手术器械控制方法、装置和电子装置与流程
1.本技术实施例涉及机械领域,尤其设计一种手术器械控制方法、装置和电子装置。
背景技术:
2.手术器械是手术机器人的末端器械夹,安装于手术机器人上,代替人手在人体内部完成手术操作。对于结构多样的手术器械而言,其控制方式也不同,没有一种通用的控制算法可以应用于所有的手术器械。
3.现有的手术器械一般为钢丝绳传动,其对应的运动学控制算法不能应用在连杆型手术器械上,因此需要对应的控制方法解决对连杆型手术器械的控制。
技术实现要素:
4.本技术实施例提供一种手术器械控制方法、装置和电子装置,可实现通过已知的末端器械夹和俯仰端等关节角度即可得到控制端的直线位移来控制手术器械运动,且控制精度高,提高了对手术器械的控制精度。
5.本技术实施例一方面提供了一种手术器械控制方法,包括:
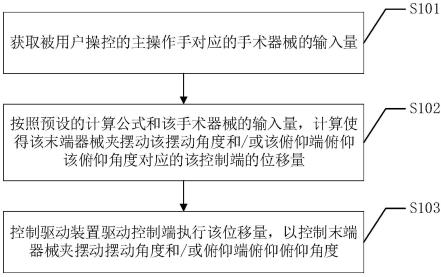
6.获取被用户操控的主操作手对应的手术器械的输入量,所述手术器械包括转动连接的末端器械夹、俯仰端和控制端,所述手术器械的输入量包括所述末端器械夹的摆动角度和/或所述俯仰端的俯仰角度;
7.按照预设的计算公式和所述输入量,计算使得所述末端器械夹摆动所述摆动角度和/或所述俯仰端俯仰所述俯仰角度对应的所述控制端的位移量;
8.控制驱动装置驱动所述控制端执行所述位移量,以控制所述末端器械夹摆动所述摆动角度和/或所述俯仰端俯仰所述俯仰角度。
9.本技术实施例一方面还提供了一种手术器械控制装置,包括:
10.获取模块,用于获取被用户操控的主操作手对应的手术器械的输入量,所述手术器械包括转动连接的末端器械夹、俯仰端和控制端,所述手术器械的输入量包括所述末端器械夹的摆动角度和/或所述俯仰端的俯仰角度;
11.计算模块,用于按照预设的计算公式和所述输入量,计算使得所述末端器械夹摆动所述摆动角度和/或所述俯仰端俯仰所述俯仰角度对应的所述控制端的位移量;
12.控制模块,用于控制驱动装置驱动所述控制端执行所述位移量,以控制所述末端器械夹摆动所述摆动角度和/或所述俯仰端俯仰所述俯仰角度。
13.本技术实施例一方面还提供了一种电子装置,包括:存储器和处理器;所述存储器存储有可执行程序代码;与所述存储器耦合的所述处理器,调用所述存储器中存储的所述可执行程序代码,执行如上述实施例提供的手术器械控制方法。
14.从上述本技术各实施例可知,待控制的手术器械包括转动连接的末端器械夹、俯仰端和控制端,该手术器械通过末端器械夹的摆动和/或俯仰端的俯仰完成手术操作,需要通过控制端的直线运动驱动末端器械夹的摆动和俯仰端的俯仰,获取与手术器械有运动映
射关系的主操作手的动作,得到末端器械夹摆动摆动角度和/或俯仰端俯仰俯仰角度,计算出对应的控制端的直线位移,控制驱动装置驱动该控制端执行该直线位移,从而控制手术器械实现该主操作手的运动,该手术器械的动作维度多,可以实现更复杂的操作,并且大大降低蠕变,提高了使用寿命,上述针对该手术器械的控制方法,通过已知的末端器械夹和俯仰端等关节角度即可得到控制端的直线位移来控制手术器械运动,计算方法简便,计算精度高,提高了对该手术器械的控制精度。
附图说明
15.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
16.图1为本技术实施例提供的手术器械控制方法的应用场景示意图;
17.图2a为本技术实施例提供的手术器械控制方法所控制的手术器械的外观结构示意图
18.图2b为图2a的局部放大示意图;
19.图3a为本技术实施例提供的手术器械控制方法所控制的手术器械的连杆结构和推杆结构的爆炸图的局部放大示意图
20.图3b为本技术实施例提供的手术器械控制方法所控制的手术器械的爆炸图的局部放大示意图;
21.图3c为本技术实施例提供的手术器械控制方法所控制的手术器械的爆炸图的局部放大示意图
22.图3d为本技术实施例提供的手术器械控制方法所控制的手术器械中第二连杆的结构示意图;
23.图4a为本技术实施例提供的手术器械控制方法所控制的手术器械的正视图;
24.图4b为本技术实施例提供的手术器械控制方法所控制的手术器械的剖视图;
25.图4c为本技术实施例提供的手术器械控制方法所控制的手术器械的侧视图;
26.图5a为本技术实施例提供的手术器械控制方法所控制的手术器械俯仰端俯仰运动示意图;
27.图5b为本技术实施例提供的手术器械控制方法所控制的手术器械的第一器械夹向外侧转动示意图;
28.图5c为本技术实施例提供的手术器械控制方法所控制的手术器械的第二器械夹向外侧转动示意图;
29.图5d为本技术实施例提供的手术器械控制方法所控制的手术器械的俯仰端和两个器械夹同时俯仰和转动的示意图;
30.图6为本技术一实施例提供的手术器械控制方法的实现流程图;
31.图7为本技术另一实施例提供的手术器械控制方法的实现流程图;
32.图8为本技术实施例提供的手术器械控制方法所控制的手术器械建立有第一坐标系和第二坐标系的一个局部结构示意图;
33.图9为本技术实施例提供的手术器械控制方法所控制的手术器械建立有第一坐标系的另一个局部结构示意图;
34.图10为本技术实施例提供的手术器械控制方法所控制的手术器械建立有第二坐标系的另一个局部结构示意图;
35.图11为本技术实施例提供的手术器械控制方法所控制的手术器械的第一偏置曲柄滑块机构的原理示意图;
36.图12为本技术实施例提供的手术器械控制方法所控制的手术器械的第二传动链的第二偏置曲柄滑块机构的原理示意图;
37.图13为本技术实施例提供的手术器械控制方法所控制的手术器械的第二传动链的第三偏置曲柄滑块机构的原理示意图;
38.图14为本技术一实施例提供的手术器械控制装置的结构示意图;
39.图15为本技术一实施例提供的电子装置的结构示意图。
具体实施方式
40.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.参见图1,本技术实施例提供的手术器械控制方法的应用场景示意图。如图1所示,该手术器械控制方法可用于通过终端实现对手术器械的控制,具体地,终端100连接主操作手200和驱动装置300,驱动装置300还连接手术器械400,驱动装置300为具有直线驱动功能的直线电机,对应推拉手术器械400的控制端,该控制端具体为多个推杆,通过驱动装置300的推拉控制手术器械400的末端器械夹的摆动和/或俯仰端的俯仰,该末端器械夹包括两个可独立活动的器械夹,能够完成单个器械夹的摆动和两个器械夹的相对摆动,即,用户通过操控主操作手200控制手术器械400,主操作手200的运动映射到手术器械400上,实现俯仰端俯仰和末端器械夹摆动的三个自由度上的运动。终端100可以为pc机、笔记本电脑等电子装置。
42.参见图2a、2b、3a、3b、3c、3d、4a、4b和4c,其中图2a和图2b为本技术实施例的手术器械控制方法中的手术器械的外观结构示意图,图3a、3b和3c为本技术实施例的手术器械控制方法中的手术器械的结构示意图,3d为第二连杆的结构示意图,图4a、4b和4c为该手术器械的三个不同角度的视图。
43.具体地,手术器械包括末端器械夹10、俯仰端20和控制端30,它们之间均为转动连接。末端器械夹10包括第一器械夹11和第二器械夹12,第一器械夹11包括第一夹持部111和第一枢接部112,第二器械夹12包括第二夹持部121和第二枢接部122;俯仰端20包括两个连接耳21,两个连接耳21之间形成第一缺口22,两个连接耳21通过机械夹转动轴13转动连接末端器械夹10,第一缺口22用于容纳末端器械夹10,避免俯仰端20干涉末端器械夹10的摆动;控制端30包括控制端外鞘31,以及被控制端外鞘31容纳的包括多个连杆的连杆结构40和包括多个推杆的推杆结构50,末端器械夹10和俯仰端20通过连杆结构40与推杆结构50连接,推杆结构50的末端露在控制端外鞘31的外部,与驱动装置300连接。进一步地,俯仰端20
通过俯仰端的转动轴24与控制端外鞘31转动连接。末端器械夹10可相对于俯仰端20摆动,俯仰端20可相对于控制端30俯仰。摆动和俯仰是相对独立的运动,可以分别或同时完成。
44.进一步地,连杆结构40包括第一连杆41、第二连杆42、第三连杆43、第四连杆44、第五连杆45、第六连杆46和第七连杆47,推杆结构50包括第一推杆51、第二推杆52和第三推杆53,其中,第一器械夹11与第一连杆41、第二连杆42、第三连杆43和第一推杆51按顺序通过转动轴首尾连接为第一传动链,其中,第一器械夹11通过第一连接轴611与第一连杆41转动连接,第一连杆41通过第二连接轴612与第二连杆42转动连接,第二连杆42通过第三连接轴613与第三连杆43转动连接,第三连杆43通过第四连接轴614与第一推杆51转动连接;第二器械夹12与第四连杆44、第五连杆45、第六连杆46和第二推杆52按顺序通过转动轴首尾连接为第二传动链,其中,第二器械夹12通过第五连接轴621与第四连杆44转动连接,第四连杆44通过第六连接轴622与第五连杆45转动连接,第五连杆45通过第七连接轴623与第六连杆46转动连接,第六连杆46通过第八连接轴624与第二推杆52转动连接该第一传动链和该第二传动链结构、功能相同;俯仰端20与第七连杆47、第三推杆53按顺序通过转动轴首尾连接为第三传动链,其中,俯仰端20通过连杆转动轴48与第七连杆47转动连接,第七连杆47通过第九连接轴631与第三推杆53转动连接。上述结构中的器械夹、俯仰端、连杆、和推均为刚性材料构成,避免了柔性结构可能造成的蠕变。
45.进一步地,第二连杆42具有第一避让槽421,第五连杆45具有第二避让槽451,俯仰端20在执行俯仰动作时,避让俯仰端的转动轴24,使得手术器械无论是俯仰端20俯仰运动还是末端器械夹10的摆动,第二连杆42、第五连杆45都不会与俯仰端的转动轴24发生干涉。
46.参见图3d,第二连杆42的结构如图3d所示,第五连杆45与第二连杆42的结构相同。以第二连杆42为例,进一步地,第二连杆42还具有凸耳422,凸耳422上具有连接轴孔423,连接轴613穿过连接轴孔423连接第二连杆42与第三连杆43。凸耳422在第三连杆43的运动平面内沿横向于第二连杆42的长度方向的方向延伸。第三连杆43与凸耳422形成铰接结构。可缩短第二连杆42的整体长度,使得手术器械在与第二连杆42相关的比较极端的位置上,第二连杆42突出的长度较小。
47.进一步地,为了更好的避免该手术器械的俯仰端和控制端在运动时互相干涉,在会发生干涉的其他位置也设置了多个避让槽,具体地,第一连杆41上设置第二避让槽411,用于避让器械夹转动轴13,避免第一连杆41在运动时与器械夹转动轴13发生干涉,影响运动;第四连杆44具有与第二避让槽411相同形状和功能的第三避让槽441,用于避让器械夹转动轴13,避免第四连杆44在运动时与器械夹转动轴13发生干涉,影响运动.
48.在俯仰端20上设置有第四避让槽201,第五避让槽202和第六避让槽203;
49.其中,第四避让槽201用于避免第三连杆43与俯仰端20的相对运动发生干涉;
50.第五避让槽202用于避免第六连杆46与俯仰端20的相对运动发生干涉;
51.第六避让槽203用于避免第七连杆47与俯仰端20的相对运动发生干涉。
52.进一步地,控制端外鞘31上具有第七避让槽311和第八避让槽312;
53.其中,第七避让槽311用于避免第三连杆43与控制端外鞘31的相对运动发生干涉;
54.第八避让槽312用于避免第六连杆46与控制端外鞘31的相对运动发生干涉。
55.驱动装置300推拉各推杆控制俯仰端20和末端器械夹10运动,具体参见图5a~图5d。
56.其中,图5a为俯仰端20俯下的结构示意图,拉动第三推杆53可令俯仰端20沿图5a的箭头方向运动,推动第三推杆53可令俯仰端20沿图5a的箭头方向的反方向运动;
57.图5b为第一器械夹11向外摆动的结构示意图,拉动第一推杆51可令第一器械夹11沿图5b中箭头方向背离第二器械夹12摆动,推动第一推杆51可令第一器械夹11沿该箭头方向的反方向相向第二器械夹12摆动;
58.图5c为第二器械夹12向外摆动的结构示意图,与第一器械夹11摆动的原理相同,拉动第二推杆52可令第二器械夹12沿图5c中的箭头方向背离第一器械夹11摆动,推动第二推杆52可令第二器械夹12沿该箭头方向的反方向相向第一器械夹11摆动;
59.图5d为第一器械夹11和第二器械夹12与俯仰端20同时运动的结构示意图,箭头方向分别为它们的运动方向。具体地,第二连杆42和第五连杆45可滑动地收容于俯仰端20内,因此,当第三推杆53通过第七连杆47驱动俯仰端20相对控制端外鞘60进行转动时,第二连杆42和第五连杆45也会跟随俯仰端20一起相对控制端外鞘60转动。如图4b所示,当第七连杆47通过第三推杆53驱动俯仰端20相对控制端外鞘60围绕y0轴在x0z0平面内进行俯向转动时,第二连杆42和第五连杆45也跟随俯仰端20一起相对控制端外鞘60在x0z0平面内同方向转动。由于第一推杆51和第二推杆52没动,第二连杆42和第五连杆45的凸耳(第二连杆的凸耳422的位置如图3d所示,第五连杆45的凸耳在图中未示出,与凸耳422的位置和结构相同)分别与第三连杆43和第六连杆46的连接处向外凸出,即,向x轴的负半轴方向凸出,第二连杆42和第五连杆45在俯仰端20内部设置的导向结构内沿俯仰端20的竖直轴向滑动,进而分别通过第一连杆41和第四连杆44驱动第一器械夹11和第二器械夹12相对彼此背向摆动,即摆动角度增大。当驱动俯仰端20仰向转动时,反之,当第七连杆47通过第三推杆53驱动俯仰端20相对控制端外鞘60围绕y0轴在x0z0平面内进行仰向转动时,第一器械夹11和第二器械夹12相对于彼此相向摆动,即摆动角度减小。
60.参见图6,本技术一实施例提供的手术器械控制方法的实现流程图。该方法可应用于图1所示的终端100,如图6所示,该方法具体包括:
61.步骤s101,获取被用户操控的主操作手对应的手术器械的输入量;
62.具体的,该手术器械的结构参见上述图2a~图5d所示,手术器械包括转动连接的末端器械夹、俯仰端和控制端,该手术器械的输入量包括末端器械夹的摆动角度和/或俯仰端的俯仰角度。即,可以是末端器械夹摆动或俯仰端俯仰,或者末端器械夹摆动和俯仰端俯仰同时进行,摆动和俯仰的方向相交,其中,末端器械夹摆动包括一个器械夹摆动或两个器械夹同时摆动。
63.主操作手的运动与手术器械的运动具有映射关系,用户操控该主操控手时,终端通过获取该主操作手的动作即可获取到手术器械的目的动作,该目的动作即通过末端器械夹的摆动角度和/或俯仰端的俯仰角度表示,具体地,第一器械夹的摆动角度为θ1,第二器械夹的摆动角度为θ2,俯仰端的俯仰角度为θ3。
64.步骤s102,按照预设的计算公式和该手术器械的输入量,计算使得该末端器械夹摆动该摆动角度和/或该俯仰端俯仰该俯仰角度对应的该控制端的位移量;
65.具体的,终端按照预设的计算公式,将第一器械夹的摆动角度为θ1,第二器械夹的摆动角度为θ2,俯仰端的俯仰角度为θ3作为已知量计算控制端的位移量,即能够使得第一器械夹的摆动角度为θ1,第二器械夹的摆动角度为θ2,俯仰端的俯仰角度为θ3对应的第一推杆
的位移量s1、第二推杆的位移量s2和第三推杆的位移量s3。
66.步骤s103,控制驱动装置驱动控制端执行该位移量,以控制末端器械夹摆动摆动角度和/或俯仰端俯仰俯仰角度。
67.具体的,终端控制驱动装置控制对应的推杆执行该位移量,以控制末端器械夹摆动摆动角度和/或俯仰端俯仰俯仰角度,即控制手术器械达到与主操作手对应的姿态。
68.本技术实施例中,待控制的手术器械包括转动连接的末端器械夹、俯仰端和控制端,该手术器械通过末端器械夹的摆动和/或俯仰端的俯仰完成手术操作,需要通过控制端的直线运动驱动末端器械夹的摆动和俯仰端的俯仰,获取与手术器械有运动映射关系的主操作手的动作,得到末端器械夹摆动摆动角度和/或俯仰端俯仰俯仰角度,计算出对应的控制端的直线位移,控制驱动装置驱动该控制端执行该直线位移,从而控制手术器械实现该主操作手的运动,该手术器械的动作维度多,可以实现更复杂的操作,并且大大降低蠕变,提高了使用寿命,上述针对该手术机械的控制方法,通过已知的末端器械夹和俯仰端等关节角度即可得到控制端的直线位移来控制手术器械运动,计算方法简便,计算精度高,提高了对该手术器械的控制精度。
69.参见图7,本发明另一实施例提供的手术器械控制方法的实现流程图。该方法可应用于图1所示的终端100,如图7所示,该方法具体包括:
70.步骤s201,分别建立描述手术器械的俯仰端俯仰运动和末端器械夹摆动的坐标系,分别建立描述该俯仰端俯仰运动和该末端器械夹摆动的运动模型,以及设定手术器械的工作空间范围;
71.以俯仰端的转动轴24的中点为第一坐标系的原点n,以经过第一坐标系的原点n沿俯仰端的转动轴24的方向为第一坐标系的y0轴方向,以第一坐标系的原点n沿平行于控制端30的方向为第一坐标系的z0轴方向,以与y0轴和z0轴符合右手坐标系的方向为第一坐标系的x0轴方向,建立第一坐标系;
72.以末端器械夹的转动轴13的中点为第二坐标系的原点m,以经过第二坐标系的原点m沿末端器械夹的转动轴13的方向为第二坐标系的x轴方向,以第一坐标系的原点n和第二坐标系的原点m连线的方向为第二坐标系的z轴方向,以与x轴和z轴符合右手坐标系的方向为第二坐标系的y轴方向,建立第二坐标系。
73.具体地,参见图8-图10,为末端机械夹、俯仰端、连杆和推杆的三个局部结构不同视图。建立描述该俯仰端俯仰运动的第一坐标系n-x0y0z0,结合前述图2a-图5d等图所示的结构,第一推杆51通过连杆结构40中的第一连杆41、第二连杆42和第三连杆43连接第一器械夹11,通过推拉第一推杆51可控制第一器械夹11摆动,第二推杆52通过连杆结构40中的第四连杆44、第五连杆45和第六连杆46连接第二器械夹12,通过推拉第二推杆52可控制第二器械夹12摆动,第三推杆53通过连杆结构40中的第七连杆47连接俯仰端20,通过推拉第三推杆53可控制俯仰端20俯仰,同时还会使第一器械夹11和第二器械夹12摆动。
74.以俯仰端20相对于控制端30进行俯仰运动时的运动轨迹所形成的平面,作为该第一坐标系的基准坐标平面,建立该第一坐标系。
75.进一步地,以该俯仰端的转动轴的中点为该第一坐标系的原点n,以经过该第一坐标系的原点n沿该俯仰端的转动轴的方向为该第一坐标系的y0轴方向,以该第一坐标系的原点n沿平行于该控制端的方向为该第一坐标系的z0轴方向,以与该y0轴和该z0轴符合右手
坐标系的方向为该第一坐标系的x0轴方向,建立该第一坐标系。
76.具体地,将俯仰端的转动轴24的中点确定为第一坐标系的原点n;将第一坐标系的原点n沿俯仰端的转动轴24指向第二推杆52的方向,确定为第一坐标系的y0轴正方向;将平行于控制端30,且从控制端30指向俯仰端20的方向,确定为第一坐标系的z0轴正方向;将与y0轴正方向和z0轴正方向符合右手坐标系的方向,确定为第一坐标系的x0轴方向;俯仰端20绕y0轴逆时针转动时形成的俯仰角度θ3为正值,俯仰端20绕y0轴顺时针转动时的俯仰角度θ3为负值,俯仰角度θ3如图9所示。
77.进一步地,建立描述末端器械夹摆动的第二坐标系m-xyz,参见图8和图10,图10为末端机械夹和俯仰端的连接结构示意图。
78.以末端器械夹10之间相对摆动时的运动轨迹形成的平面,作为该第二坐标系的基准坐标平面,建立该第二坐标系。
79.进一步地,以该末端器械夹的转动轴的中点为该第二坐标系的原点m,以经过该第二坐标系的原点m沿该末端器械夹的转动轴的方向为该第二坐标系的x轴方向,以该第一坐标系的原点n和该第二坐标系的原点m连线的方向为该第二坐标系的z轴方向,以与该x轴和该z轴符合右手坐标系的方向为该第二坐标系的y轴方向,建立该第二坐标系。
80.具体地,如图8所示,将末端器械夹的转动轴13的中点确定为第二坐标系的原点m,将从第二坐标系的原点m指向第三推杆53的方向确定为第二坐标系的x轴正方向,将从第一坐标系的原点n指向第二坐标系的原点m的方向确定为第二坐标系的z轴正方向,将与x轴正方向和z轴正方向符合右手坐标系的方向确定为第二坐标系的y轴正方向,末端器械夹10绕x轴逆时针摆动时形成的摆动角度θ1和/或θ2为正值,绕x轴顺时针摆动时形成的摆动角度θ1和/或θ2为负值,摆动角度θ1和/或θ2如图10所示。
81.该第一坐标系和该第二坐标系均为空间直角坐标系。
82.设置θ1=θ2=θ3=0时为手术器械位移零点,即此时s1=s2=s3=0。
83.进一步地,建立描述该俯仰端俯仰运动的第一运动模型和末端器械夹摆动的第二运动模型:按照末端器械夹10、俯仰端20和控制端30的运动形态,将俯仰端20、连杆结构40和推杆结构50共同作用的俯仰运动形态等效为第一偏置曲柄滑块机构,以及将末端器械夹10、连杆结构40和推杆结构50共同作用的末端器械夹10的摆动运动形态等效为第二偏置曲柄滑块机构和第三偏置曲柄滑块机构。
84.具体地,参见图9和图11,图11为手术器械中第三传动链等效的第一偏置曲柄滑块机构的原理示意图,图中的0位置为手术器械在执行动作之前的零点位置,俯仰端20与第七连杆47、第三推杆53按顺序通过转动轴首尾连接为第三传动链,该第三传动链的运动即为俯仰端20的俯仰运动,将该第三传动链等效为第一偏置曲柄滑块机构,该第一偏置曲柄滑块机构的运动模式作为第一运动模型,其中,第一偏置曲柄滑块机构的曲柄转动中心为该第一坐标系的原点n,曲柄nb3的长度r3为俯仰端的转动轴24与连杆转动轴48之间的距离,连杆转动轴48连接俯仰端20和第七连杆47。
85.进一步地,该第一偏置曲柄滑块机构的常量包括:曲柄长度r3,即图10中nb3之间的距离;连杆长度l3,即第七连杆47的长度,也即图10中b3a3之间的距离;滑块偏置量e3,e3即为用于连接第三推杆53和第七连杆47的第九连接轴631,与该曲柄转动中心n在该第一坐标系上x0轴上的距离;零点位置下,连接第三推杆53和第七连杆47的第九连接轴631至曲柄转动
中心n在该第一坐标系z0轴上的距离a3;曲柄nb3与俯仰端20的竖中心轴的形状角度α3;该第一偏置曲柄滑块机构在运动中的变量有:俯仰端20的俯仰角θ3,曲柄nb3与该第一坐标系z0负半轴的夹角为负半轴的夹角为随θ3变化而变化。
86.进一步地,建立描述末端器械夹10摆动的第二运动模型,基于末端器械夹10的第一传动链和第二传动链结构相同。手术器械的该第一传动链和该第二传动链从末端机械夹10到控制端30均可等效为第二偏置曲柄滑块机构和第三偏置曲柄滑块机构这两个偏置曲柄滑块机构。
87.参见图9、图12和图13,图12为该第二偏置曲柄滑块机构的原理示意图,图13为该第三偏置曲柄滑块机构的原理示意图,具体地,第二偏置曲柄滑块机构的曲柄转动中心为该第二坐标系的原点m;曲柄的长度为原点m与第一器械夹11和第一连杆41的第一连接轴611的距离,即图12中的me2的距离;以及,原点m与第二器械夹12和第四连杆44的第五连接轴621之间的距离,为便于描述,本实施例选择该第二传动链进行建立该第二运动模型的描述,该第一传动链建立该第二运动模型的原理相同。第一连杆41和第二连杆42通过第二连接轴612转动连接,第四连杆44和第五连杆45通过第六连接轴622连接。
88.该第二偏置曲柄滑块机构的常量包括:曲柄长度r
2-1
,即图12中me2之间的距离;连杆长度l
2-1
,即第四连杆44的长度,也即图12中e2d2之间的距离;滑块偏置量e
2-1
,e
2-1
即为第六连接轴622与该曲柄转动中心m在该第二坐标系上y轴上的距离;m和n之间的距离a
2-1
;曲柄me2与第二器械夹12的夹持面的形状角度α
2_1
;该第二偏置曲柄滑块机构在运动中的变量有:第二器械夹12的摆动角θ2,曲柄me2与该第二坐标系z负半轴的夹角与该第二坐标系z负半轴的夹角随θ2变化而变化;
89.进一步地,该第三偏置曲柄滑块机构的曲柄转动中心为该第一坐标系的原点n,曲柄的长度分别为原点n到第二连杆42和第三连杆43的第三连接轴613的距离,以及,原点n到第五连杆45和第六连杆46的第七连接轴623的距离。
90.为便于描述,下面还是基于该第二传动链进行该第三偏置曲柄滑块机构的描述,该第一传动链的原理相同。参见图9和图13。该第二传动链上的该第三偏置曲柄滑块机构的曲柄转动中心为n点,该第三偏置曲柄滑块机构的常量包括:连杆长度l
2_2
,即,第六连杆46的长度,也即图13中b2a2之间的距离;滑块偏置量e
2_2
,即第六连杆46与第二推杆52的第八连接轴624与曲柄转动中心n在该第一坐标系上y0轴上的距离;零点位置下,第六连杆46与第二推杆52的第八连接轴624至曲柄转动中心n在z0轴上的距离a
2-2
;第七连接轴623与俯仰端20的竖中轴线之间的距离x,该竖中轴线为第五连杆45在该第二避让槽451内滑动时沿滑动方向的中轴线,第七连接轴623为第一连接铰链;第八连接轴624为第二推杆52与第六连杆46的连接铰链;该第三偏置曲柄滑块机构在运动中的变量有:曲柄nb2与第一坐标系的z0负半轴夹角半轴夹角随俯仰端20的俯仰角度θ3变化而变化;曲柄nb2的长度r
2_2
,r
2_2
随第二器械夹12的摆动角θ2变化而变化。
91.进一步地,设定手术器械的工作空间范围:
92.工作空间范围是手术器械运动范围中的一个区域,在范围尽可能大的前提下,工作空间范围的设定需要避让死点位置,死点位置会影响手术器械的使用,手术器械在运动中遇到死点位置会出现卡死的问题,因此在设定工作空间时,需避开死点位置。将该第一偏置曲柄滑块机构、该第二偏置曲柄滑块机构和该第三偏置曲柄滑块机构中的曲柄以及与该
曲柄相连的连杆共线的各位置,确定为该死点位置。
93.根据该第一偏置曲柄滑块机构、该第二偏置曲柄滑块机构和该第三偏置曲柄滑块机构的空间几何关系,按照该工作空间避开各该死点位置的规则,设定该工作空间范围。
94.具体地,在该第三传动链中,该第一偏置曲柄滑块机构有两个死点位置,具体在推或拉第三推杆53以控制俯仰端20的俯仰运动时,会出现两次曲柄与连杆共线的位置,即如图10中的n、b3和a3三点共线时,是该第一偏置曲柄滑块结构的两个死点位置,对应地,俯仰端20的俯仰角度θ3须避开此两个死点位置。即θ3的第一个工作空间范围为:
95.θ
3_min1
《θ3《θ
3_max1
;
96.其中,
97.进一步地,在该第二传动链中,该第二偏置曲柄滑块机构有两个死点位置,具体在推或拉第二推杆52以控制第二器械夹12摆动时,会出现两次曲柄与连杆共线的位置,即如图11中的m、e2和d2三点共线时,是该第二偏置曲柄滑块结构的两个死点位置,对应地,第二器械夹12的摆动角度θ2须避开此两个死点位置。即θ2的工作空间范围为:
98.θ
2_min
《θ2《θ
2_max
;
99.其中,
100.在该第一传动链中,该第二偏置曲柄滑块机构的死点位置与该第二传动链中的死点位置相同,因此,第一器械夹11的摆动角度θ1工作空间范围与θ2相同,即θ1的工作空间范围为:
101.θ
1_min
《θ1《θ
1_max
;
102.其中,
103.进一步地,在该第二传动链中,该第三偏置曲柄滑块机构有两个死点位置,具体为在俯仰端20的俯和仰的两个运动中,第六连杆46与第二避让槽451的中轴线垂直的两个位置,即图13中a2b2与c2d2垂直的位置。对应地,俯仰端20的俯仰角度θ3也须避开此两个死点位置。即θ3的第二个工作空间范围为:
104.θ
3_min2
《θ3《θ
3_max2
;
105.当第一器械夹11的摆动角度θ1取最大值θ
1_max
或第二器械夹12的摆动角度转角θ2取最小值θ
2_min
时,得出如下公式:
[0106][0107]
进一步地,根据该第三偏置曲柄滑块机构的的几何关系,得到:
[0108][0109]
nci=c
idi-ndi[0110]
ncisin(θ
3_max2
)=(l
i_2-x)cos(θ
3_max2
)+e
i_2
[0111]-ncisin(θ
3_min2
)=(l
i_2
+x)cos(θ
3_min2
)-e
i_2
[0112]
其中,n点为该第三偏置曲柄滑块机构的曲柄转动中心;
[0113]
当i=1时,c1为第二连杆42与第三连杆43之间的连接轴613的轴心,c2为第五连杆45与第六连杆46之间的连接轴623的轴心。nci则表示该第三偏置曲柄滑块机构的曲柄转动中心n到该连接轴613的轴心的距离在俯仰端的竖中心轴方向上的分量距离,或者表示该第三偏置曲柄滑块机构的曲柄转动中心n与该连接轴623的轴心的距离在俯仰端的竖中心轴方向上的分量距离。x为连接轴613或连接轴623到俯仰端20的竖中心轴的垂直距离。
[0114]
从而得到:
[0115][0116][0117]
以上,i=1,2,i取值为1表示第一器械夹11,i取值为2表示第二器械夹12;
[0118]
α
1_1
是该第一传动链的该第二偏置曲柄滑块机构中的曲柄与第一器械夹11的夹持面的形状角度;e
1-1
为第一连杆41和第二连杆42的连接轴612,与该第二偏置曲柄滑块机构的曲柄转动中心的距离在y轴上的距离分量;l
1-1
为该第二偏置曲柄滑块机构中连杆长度;r
1-1
为该第一传动链的第二偏置曲柄滑块机构中的曲柄的长度;
[0119]
α
2_1
是该第二传动链的该第二偏置曲柄滑块机构中的曲柄与第二器械夹12的夹持面的形状角度;e
2-1
为第四连杆44和第五连杆45的连接轴622,与该第二偏置曲柄滑块机构的曲柄转动中心的距离在y轴上的距离分量;l
2-1
为该第二偏置曲柄滑块机构的连杆长度;r
2-1
为该第一传动链的第二偏置曲柄滑块机构中的曲柄的长度;
[0120]
a3是该第三传动链的该第一偏置曲柄滑块机构中的曲柄与俯仰端20的竖中心轴的形状角度;e3为第七连杆47和第三推杆53的连接轴,与该第一偏置曲柄滑块机构的曲柄转动中心的距离在x0轴上的距离分量;l3为该第一偏置曲柄滑块机构的连杆长度;r3为该第一偏置曲柄滑块机构中的曲柄的长度;
[0121]ei_2
为该第三偏置曲柄滑块机构的滑块偏置量;l
i_2
为该第三偏置曲柄滑块的连杆长度;nci为该第三偏置曲柄滑块机构的曲柄转动中心与该第三偏置曲柄滑块机构上位于俯仰端之外的连杆结构的连接轴的距离,该距离为在俯仰端的竖中心轴方向上的分量距离,x为该连杆结构的连接轴到该俯仰端的竖中心轴的垂直距离;i=1,2。
[0122]
综上,由于有四个死点位置影响到θ3的工作范围设定,因此选取较小的区间作为最终的工作范围区间,即:
[0123]
max(θ
3_min1
,θ
3_min2
)《θ3《min(θ
3_max1
,θ
3_max2
)。
[0124]
步骤s202,获取被用户操控的主操作手对应的手术器械的输入量;
[0125]
具体的,终端获取第一器械夹的摆动角度为θ1,第二器械夹的摆动角度为θ2,俯仰端的俯仰角度为θ3。
[0126]
步骤s203,判断该手术器械的输入量是否符合该手术器械的工作空间范围;
[0127]
判断θ1、θ2和θ3是否符合步骤s301中的工作空间范围,若符合,执行步骤s304;若不符合,进行错误提示,提示用户重新修正对主操作手的操控,使得该输入量符合该手术器械的工作空间范围。
[0128]
步骤s204,按照预设的计算公式和该输入量,计算使得该末端器械夹摆动该摆动
角度和/或该俯仰端俯仰该俯仰角度对应的该控制端的位移量;
[0129]
一、根据该预设的第一组公式和该输入量中的俯仰端20的俯仰角度θ3,计算第三推杆53的位移量s3的算法如下:
[0130]
根据图10所示的该第一偏置曲柄滑块机构的各参数的几何关系,以及,俯仰端20在该第三传动链的各个参数可得第三推杆53的位移量s3与俯仰角度θ3之间的函数关系s3=f(θ3),可确定如下计算公式:
[0131][0132][0133][0134]
其中,θ3作为输入量是已知量,a3、r3和l3均为已知量、常量;将这些已知量代入上面三个计算公式,计算得到s3。
[0135]
将以上计算公式预设在终端的系统中。
[0136]
二、根据该预设的第二组公式、该输入量中的第二器械夹12的摆动角度θ2和俯仰端20的俯仰角度θ3,计算第二推杆52的位移量s2的算法如下:
[0137]
在手术器械的控制端没有执行任何动作的初始状态的零点位置,该第二偏置曲柄滑块机构的曲柄与该第二坐标系z负半轴的夹角记为
[0138][0139]
根据图12和图13所示的该第三偏置曲柄滑块机构的各参数的几何关系,可确定根据如下公式可计算得到:
[0140][0141]
其中,a
2-2
为该第二传动链的该第三偏置曲柄滑块机构中,滑块位移零点至曲柄转动中心n在z0轴上的距离;a
2-1
为两个曲柄转动中心mn之间的距离,为已知常量;
[0142]
根据该第三偏置曲柄滑块机构的几何关系,还可得到可得计算nd2的长度计算公式如下:
[0143][0144][0145]
nc2=c2d
2-nd2[0146]
c2d2为第二连接铰链d2(d2即为第四连杆44和第五连杆45之间的第六连接轴622)与第一连接铰链b2(b2即为第五连杆45和第六连杆46之间的第七连接轴623)延俯仰端20的竖中心轴方向的距离,为已知常量;
[0147]
nc2为该第三偏置曲柄滑块机构的曲柄转动中心n,与第五连杆45和第六连杆46的第七连接轴623在俯仰端20的竖中心轴方向上的距离;
[0148]
则该第三偏置曲柄滑块机构的曲柄长度r
2_2
:
[0149]
[0150]
根据该第三偏置曲柄滑块机构的几何关系,可得第二推杆52的位移量s2与俯仰端20的俯仰角度θ3和第二器械夹12的摆动角度θ2之间的函数关系s2=f(θ3,θ2),得到如下计算公式:
[0151][0152][0153]
计算得到s2。
[0154]
将以上计算公式预设在终端的系统中。
[0155]
三、根据该预设的计算公式、该输入量中的第一器械夹11的摆动角度θ1和俯仰端20的俯仰角度计算第一推杆51的位移量s1,计算方式与上述计算第二推杆52的位移量s2的算法完全相同,只需在参数设置时,对应将参数的脚标对应修改,以区别计算s2的脚标即可,具体地,计算位移量s1的公式是将上述计算位移量s2的参数中的脚标“2-2”修改为“2-1”,例如a
2-2
修改为a
2-1
,以及将脚标“2-1”修改为“2-2”,例如修改为其余参数以此类推,参数含义以及公式推导过程不再赘述。计算公式如下:
[0156][0157][0158][0159][0160]
nc1=cd-nd1;
[0161][0162][0163][0164]
综上公式可求得第一推杆51的位移量s1。
[0165]
s205,控制驱动装置驱动该控制端执行该位移量,以控制该末端器械夹摆动该摆动角度和/或该俯仰端俯仰该俯仰角度。
[0166]
本技术实施例中,待控制的手术器械包括转动连接的末端器械夹、俯仰端和控制端,该手术器械通过末端器械夹的摆动和/或俯仰端的俯仰完成手术操作,需要通过控制端的直线运动驱动末端器械夹的摆动和俯仰端的俯仰,获取与手术器械有运动映射关系的主操作手的动作,得到末端器械夹摆动摆动角度和/或俯仰端俯仰俯仰角度,计算出对应的控制端的直线位移,控制驱动装置驱动该控制端执行该直线位移,从而控制手术器械实现该主操作手的运动,该手术器械的动作维度多,可以实现更复杂的操作,并且大大降低蠕变,提高了使用寿命,上述针对该手术机械的控制方法,通过已知的末端器械夹和俯仰端等关节角度即可得到控制端的直线位移来控制手术器械运动,计算方法简便,计算精度高,提高
了对该手术器械的控制精度,并且根据该手术器械的死点位置预先设定了能够实现的工作空间范围,避免该手术器械运动到该死点位置卡死而造成的机械故障,提高操作的成功率以及延长该手术器械的使用寿命。
[0167]
参见图14,本技术一实施例提供的手术器械控制装置的结构示意图。为了便于说明,仅示出了与本技术实施例相关的部分。该装置可设置于上述终端100中。该装置包括:
[0168]
获取模块301,用于获取被用户操控的主操作手对应的手术器械的输入量,手术器械包括转动连接的末端器械夹、俯仰端和控制端,手术器械的输入量包括末端器械夹的摆动角度和/或俯仰端的俯仰角度;
[0169]
计算模块302,用于按照预设的计算公式和输入量,计算使得末端器械夹摆动摆动角度和/或俯仰端俯仰俯仰角度对应的控制端的位移量;
[0170]
控制模块303,用于控制驱动装置驱动控制端执行位移量,以控制末端器械夹摆动摆动角度和/或俯仰端俯仰俯仰角度。
[0171]
进一步地,该手术器械控制装置还包括:设置模块304,用于建立描述俯仰端俯仰运动的第一坐标系和描述末端器械夹摆动的第二坐标系;建立描述俯仰端俯仰运动的第一运动模型和末端器械夹摆动的第二运动模型;以及,根据手术器械的结构死点位置,设定手术器械的工作空间范围。
[0172]
设置模块304,还用于以俯仰端相对于控制端进行俯仰运动时的运动轨迹所形成的平面,作为第一坐标系的基准坐标平面,建立第一坐标系;以及,以末端器械夹之间相对摆动时的运动轨迹形成的平面,作为第二坐标系的基准坐标平面,建立第二坐标系;
[0173]
设置模块304,还用于以俯仰端的转动轴的中点为第一坐标系的原点n,以经过第一坐标系的原点n沿俯仰端的转动轴的方向为第一坐标系的y0轴方向,以第一坐标系的原点n沿平行于控制端的方向为第一坐标系的z0轴方向,以与y0轴和z0轴符合右手坐标系的方向为第一坐标系的x0轴方向,建立第一坐标系;
[0174]
以末端器械夹的转动轴的中点为第二坐标系的原点m,以经过第二坐标系的原点m沿末端器械夹的转动轴的方向为第二坐标系的x轴方向,以第一坐标系的原点n和第二坐标系的原点m连线的方向为第二坐标系的z轴方向,以与x轴和z轴符合右手坐标系的方向为第二坐标系的y轴方向,建立第二坐标系。
[0175]
进一步地,控制端包括连杆结构和推杆结构,推杆结构通过连杆结构连接俯仰端,设置模块304,还用于按照末端器械夹、俯仰端和控制端的运动形态,将俯仰端、连杆结构和推杆结构共同作用的俯仰运动形态等效为第一偏置曲柄滑块机构,以及将末端器械夹、连杆结构和推杆结构共同作用的末端器械夹的摆动运动形态等效为第二偏置曲柄滑块机构和第三偏置曲柄滑块机构。
[0176]
进一步地,末端器械夹包括第一器械夹和第二器械夹,推杆结构包括第一推杆、第二推杆和第三推杆,第一推杆和第二推杆分别控制第一器械夹和第二器械夹摆动,第三推杆控制俯仰端俯仰以及第一器械夹和第二器械夹摆动。
[0177]
具体地,设置模块304还用于将俯仰端的转动轴的中点确定为第一坐标系的原点n,将第一坐标系的原点n沿俯仰端的转动轴指向第二推杆的方向,确定为第一坐标系的y0轴正方向,将平行于控制端,且从控制端指向俯仰端的方向,确定为第一坐标系的z0轴正方向,将与y0轴正方向和z0轴正方向符合右手坐标系的方向,确定为第一坐标系的x0轴方向,
将俯仰端绕y0轴逆时针转动时形成的俯仰角度确定为正值;
[0178]
以及,将末端器械夹的转动轴的中点确定为第二坐标系的原点m,将从第二坐标系的原点m指向第三推杆的方向确定为第二坐标系的x轴正方向,将从第一坐标系的原点n指向第二坐标系的原点m的方向确定为第二坐标系的z轴正方向,将与x轴正方向和z轴正方向符合右手坐标系的方向确定为第二坐标系的y轴正方向,将末端器械夹绕x轴逆时针摆动时形成的摆动角度确定为正值。
[0179]
进一步地,设置模块304还用于将第三传动链等效为第一偏置曲柄滑块机构,并将第一偏置曲柄滑块机构的运动模式作为第一运动模型;
[0180]
其中,第一偏置曲柄滑块机构的曲柄转动中心为第一坐标系的原点n,曲柄的长度为俯仰端的转动轴与连杆转动轴之间的距离,连杆转动轴连接俯仰端和第七连杆;
[0181]
将第一传动链和第二传动链分别各自等效为第二偏置曲柄滑块机构和第三偏置曲柄滑块机构,并将第二偏置曲柄滑块机构或第三偏置曲柄滑块机构的运动模式作为第二运动模型;
[0182]
其中,第二偏置曲柄滑块机构的曲柄转动中心为第二坐标系的原点m,曲柄的长度为曲柄转动中心与第一器械夹和第一连杆的连接轴之间的距离,以及,曲柄转动中心与第二器械夹和第四连杆的连接轴之间的距离;
[0183]
第三偏置曲柄滑块机构的曲柄转动中心为第一坐标系的原点n,曲柄的长度分别为原点n到第二连杆和第三连杆的连接轴的距离,以及,原点n到第五连杆和第六连杆的连接轴的距离。
[0184]
进一步地,计算模块302还用于判断手术器械的输入量是否符合手术器械的工作空间范围;若符合,则触发控制模块303执行按照预设的计算公式和输入量,计算使得末端器械夹摆动摆动角度和/或俯仰端俯仰俯仰角度对应的控制端的位移量;若不符合,则触发控制模块303进行错误提示。
[0185]
进一步地,设置模块304还用于将该第一偏置曲柄滑块机构、该第二偏置曲柄滑块机构和该第三偏置曲柄滑块机构中的曲柄以及与该曲柄相连的连杆共线的各位置,确定为该死点位置;根据该第一偏置曲柄滑块机构、该第二偏置曲柄滑块机构和该第三偏置曲柄滑块机构的空间几何关系,按照该工作空间避开各该死点位置的规则,设定该工作空间范围。
[0186]
进一步地,设置模块304还用于设定末端器械夹的第一器械夹的摆动角度θ1的工作空间范围为:
[0187]
θ
1_min
《θ1《θ
1_max
;
[0188]
其中,
[0189]
α
1_1
是第一传动链的第二偏置曲柄滑块机构中的曲柄与第一器械夹的夹持面的形状角度;e
1-1
为第一连杆和第二连杆的连接轴,与第二偏置曲柄滑块机构的曲柄转动中心在y轴上的距离;l
1-1
为第二偏置曲柄滑块机构中连杆长度;r
1-1
为第一传动链的第二偏置曲柄滑块机构中的曲柄的长度;
[0190]
设定末端器械夹的第二器械夹的摆动角度θ2的工作空间范围为:
[0191]
θ
2_min
《θ2《θ
2_max
;
[0192]
其中,
[0193]
α
2_1
是第二传动链的第二偏置曲柄滑块机构中的曲柄与第二器械夹的夹持面的形状角度;e
2-1
为第四连杆和第五连杆的连接轴,与第二偏置曲柄滑块机构的曲柄转动中心在y轴上的距离;l
2-1
为第二偏置曲柄滑块机构的连杆长度;r
2-1
为第一传动链的第二偏置曲柄滑块机构中的曲柄的长度;
[0194]
设定俯仰端的俯仰角度θ3的工作空间范围为:
[0195]
max(θ
3_min1
,θ
3_min2
)《θ3《min(θ
3_max1
,θ
3_max2
);
[0196]
其中,
[0197][0198][0199][0200]
其中,α3是第三传动链的第一偏置曲柄滑块机构中的曲柄与俯仰端的竖中心轴的形状角度;e3为第七连杆和第三推杆的连接轴,与第一偏置曲柄滑块机构的曲柄转动中心在x0轴上的距离;l3为第一偏置曲柄滑块机构的连杆长度;r3为第一偏置曲柄滑块机构中的曲柄的长度;
[0201]ei_2
为第三偏置曲柄滑块机构的滑块偏置量;l
i_2
为第三偏置曲柄滑块的连杆长度;nci为该第三偏置曲柄滑块机构的曲柄转动中心与该第三偏置曲柄滑块机构上位于俯仰端之外的连杆结构的连接轴的距离,该距离为在俯仰端的竖中心轴方向上的分量距离,x为该连杆结构的连接轴到俯仰端的竖中心轴的垂直距离;i=1,2。
[0202]
计算模块302还用于按照预设的第一组公式和俯仰角度,计算得到第三推杆的位移量s3;
[0203]
第一组公式如下:
[0204][0205][0206][0207]
其中,α3是第三传动链的第一偏置曲柄滑块机构中的曲柄与俯仰端的竖中心轴的形状角度;e3为第七连杆和第三推杆的连接轴,与第一偏置曲柄滑块机构的曲柄转动中心在x0轴上的距离;l3为第一偏置曲柄滑块机构的连杆长度;r3为第一偏置曲柄滑块机构中的曲柄的长度;为第一偏置曲柄滑块机构中的曲柄与z0负半轴的夹角;
[0208]
以及,还用于按照预设的第二组公式、末端器械夹中第二器械夹的摆动角度和俯仰端的俯仰角度,计算得到与第二推杆的位移量s2;
[0209][0210][0211]
nc2=c2d
2-nd2;
[0212][0213][0214][0215][0216]
其中,为零点位置时,第二传动链的第二偏置曲柄滑块机构的曲柄与第二坐标系z负半轴的夹角;为第二偏置曲柄滑块机构的曲柄与z负半轴的夹角;为第三偏置曲柄滑块机构的曲柄与第一坐标系z0负半轴的夹角;θ2为第二器械夹的摆动角度;θ3为俯仰端的俯仰角度;a
2-1
为第三偏置曲柄滑块机构的曲柄转动中心n至第二偏置曲柄滑块机构的曲柄转动中心m在z轴上的距离;a
2-2
为在零点位置时,第六连杆和第二推杆的连接轴至曲柄转动中心n在z0轴上的距离;l
2_1
为第二偏置曲柄滑块机构的连杆长度;l
2_2
为第三偏置曲柄滑块机构的连杆长度;r
2_1
为第二偏置曲柄滑块机构中的曲柄的长度;r
2_2
为第二偏置曲柄滑块机构中的曲柄的长度;α
2_1
为第二偏置曲柄滑块机构中的曲柄与第二器械夹的夹持面的形状角度;e
2-1
为第四连杆和第五连杆的连接轴,与第二偏置曲柄滑块机构的曲柄转动中心m在y轴上的距离;e
2_2
为第六连杆和第二推杆的连接轴,与曲柄转动中心n在y0轴上的距离;c2d2为两个连接轴之间沿俯仰端的竖中心轴的距离,两个连接轴分别为第四连杆和第五连杆之间的连接轴,和,第五连杆和第六连杆的连接轴;nc2为第三偏置曲柄滑块机构的曲柄转动中心,与第五连杆和第六连杆的连接轴在俯仰端的竖中心轴方向上的距离;x为第五连杆和第六连杆的连接轴到俯仰端的竖中心轴的垂直距离。
[0217]
本实施例中的其他未尽细节,参见前述各实施例的描述。
[0218]
本技术实施例中,待控制的手术器械包括转动连接的末端器械夹、俯仰端和控制端,该手术器械通过末端器械夹的摆动和/或俯仰端的俯仰完成手术操作,需要通过控制端的直线运动驱动末端器械夹的摆动和俯仰端的俯仰,获取与手术器械有运动映射关系的主操作手的动作,得到末端器械夹摆动摆动角度和/或俯仰端俯仰俯仰角度,计算出对应的控制端的直线位移,控制驱动装置驱动该控制端执行该直线位移,从而控制手术器械实现该主操作手的运动,该手术器械的动作维度多,可以实现更复杂的操作,并且大大降低蠕变,提高了使用寿命,上述针对该手术机械的控制方法,通过已知的末端器械夹和俯仰端等关节角度即可得到控制端的直线位移来控制手术器械运动,计算方法简便,计算精度高,提高了对该手术器械的控制精度,并且根据该手术器械的死点位置预先设定了能够实现的工作空间范围,避免该手术器械运动到该死点位置卡死而造成的机械故障,提高操作的成功率以及延长该手术器械的使用寿命。
[0219]
本实施例还提供了一种电子装置,如图15所示,该电子装置可以包括存储器101和
处理器102。存储器101例如硬盘驱动存储器,非易失性存储器(例如闪存或用于形成固态驱动器的其它电子可编程限制删除的存储器等),易失性存储器(例如静态或动态随机存取存储器等)等,本技术实施例不作限制。处理器102可以是一个或多个微处理器或微控制器。该电子装置可以为上述实施例中的终端100。
[0220]
进一步的,该存储器存储有可执行程序代码,与该存储器101耦合的处理器102,调用该存储器中存储的该可执行程序代码,执行如上述图6和图7所示实施例中描述的手术器械控制方法。
[0221]
其中,该可执行程序代码包括如上述图14所示实施例中描述的手术器械控制装置中的各个模块,例如:获取模块301、计算模块302、控制模块303和设置模块304。
[0222]
进一步的,本发明实施例还提供了一种计算机可读存储介质,该计算机可读存储介质可以是设置于上述各实施例中的电子装置中,该计算机可读存储介质可以是前述图15所示实施例中的存储器101。该计算机可读存储介质上存储有计算机程序,该程序被处理器执行时实现前述图6和图7所示实施例中描述的手术器械控制方法。进一步的,该计算机可存储介质还可以是u盘、移动硬盘、只读存储器(rom,read-only memory)、ram、磁碟或者光盘等各种可以存储程序代码的介质。
[0223]
需要说明的是,对于前述的各方法实施例,为了简便描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本发明并不受所描述的动作顺序的限制,因为依据本发明,某些步骤可以采用其它顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和模块并不一定都是本发明所必须的。
[0224]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其它实施例的相关描述。
[0225]
以上为对本发明所提供的手术器械控制方法、装置及电子装置的描述,对于本领域的一般技术人员,依据本发明实施例的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1