智能算法子模块
69.本实例所采用智能算法,旨在通过对使用者发生口腔咬合运动时所捕捉到生理电信号进行盲源分离,以获得能够有效表征肌肉的运动动作电位信息。而后对所得抽象的运动动作电位信息,进一步应用分类器分析,从而实现咬合运动情况分类。比如分类识别多种不同的咬合状态,包括咬紧、前后磨牙或者上下磨牙等。同时可以应用回归模型拟合磨牙的运动的中心曲线和中心合力,从而准确获得磨牙过程中的力的运动轨迹。
70.本实施例所采用智能算法子模块包含为两部分功能,分别为基于mu分解结果的咬合运动分类功能,以及基于cnn网络架构建立的回归模型用以拟合咬合运动的中心点变化曲线和中心合力变化过程。
71.(2.1)咬合运动分类
72.咬合运动分类功能本实施例的使用场景,着重于对获取的高密表面肌电信号(hd-semg)进行分解,得到mu,并进一步对mu分解结果的咬合运动情况,例如使用者的当时的口腔咬合力度,咬合时下颌骨的运动方向等,进行分类分析。整个智能算法的流程包括:特征提取部分、特征降维部分和咬合动作分类部分。咬合运动分类功能原理如图9所示。
73.(2.1.1)特征提取
74.首先,使用fastica获取mu脉冲序列。由于高密度semg信号是所有运动单元动作电位(motor unit action potentials,muap)的总和。因此,假设mu放电形成相同形状的muap波
75.形,每个mu的muap波形可以通过尖峰触发平均方法在每个通道上获取。应用40ms的窗口获取每个通道全部muap波形,其中每个事件监测到的放电时间以第x个样本为中心。
76.然后,通过计算每个semg通道中包含的muap的rms,获得每个mu的rms映射。使用rms映射获得mu表示后,对mu空间激活模式进行量化,以提供mu属性的最直观特征,如活跃区域,质心以及神经元支配区(innervation zone)。
77.为了方便从rms图中提取相同数目的水平和垂直特征,本发明所述智能算法通过双三次插值使长方形的原始rms图重塑为正方形图。
78.最后为了进一步方便后续处理,重塑后的rms图进行去均值。
79.(2.1.2)特征降维
80.提出的正则化不相关多元线性判别分析(regularized uncorrelated multilinear discriminant analysis,rumlda)方法[1]通过张量到矢量的映射直接从零均值rms矩阵中映射中获得特征向量。与mu量化相反,对于动作分类,需要一些可区分但不一定可理解的特征。rumlda可以通过将原始张量数据投影到向量子空间中来提取具有区分性的特征。
[0081]
与传统的基于高密度肌电数据进行运动检测系统会使用较多的电极,为保证后续的模型建立工作的顺利进行提供维度丰富的数据不同。本发明所述系统在采集端考虑佩戴的舒适性,对系统的电极布置方式,位置进行了限制,并尽量减小了电极的数量和尺寸。这对智能算法模块带来的挑战是在所获得数据维度较少的情况下需要保证较高的性能。为此,本发明对rumlda进行了调整以适配本发明的数据特性。
[0082]
本发明所述的rumlda是为一种lda的变体,可以在不破坏本来肌肉二维空间放电信息的情况向解决含有2维空间信息的分类问题。本发明系统中的rumlda首先是基于最大间距准则获取投影矩阵。最大间距准则主要采用类间离散度矩阵与类内离散度矩阵之差作为判别准则,从而可以避免因类内散度矩阵奇异而导致无法求解投影矩阵的问题。同时,rumlda还通过添加约束来提取冗余最小的不相关特征。此外,rumlda在rms图像行和列两个方向上依次执行该方法,使得可以获得一个相对更低维的投影矩阵,使得性能更好,特征数目降低,提高运行速度。
[0083]
(2.1.3)咬合动作分类
[0084]
本发明所述智能算法可以对使用者的咬合动作依照咬合情况进行分类。具体是将通过rumlda获得的特征输入到分类器(如k-近邻算法(k-nearest neighbors knn)分类器中,将每个单独的mu与对应肌肉关联起来。分类器中的超参利用遗传算法进行确定。相对网格搜索,遗传算法可以更快的确定最优参数,从而进一步提高分类识别性能。最后,通过训
练好的模型获得测试数据的预测标签。这些标签均为可以被理解的咬合动作,包括口腔紧咬、口腔左右磨牙、口腔前后磨牙等。
[0085]
另外,对于涉及的分类器,除了knn分类器外,还可以使用包括但不限于支持向量机,随机森林,神经网络,朴素贝叶斯分类器,集成学习模型,决策树等。
[0086]
(2.2)咬合合力拟合
[0087]
本发明所述智能算法包含咬合合力中心轨迹拟合功能。所述功能是针对本发明所述场景基于卷积神经网络(convolutional neural network,cnn)实现。具体通过将获得的原始hd-semg信号输入到预训练好的卷积神经网络(cnn)中,输出对应的多自由度下的咬合力百分比大小,整体流程如图10所示。卷积神经网络获取特征数据后输出包含4个类别,分别代表口腔中左前区域、右前区域、左后区域、右后区域的咬合力百分比大小。而后算法会将输出的百分比映射到咬合面模型上,不同磨牙划分为4块区域,分别为左前区域、右前区域、左后区域和右后区域,它们的坐标分别设定为固定坐标,将其作为系数与不同通道的输出计算加权和得到反应的使用者咬合合力中心点轨迹。
[0088]
所述卷积神经网络中,第一与三层的卷积层是用于提取肌电信号中的空间信息,通过一组滤波器学习对应区域肌肉的放电情况与咬合力大小的对应关系。第二与四层的池化层对卷积层检测到的相同特征进行融合,缩减模型大小,提高网络的运行速度。第四层池化层的输出结果展平后输入随后的全连接层。第五与六层的全连接层对咬合力相关信息进行整合。最后的输出层将整合得到的信息,依照咬合合力检测任务的需要所建立的咬合力模型将结果整合为各个区域的咬合力百分比大小,并用于最终的咬合合力的拟合轨迹结果的生成。
[0089]
(四)系统验可行性展示
[0090]
在实验室环境下对本发明所提系统方案的可行性验进行了验证。部分结果如下:
[0091]
(1)不同咬合力强度下的颞肌区域微观层面上的信息。以表明本发明所述方案可以捕捉不同咬合状态及强度下的从微观的神经元层面信息。图11.系统采集使用者以大、中、小三种不同强度的力进行紧咬动作的数据,通过本发明所述智能算法的特征提取步骤可以直观地得到使用者颞肌区域在这三种不同强度下多个不同mu的激活情况以及总体的肌群被激活的情况。
[0092]
(2)采集了使用者较为常见的口腔咬合运动类型,即左右磨牙,前后磨牙以及口腔紧咬三种不同的咬合运动。通过所述智能算法中的分类功能,在运动训练集占比为整个数据集3/4,2/3,1/2,三种不同的划分标准下,相对应的分类准确度分别为99%,97%,96%。
[0093]
(3)采集了使用者一段时间的自由咬合运动。通过所述智能算法中的咬合合力轨迹拟合功能,使用者咬合合力的作用中心点在采样时间内的轨迹以及咬合合力的力量变化被检测并可视化为图12所示。图12中o为当前时刻咬合合力中心点位置,其颜色代表此刻咬合力与最大咬合力的百分比。p为采样开始到当前时刻咬合力合力中心点的轨迹,其颜色变化表示咬合力大小的变化。
[0094]
用户图形界面:为用户提供浏览报告,浏览记录情况,并对这些信息进行管理操作的图形界面承担展示结果,生成报告,报告管理等功能。
[0095]
图12为本实施例的用户界面的用例图。
[0096]
上述装置和操作对于本领域的普通技术人员而言将是熟悉的并被其理解。
[0097]
以上对具体实例的描述是通过说明方式给出的而不应视为限制性的。进一步地,在不背离本发明的精神的情况下,可以在本发明实施例的范围内做出许多改变和修改,并且本发明包括这样的改变和修改。
[0098]
和现有技术相比,本发明的优点在于:
[0099]
(1)本发明提出了利用高密度肌电采集阵列对颞肌进行观测来通过对应肌电监测咬合运动情况的系统。这样的电极安置排布较现有电极安置方案具有佩戴方便、舒适、可长期监测等优势,对使用者更为友好。
[0100]
(2)本发明使用高密度肌电采集阵列获取原始肌电信号。相较于传统宏观肌电电极,高密度肌电阵列所获得的原始信号更为丰富。除了可获得时域信息外,还可收集空间信息。
[0101]
(3)本发明可以分析mu运动单元的α神经单元的放电情况。
[0102]
(4)本发明可以通过mu运动单元的α神经单元的放电情况拟合咬合相关肌肉的运动情况。
[0103]
参考文献
[0104]
[1]lu,haiping,konstantinos n.plataniotis,and anastasios n.venetsanopoulos."uncorrelated multilinear discriminant analysis with regularization and aggregation for tensor object recognition."ieee transactions on neural networks 20.1(2008):103-123。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1