一种骨盆骨折机器人复位的主动变刚度夹持器械
1.本发明属于医疗机器人技术领域,具体涉及一种骨盆骨折机器人复位的主动变刚度夹持器械。
背景技术:
2.骨盆骨折是创伤骨科临床最具挑战性的骨折之一,目前临床复位由医生手工操作,术中医生需把持并保持复位状态,由于骨盆结构复杂,常需多次x光检查效果,复位精度依赖于医生的临床经验。随着机器人技术发展,机器人代替传统手术,具有微创、手术精度高、术后恢复快,医生劳动强度低、医患双方受辐射少等优点。
3.骨盆骨折机器人复位,适用于不稳定性骨盆骨折类型,根据骨折的tile分型,适用于b型或c型骨折。术前需使用夹持器械,将损伤骨盆固定,并与机器人进行牢固连接。(1)由于手术机器人与患者之间的空间非常狭小,夹持器械的结构应非常紧凑。(2)由于骨盆周围软组织的牵拉,通常复位力高达500n,夹持器械易产生变形,导致变形和应力不均,影响机器人复位精度。(3)由于不同患者的骨盆解剖结构参数不同,夹持器械应便于调节,以适用不同患者需要。因此,夹持器械不仅要结构紧凑、满足强度和刚度要求,同时,术中应能具有主动变刚度,适用术中大复位力的要求。目前,关于骨盆骨折机器人复位的变刚度夹持器械方面,未见报道。
技术实现要素:
4.为了解决上述技术问题,本发明提供了一种对不同患者的个性化骨盆及损伤类型进行稳定夹持、提高骨盆骨折机器人复位手术精度的骨盆骨折机器人复位的主动变刚度夹持器械。
5.基于上述目的,本发明通过如下技术方案实现:一种骨盆骨折机器人复位的主动变刚度夹持器械,包括相配合的患侧调节支架模块、健侧固定模块,患侧调节支架模块上设有一对与患侧调节支架模块相连接的电动针杆连接件模块;健侧固定模块包括健侧床夹座,健侧床夹座上设有健侧支杆,健侧支杆上设有健侧球铰座,健侧球铰座上设有一对间隙配合的健侧固定器。
6.优选地,患侧调节支架模块包括患侧球铰座,患侧球铰座上设有对接接口,可与骨盆骨折机器人末端进行快速对接并锁紧,患侧球铰座上设有间隙配合的患侧横杆、患侧球铰横杆,患侧横杆与患侧球铰座固定连接,患侧球铰横杆通过患侧调节器与患侧球铰座相连接。
7.优选地,患侧调节器包括设置在患侧球铰座上的患侧球铰孔,患侧球铰孔与设置在患侧球铰横杆端部的患侧球铰头相配合;患侧球铰座上设有患侧球铰盖板,患侧球铰盖板内套设有与患侧球铰横杆相配合的患侧球铰挡块;患侧球铰座上设有患侧球铰限位销,患侧球铰限位销通过设置在患侧球铰座上与患侧球铰孔相连通的患侧限位孔与患侧球铰头相配合;患侧调节支架模块通过调节患侧球铰横杆与患侧球铰座的角度,提高本夹持器
械的灵活性。
8.优选地,电动针杆连接件模块包括分别与患侧横杆、患侧球铰横杆相连接的横杆夹持组件,横杆夹持组件通过垫片螺柱连接有骨针夹持组件,垫片螺柱套设在横杆夹持组件内与横杆夹持组件转动连接,骨针夹持组件包括与垫片螺柱相连接的一级筒体,一级筒体顶端设有弹性夹头,弹性夹头上设有与弹性夹头螺纹连接的螺母;弹性夹头包括设置在一级筒体顶端的夹头套筒,夹头套筒顶端均布有间隙配合的夹头弹片,夹头弹片一端与夹头套筒相连接,另一端向夹头套筒的中轴线倾斜;横杆夹持组件可绕垫片螺柱轴线旋转调节,通过旋紧螺母与患侧横杆或患侧球铰横杆固连。
9.优选地,一级筒体内套设有与一级筒体间隙配合的二级筒体,二级筒体内套设有内筒保持架,内筒保持架与设置在一级筒体内的直槽相配合;二级筒体内套设有与一级筒体间隙配合的三级筒体。
10.优选地,二级筒体上设有二级调节凸柱,二级调节凸柱与设置在一级筒体上的一级螺旋孔相配合;一级筒体上设有减速电机,减速电机活动端设有齿轮,齿轮与设置在二级筒体上的调节轮齿相啮合,调节轮齿与一级筒体内表面间隙配合;电动针杆连接件模块通过减速电机驱动,实现二级筒体与三级筒体同步伸缩,术中可主动调控夹持器械的刚度。
11.优选地,二级筒体上设有二级螺旋孔,二级螺旋孔与设置在三级筒体上的三级调节凸柱相配合;一级筒体内套设有与二级筒体、三级筒体间隙配合的患侧骨针,患侧骨针与套设在三级筒体内的滚珠衬套滚动配合,患侧骨针顶端与弹性夹头相配合;内筒保持架上设有与三级调节凸柱相配合的内筒直槽;一级筒体上设有与齿轮相配合的齿轮箱体;一级螺旋孔与二级螺旋孔的螺旋方向相反;骨针夹持组件采用减速电机驱动齿轮旋转,带动二级套筒和三级套筒沿患侧骨针轴向移动,二级套筒和三级套筒伸出时用于提高患侧骨针的刚度,实现术中大复位力作用下主动调控夹持器械的刚度。
12.优选地,健侧固定器均包括与健侧球铰座铰连接的健侧球铰横杆,健侧球铰横杆上设有与健侧球铰横杆可调节连接的的针杆连接件,针杆连接件上设有与针杆连接件可调节连接的健侧骨针。
13.优选地,健侧床夹座上设有与健侧支杆相配合的健侧支杆旋钮,健侧床夹座上设有健侧床夹旋钮,健侧床夹旋钮通过健侧床夹垫片与设置在健侧床夹座上的健侧床夹槽相配合。
14.优选地,健侧球铰座远离健侧球铰横杆的一侧设有与健侧支杆相配合的健侧球铰座固定旋钮,靠近健侧球铰横杆的一侧设有与健侧球铰横杆相配合的健侧球铰盖板;健侧球铰座上设有与健侧球铰横杆相配合的健侧球铰限位销,健侧球铰限位销通过设置在健侧球铰座上的健侧限位孔与设置在健侧球铰横杆端部的健侧球铰头相配合,健侧球铰头与设置在健侧球铰座上的健侧球铰孔相配合,健侧球铰孔与健侧球铰盖板相配合;健侧支杆与健侧床夹座连接,通过健侧支杆旋钮压紧固定;健侧球铰座通过两个健侧球铰固定旋钮松紧抱夹,上下调节后固定于健侧支杆;健侧球铰限位销与患侧球铰限位销结构功能类似,调节健侧球铰座内挡块。
15.与现有技术相比,本发明的有益效果如下:本发明的夹持器械,可根据不同患者的骨盆大小、骨折类型,能适应置入骨盆的不同空间位姿的骨针;能实现术中大复位力作用下对夹持器械的刚度主动调控。具有结构紧
凑、调节灵活、主动变刚度、夹持稳定、装拆方便等显著优点。
16.本发明的夹持器械用于固定骨盆的患侧与健侧,健侧固定模块固定骨盆健侧的部分,健侧固定模块可升降与旋转,实现多方位调节,从而能根据患者个性化骨盆结构、骨盆骨折类型,适应置入骨盆不同空间位姿的健侧骨针,实现对损伤骨盆的稳定夹持。电动针杆连接件模块由减速电机驱动二级筒体、三级筒体沿患侧骨针轴向运动,实现术中大复位力作用下对夹持器械的刚度主动调控,减小术中夹持器械的变形不均,改善术中大复位力作用下的应力和应变分布状态,有利于提高骨盆骨折机器人复位手术的精度。患侧调节支架的患侧球铰座上设有机械接口,便于将本发明的夹持器械与骨盆骨折机器人末端进行快速对接。本发明的夹持器械,具有结构紧凑、调节灵活、刚度主动调控、夹持稳定、易装拆等显著优点。
附图说明
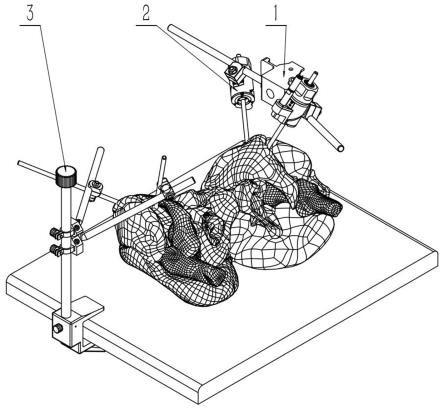
17.图1是实施例1中本发明初始状态下的结构示意图;图2是实施例1中本发明伸长状态下的结构示意图;图3是实施例1中患侧调节支架模块结构示意图;图4是实施例1中电动针杆连接件结构示意图;图5是实施例1中电动针杆连接件伸缩部分结构示意图;图6是实施例1中健侧固定模块结构示意图。
18.图中,患侧调节支架模块1,电动针杆连接件模块2,健侧固定模块3;患侧横杆11,患侧球铰座12,患侧球铰限位销13,患侧球铰挡块14,患侧球铰头15,患侧球铰盖板16,患侧球铰横杆17,骨针夹持组件21,垫片螺柱22,横杆夹持组件23,螺母211,弹性夹头212,减速电机213,一级筒体214,齿轮215,内筒保持架216,二级筒体217,滚珠衬套218,三级筒体219,齿轮箱体2110,一级螺旋孔2111,内筒凸柱2112,内筒直槽2113,二级调节凸柱2114,二级螺旋孔2115,调节轮齿2116,三级调节凸柱2117,健侧床夹旋钮31,健侧床夹垫片32,健侧床夹座33,健侧支杆旋钮34,健侧支杆35,健侧球铰座36,健侧球铰座固定旋钮37,健侧球铰限位销38,健侧球铰盖板39,健侧球铰横杆310,针杆连接件311,健侧骨针312。
具体实施方式
19.以下通过具体实施例对本发明作进一步详细说明,但并不限制本发明的范围。
20.实施例1:一种骨盆骨折机器人复位的主动变刚度夹持器械,其结构如图1-图6所示,包括相配合的患侧调节支架模块1、健侧固定模块3,患侧调节支架模块1上设有一对与患侧调节支架模块1相连接的电动针杆连接件模块2;健侧固定模块3包括健侧床夹座33,健侧床夹座33上设有健侧支杆35,健侧支杆35上设有健侧球铰座36,健侧球铰座36上设有一对间隙配合的健侧固定器。
21.患侧调节支架模块1包括患侧球铰座12,患侧球铰座12上设有间隙配合的患侧横杆11、患侧球铰横杆17,患侧横杆11与患侧球铰座12固定连接,患侧球铰横杆17通过患侧调节器与患侧球铰座12相连接。
22.患侧调节器包括设置在患侧球铰座12上的患侧球铰孔,患侧球铰孔与设置在患侧
球铰横杆17端部的患侧球铰头15相配合;患侧球铰座12上设有患侧球铰盖板16,患侧球铰盖板16内套设有与患侧球铰横杆17相配合的患侧球铰挡块14;患侧球铰座12上设有患侧球铰限位销13,患侧球铰限位销13通过设置在患侧球铰座12上与患侧球铰孔相连通的患侧限位孔与患侧球铰头15相配合。
23.电动针杆连接件模块2包括分别与患侧横杆11、患侧球铰横杆17相连接的横杆夹持组件23,横杆夹持组件23通过垫片螺柱22连接有骨针夹持组件21,骨针夹持组件21包括与垫片螺柱22相连接的一级筒体214,一级筒体214顶端设有弹性夹头212,弹性夹头212上设有与弹性夹头212螺纹连接的螺母211。
24.一级筒体214内套设有与一级筒体214间隙配合的二级筒体217,二级筒体217顶端设有内筒保持架216,内筒保持架216与设置在一级筒体214内的直槽相配合;二级筒体217内套设有与一级筒体214间隙配合的三级筒体219。
25.二级筒体217上设有二级调节凸柱2114,二级调节凸柱2114与设置在一级筒体214上的一级螺旋孔2111相配合;一级筒体214上设有减速电机213,减速电机213活动端设有齿轮215,齿轮215与设置在二级筒体217上的调节轮齿2116相啮合,调节轮齿2116与一级筒体214内表面间隙配合。
26.二级筒体217上设有二级螺旋孔2115,二级螺旋孔2115与设置在三级筒体219上的三级调节凸柱2117相配合;一级筒体214内套设有与二级筒体217、三级筒体219间隙配合的患侧骨针,患侧骨针与套设在三级筒体219内的滚珠衬套218滚动配合,患侧骨针顶端与弹性夹头212相配合;内筒保持架216上设有与三级调节凸柱2117相配合的内筒直槽2113;一级筒体214上设有与齿轮215相配合的齿轮箱体2110。
27.健侧固定器均包括与健侧球铰座36铰连接的健侧球铰横杆310,健侧球铰横杆310上设有与健侧球铰横杆310可调节连接的的针杆连接件311,针杆连接件311上设有与针杆连接件311可调节连接的健侧骨针312。健侧床夹座33上设有与健侧支杆35相配合的健侧支杆旋钮34,健侧床夹座33上设有健侧床夹旋钮31,健侧床夹旋钮31通过健侧床夹垫片32与设置在健侧床夹座33上的健侧床夹槽相配合。健侧球铰座36远离健侧球铰横杆310的一侧设有与健侧支杆35相配合的健侧球铰座固定旋钮37,靠近健侧球铰横杆310的一侧设有与健侧球铰横杆310相配合的健侧球铰盖板39;健侧球铰座36上设有与健侧球铰横杆310相配合的健侧球铰限位销38。
28.本发明的工作原理:
①
、在损伤骨盆患侧髂骨翼与健侧髂骨翼分别置入患侧骨针及健侧骨针312。
29.②
、将健侧床夹座33与健侧支杆35连接,转动健侧床夹旋钮31,健侧床夹旋钮31带动健侧床夹垫片32对健侧床夹座33进行固定,使健侧床夹座33固定于手术床的一侧,转动健侧支杆35至合适角度,扭转健侧支杆旋钮34固定健侧支杆35的位置,将健侧球铰座36调至适当高度,用健侧球铰座固定旋钮37将健侧球铰座36固定,用针杆连接件311将健侧骨针312与健侧球铰横杆310连接,调节健侧球铰限位销38锁定健侧球铰横杆310,健侧球铰盖板39对健侧球铰横杆310进行防护,拧紧、检查健侧固定模块3各连接处的牢固程度。
30.③
、调整患侧调节支架模块1中患侧球铰横杆17与患侧球铰座12的角度,患侧球铰头15在患侧球铰孔内转动,患侧球铰盖板16配合患侧球铰挡块14对患侧球铰横杆17进行防护,患侧球铰横杆17的角度调整完成后,用患侧球铰限位销13通过患侧限位孔对患侧球铰
头15进行固定限位;电动针杆连接件模块2将置入患侧髂骨翼的患侧骨针与患侧调节支架模块1连接,具体步骤为,骨针夹持组件21对患侧骨针进行固定,患侧骨针依次通过三级筒体219、滚珠衬套218、二级筒体217、一级筒体214进入弹性夹头212内,转动螺母211夹紧弹性夹头212,对患侧骨针进行固定夹持,一级筒体214通过垫片螺柱22与横杆夹持组件23连接,横杆夹持组件23绕垫片螺柱22轴线旋转调节,调节后,将横杆夹持组件23分别卡到患侧横杆11、患侧球铰横杆17上,再使用螺母对横杆夹持组件23进行固定,最后拧紧、检查患侧调节支架模块1、电动针杆连接件模块2各连接处的牢固程度。
31.在通过电动针杆连接件模块2对患侧骨针进行刚度主动调控时,减速电机213通过齿轮215与调节轮齿2116啮合,从而带动二级筒体217随齿轮215旋转,二级筒体217内的内筒保持架216上设内筒凸柱2112,内筒凸柱2112沿一级筒体214内的直槽直线移动,二级调节凸柱2114沿一级螺旋孔2111运动时,二级螺旋孔2115随二级筒体217转动,此时内筒保持架216跟随二级筒体217直线运动,内筒直槽2113随内筒保持架216移动,三级调节凸柱2117和二级螺旋孔2115、内筒直槽2113配合,二级筒体217螺旋伸缩时三级筒体219沿直线伸缩,由此实现减速电机213带动二级筒体217、三级筒体219伸缩,从而实现对患侧骨针的主动刚性调控。
32.④
、骨盆固定牢固后,骨盆骨折机器人与患侧调节支架模块1中患侧球铰座12的机械接口进行快速连接,完成本夹持器械与骨盆骨折机器人的连接。
33.实施例2一种骨盆骨折机器人复位的主动变刚度夹持器械,与实施例1的不同之处在于:患侧调节支架模块1包括患侧球铰座12,患侧球铰座12上设有一对呈角度配合的患侧球铰横杆17,患侧球铰横杆17通过患侧调节器与患侧球铰座12相连接,采用患侧球铰横杆17替换患侧横杆11。
34.实施例3一种骨盆骨折机器人复位的主动变刚度夹持器械,与实施例1的不同之处在于:患侧调节支架模块1包括患侧球铰座12,患侧球铰座12上设有一对呈角度配合的患侧横杆11,患侧横杆11与患侧球铰座12固定连接,采用患侧横杆11替换患侧球铰横杆17。
35.实施例4一种骨盆骨折机器人复位的主动变刚度夹持器械,与实施例1的不同之处在于:患侧横杆、患侧球铰横杆间的夹角为α,0
°
≤ α ≤ 135
°
,α可为0
°
、15
°
、30
°
、45
°
、60
°
、75
°
、90
°
、105
°
、120
°
、135
°
中的一个。
36.以上所述仅为本发明的较佳实施例而已,但不仅限于上述实例,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1