一种一氧化氮治疗仪的NO流量控制系统的制作方法
一种一氧化氮治疗仪的no流量控制系统
技术领域
1.本发明属于医疗设备制造技术领域,具体涉及一种一氧化氮治疗仪的no流量控制系统。
背景技术:
2.心血管疾病是危害人类健康的严重疾病,是造成死亡的主要原因之一,每年还有数以万计的人因患该病导致残疾。肺动脉高压是危重心血管病患者常见并发症,也是目前治疗心血管疾病的难点之一。1991年fratacci等在动物肺动脉高压模型实验中证实了吸入低浓度一氧化氮(nitric oxide,no)可降低肺动脉压力,因为它具有高度选择性肺血管扩张作用,所以正日益成为合并呼吸窘迫综合症(rds)和ph患者重要的治疗措施。吸入no治疗可以使体外膜肺支持(ecmo)的使用减少80%,显著降低患者的死亡率,因此尽管吸入低浓度no治疗本身具有一定程度的危险性,但美国食品和药物管理局(fda)在经过7年多论证后仍于1999年批准吸入no应用于临床治疗合并ph和rds的患者。吸入一氧化氮治疗的危险性具体包括:no安全浓度范围很小、易与血红蛋白结合生产高铁血红蛋白、极易被氧化成二氧化氮(no2)引起肺水肿、突然中断吸入会产生停药反应以及no对环境和医护人员的伤害等。这些问题使它在临床使用中的安全倍受关注。因此,在吸入no治疗中任何保证精确的no浓度、减少no被氧化、防止no吸入突然中断、避免废气对环境和医护人员的伤害等对确保no治疗的疗效和安全都至关重要。目前国内很多医院尚未开展吸入no治疗,缺少必要的安全设备就是其中主要原因之一,少数使用吸入no治疗的医院多是在使用简单的流量计法控制no浓度,疗效和安全度都不可靠。通过设计一种精确、安全的、符合医用标准的no自动给药系统,可以很好地解决上述问题,这可促进吸入一氧化氮的临床使用,解决心血管疾病治疗中面临的难题,降低心血管疾病的死亡率。
技术实现要素:
3.本发明的目的在于提供一种一氧化氮治疗仪的no流量控制系统,旨在解决现有技术中的问题。
4.由于目前国内很多医院尚未开展吸入no治疗,缺少必要的安全设备就是其中主要原因之一,少数使用吸入no治疗的医院多是在使用简单的流量计法控制no浓度,疗效和安全度都不可靠,因此在本技术中,本技术人设计一种医用一氧化氮自动给药系统,利用浓度反馈机制自动精确控制吸入一氧化氮浓度;使用后置式吸入方式缩短一氧化氮与氧气接触时间,并与患者呼吸周期同步;结合医学临床的具体要求和一氧化氮的特性,配备合理的安全设计。本课题将联合基础研究和临床应用,通过产学研相结合的方式开发自主知识产权的吸入一氧化氮给药系统,使其具有自动化、多功能、高兼容性和安全性高等特点。本课题可解决目前国内临床使用一氧化氮的安全性和有效性,促进吸入一氧化氮的临床推广和应用,改善合并肺高压和adrs的心血管疾病和肺部疾病的生存率。
5.为实现上述目的,本发明提供如下技术方案:包括呼吸机供气端、控制芯片算法、
no流量传感器、呼吸机流量传感器、no、n2混合气源、比例阀、气泵、no、no2、o2浓度传感器;
6.所述气泵连接所述呼吸机供气端,气泵与呼吸机供气端之间连接所述呼吸机流量传感器,气泵远离呼吸机流量传感器端连接所述no、no2、o2浓度传感器;
7.所述no、n2混合气源依次连接所述比例阀、no流量传感器后与所述气泵连接;
8.所述no流量传感器、呼吸机流量传感器、no、no2、o2浓度传感器均连接至控制芯片,控制芯片控制比例阀调节
9.优选的,所述控制芯片的算法包括下列步骤:
10.err=set_flow-flow;
11.dummy=(set_flow+flow)/2+10;
12.若(dummy<value_max)
13.dummy=value_max;
14.若(err>diff_max)
15.err=diff_max;
16.否则若(err<(0-diff_max))
17.err=0-diff_max;
18.add=err*factor/dummy;
19.若(err<set_flow/10或err>(0-set_flow/10))
20.add_=add_/2;
21.若add_<0
22.{
23.若sum>startp*32-add_,sum=sum+add_;
24.否则sum=startp*32;
25.}
26.否则
27.{
28.若sum<saturep*32-add_,sum=sum+add_;
29.否则sum=saturep*32;
30.}
31.最终返回值为sum/32。
32.其中,输入为设定流量值set_flow,传感器实测值flow,输出值为比例阀da值valve_data,最大误差限diff_max,最大设置底数value_max,倍增系数factor,算法中存在积分累加和sum,该参数为全局变量,算法中涉及两个阀参数,开启点startp和饱和点saturep,sum初始值为startp*32。
33.与现有技术相比,本发明的有益效果是:通过该流量跟随控制算法,可以实现no浓度的精确控制,并且实现no输出与呼吸机同步,该算法可以通过修改factor值改善算法响应速度,修改diff_max和value_max平衡不同设定参数和状态下的控制效果。经过实测,该算法响应较为平稳,抗干扰能力较强,0到7l/min的阶跃信号响应时间在100ms以内,几乎无超调出现。
附图说明
34.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
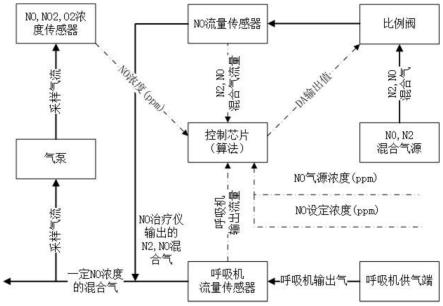
35.图1为本发明的控制气路和数据流图示意图。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.实施例
38.请参阅图1,本发明提供以下技术方案:包括呼吸机供气端、控制芯片算法、no流量传感器、呼吸机流量传感器、no、n2混合气源、比例阀、气泵、no、no2、o2浓度传感器;
39.所述气泵连接所述呼吸机供气端,气泵与呼吸机供气端之间连接所述呼吸机流量传感器,气泵远离呼吸机流量传感器端连接所述no、no2、o2浓度传感器;
40.所述no、n2混合气源依次连接所述比例阀、no流量传感器后与所述气泵连接;
41.所述no流量传感器、呼吸机流量传感器、no、no2、o2浓度传感器均连接至控制芯片,控制芯片控制比例阀调节
42.具体的,控制芯片的算法包括下列步骤:
43.err=set_flow-flow;
44.dummy=(set_flow+flow)/2+10;
45.若(dummy<value_max)
46.dummy=value_max;
47.若(err>diff_max)
48.err=diff_max;
49.否则若(err<(0-diff_max))
50.err=0-diff_max;
51.add_=err*factor/dummy;
52.若(err<set_flow/10或err>(0-set_flow/10))
53.add_=add_/2;
54.若add_<0
55.{
56.若sum>startp*32-add_,sum=sum+add_;
57.否则sum=startp*32;
58.}
59.否则
60.{
61.若sum<saturep*32-add_,sum=sum+add_;
62.否则sum=saturep*32;
63.}
64.最终返回值为sum/32。
65.其中,输入为设定流量值set_flow,传感器实测值flow,输出值为比例阀da值valve_data,最大误差限diff_max,最大设置底数value_max,倍增系数factor,算法中存在积分累加和sum,该参数为全局变量,算法中涉及两个阀参数,开启点startp和饱和点saturep,sum初始值为startp*32。
66.对于上述算法,no流量的精确控制是通过比例阀和传感器的闭环反馈控制实现的,流量传感器的精度已由标定过程保证,而输出精度由控制算法保证。本文采用了无差积分式控制算法,为了提高抗干扰能力,排除了比例环节,并对积分环节进行改造。该算法可以通过调整固定参数提升控制效果。
67.该控制算法输入为设定流量值set_flow,传感器实测值flow,输出值为比例阀da值valve_data。算法中存在三个固定参数,最大误差限diff_max,最大设置底数value_max,倍增系数factor,算法中存在积分累加和sum,该参数为全局变量,算法中涉及两个阀参数,开启点startp和饱和点saturep,sum初始值为startp*32。
68.最后,该算法可以通过修改factor值改善算法响应速度,修改diff_max和value_max平衡不同设定参数和状态下的控制效果。
69.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1