脊柱外科术后联动辅助支撑装置
1.本发明涉及脊柱支撑装置技术领域,具体为脊柱外科术后联动辅助支撑装置。
背景技术:
2.脊柱是人体内必不可少的一个部分,脊柱的上端能够连接脑部颅骨,末端能够与尾骨相连接,基本支撑了人体的上半身身体,脊椎手术后一般可在术后一周内下地行走并实现生活自理,术后三个月内恢复正常的生活、工作状态,恢复过程中不要在早期过早锻炼,以免骨折愈合缓慢,给身体带来不适,同时还可利用支撑装置在患者的脊柱处进行支撑,保证患者脊柱姿态的正确性,如授权公告号为cn216603362u所公开的一种脊柱外科术后联动辅助支撑装置,包括伸缩筒,所述伸缩筒设置有若干个,且所述伸缩筒的侧壁上均螺纹连接有紧固栓,相邻所述伸缩筒之间均滑动连接有调节柱,所述调节柱的中部均设置有矩形槽,使用时通过伸缩筒、紧固栓的设置,调整调节柱的伸出伸缩筒长度,再拧紧紧固栓,可以调整支撑装置的整体长度,能够适应不同身高的患者使用,其调整脊柱支撑长度的过程中需要手动介入操作,因此患者不能自行根据自身的身高进行适应调节,至少还需要另一名人员辅助操作,为患者的自行使用带来不便。
技术实现要素:
3.本发明的目的在于提供脊柱外科术后联动辅助支撑装置,以解决上述背景技术中提出辅助支撑装置使用过程中患者难以自行调整操作的问题。
4.为实现上述目的,本发明提供如下技术方案:脊柱外科术后联动辅助支撑装置,包括骨架,所述骨架一侧的外壁上固定有两组凸块,所述凸块一侧的外壁上通过导向支撑件安装有立柱,两组所述立柱的顶端固定有连接条,两组所述立柱的表面通过定位结构分别安装有若干组主收束带、副收束带,所述骨架的内部设置有矩形镂空腔,矩形镂空腔中固定有平板,所述平板表面的一侧固定有矩形传动箱,所述连接条底端的一侧固定有齿条,齿条的底端延伸至矩形传动箱的外部,所述矩形传动箱的内部安装有旋转驱动单元,旋转驱动单元通过齿轮自锁结构带动齿条升降,所述平板表面的一侧安装有电机控制器,电机控制器的输出端与旋转驱动单元的输入端电性连接。
5.优选的,所述导向支撑件为固定在凸块一侧外壁上的中空管套,所述立柱滑动安装在中空管套中。
6.优选的,所述定位结构为固定在主收束带、副收束带背面一端的缺口式环状抱箍,以及设置在立柱背面竖直方向上的若干组等距定位孔,所述定位孔中安装有定位销,定位销的螺纹端延伸至缺口式环状抱箍中。
7.优选的,所述骨架一侧的外壁上设置有弧形内凹槽。
8.优选的,所述旋转驱动单元为安装在矩形传动箱一侧内壁上的伺服电机,伺服电机的输入端与电机控制器的输出端电性连接。
9.优选的,所述齿轮自锁结构为安装在伺服电机输出端的蜗杆,以及转动安装在矩
形传动箱一侧内壁上的中心轴,所述中心轴表面的两端分别安装有主动齿轮和蜗轮盘,蜗轮盘和蜗杆相互啮合,主动齿轮和齿条相互啮合。
10.优选的,所述连接条顶端的一侧固定有橡胶凸柱,所述连接条顶端的两侧皆开设有沉孔,两组所述立柱的顶端开设有和沉孔位置相互对应的内螺纹孔,所述沉孔的内部安装有十字槽盘头自攻螺钉,十字槽盘头自攻螺钉和立柱顶端的内螺纹孔相互配合。
11.与现有技术相比,本发明的有益效果是:该脊柱外科术后联动辅助支撑装置通过设置有连接条和电机控制器等相互配合的结构,通过电机控制器控制矩形传动箱中的伺服电机工作,由齿轮自锁结构驱动齿条、连接条以及立柱等部件上行,利用延长后的骨架、立柱作为脊柱支撑件,蜗杆、蜗轮盘的自锁属性可保证装置的脊柱支撑长度,随后将主收束带、副收束带从后背绕于胸前,利用骨架、立柱矫正患者的脊柱,其使用过程中患者单人即可完成佩戴工作,无需外部辅助操作进行,为患者的自行使用提供便捷。
附图说明
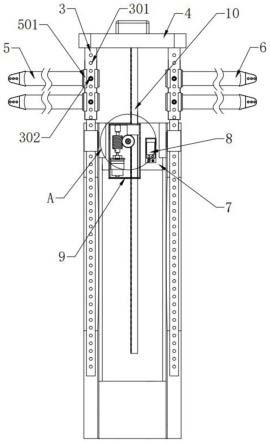
12.图1为本发明的后视结构示意图;
13.图2为本发明的侧视结构示意图;
14.图3为本发明图1中a处放大结构示意图;
15.图4为本发明的骨架立体结构示意图;
16.图5为本发明的连接条俯视结构示意图;
17.图中:1、骨架;101、弧形内凹槽;102、矩形镂空腔;2、凸块;201、中空管套;3、立柱;301、定位孔;302、定位销;4、连接条;401、橡胶凸柱;402、沉孔;403、十字槽盘头自攻螺钉;5、主收束带;501、缺口式环状抱箍;6、副收束带;7、平板;8、电机控制器;9、矩形传动箱;901、中心轴;902、蜗轮盘;903、伺服电机;904、蜗杆;10、齿条。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.请参阅图1-5,本发明提供的一种实施例:脊柱外科术后联动辅助支撑装置,包括骨架1,骨架1一侧的外壁上设置有弧形内凹槽101,骨架1一侧的外壁上固定有两组凸块2,凸块2一侧的外壁上通过导向支撑件安装有立柱3,两组立柱3的顶端固定有连接条4,两组立柱3的表面通过定位结构分别安装有若干组主收束带5、副收束带6,患者利用相应组数的主收束带5、副收束带6将骨架1、立柱3束缚在病患的脊柱处,主收束带5、副收束带6从后背绕于胸前,保证装置在使用过程中的牢固性;
20.骨架1的内部设置有矩形镂空腔102,矩形镂空腔102中固定有平板7,平板7表面的一侧固定有矩形传动箱9,连接条4底端的一侧固定有齿条10,齿条10的底端延伸至矩形传动箱9的外部,矩形传动箱9的内部安装有旋转驱动单元,旋转驱动单元通过齿轮自锁结构带动齿条10升降,平板7表面的一侧安装有电机控制器8,电机控制器8的输出端与旋转驱动单元的输入端电性连接,通过电机控制器8控制矩形传动箱9中的旋转驱动单元工作;
21.旋转驱动单元为安装在矩形传动箱9一侧内壁上的伺服电机903,伺服电机903的
输入端与电机控制器8的输出端电性连接,电机控制器8控制伺服电机903的正方旋转方向,齿轮自锁结构为安装在伺服电机903输出端的蜗杆904,以及转动安装在矩形传动箱9一侧内壁上的中心轴901,中心轴901表面的两端分别安装有主动齿轮和蜗轮盘902,蜗轮盘902和蜗杆904相互啮合,主动齿轮和齿条10相互啮合,升降过程中蜗杆904、蜗轮盘902的自锁属性可维持住齿条10、立柱3的升降位置,避免立柱3、齿条10等部件自行下行移动,保证装置的脊柱支撑长度;
22.由电机控制器8开启伺服电机903工作,使得伺服电机903依次驱动蜗杆904、蜗轮盘902回转,使得蜗轮盘902带动中心轴901、主动齿轮回转,利用主动齿轮驱动齿条10进行升降,当齿条10被主动齿轮驱动上行时,齿条10通过连接条4带动两组立柱3一同向上滑动,从而调整骨架1、立柱3的整体长度,利用延长后的骨架1、立柱3作为脊柱支撑件;
23.导向支撑件为固定在凸块2一侧外壁上的中空管套201,立柱3滑动安装在中空管套201中,中空管套201、凸块2作为立柱3的升降导向,提高立柱3、连接条4在竖直方向上的升降稳定性;
24.定位结构为固定在主收束带5、副收束带6背面一端的缺口式环状抱箍501,以及设置在立柱3背面竖直方向上的若干组等距定位孔301,定位孔301中安装有定位销302,定位销302的螺纹端延伸至缺口式环状抱箍501中;
25.患者根据安装需要在立柱3上布置相应的主收束带5、副收束带6,患者自行取出主收束带5,使得主收束带5端部的缺口式环状抱箍501扣在立柱3上,随后利用定位销302将缺口式环状抱箍501锁止在立柱3上即可;
26.连接条4顶端的一侧固定有橡胶凸柱401,连接条4顶端的两侧皆开设有沉孔402,两组立柱3的顶端开设有和沉孔402位置相互对应的内螺纹孔,沉孔402的内部安装有十字槽盘头自攻螺钉403,十字槽盘头自攻螺钉403和立柱3顶端的内螺纹孔相互配合,使用者可将十字槽盘头自攻螺钉403从沉孔402中退出,即十字槽盘头自攻螺钉403不再对连接条4、立柱3进行连接,此时使用者分离连接条4以及立柱3,使得立柱3的顶端无阻挡物,随后取出主收束带5,使得主收束带5端部的缺口式环状抱箍501竖直套装在立柱3上,其套装数量由使用者的固定需求而定,相比于缺口式环状抱箍501、立柱3扣装的形式,该种结构装配快捷方便,为使用者的日常操作提供便捷,当主收束带5、立柱3连接完毕后,再次利用十字槽盘头自攻螺钉403对连接条4、立柱3锁止即可。
27.本技术实施例在使用时,首先患者根据自身的使用习惯以及身高特征调整装置的整体支撑长度,即患者将装置立起,随后通过电机控制器8控制矩形传动箱9中的旋转驱动单元工作,即电机控制器8控制伺服电机903的正方旋转方向,由电机控制器8开启伺服电机903工作,使得伺服电机903依次驱动蜗杆904、蜗轮盘902回转,使得蜗轮盘902带动中心轴901、主动齿轮回转,利用主动齿轮驱动齿条10进行升降,当齿条10被主动齿轮驱动上行时,齿条10通过连接条4带动两组立柱3一同向上滑动,该过程中中空管套201、凸块2作为立柱3的升降导向,提高立柱3、连接条4在竖直方向上的升降稳定性,从而调整骨架1、立柱3的整体长度,利用延长后的骨架1、立柱3作为脊柱支撑件,随后患者利用相应组数的主收束带5、副收束带6将骨架1、立柱3束缚在病患的脊柱处,主收束带5、副收束带6从后背绕于胸前,保证装置在使用过程中的牢固性,利用骨架1、立柱3矫正患者的脊柱,其使用过程中患者单人即可完成佩戴工作,无需外部辅助操作进行,为患者的自行使用提供便捷。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1