手术机器人踏板指示方法、系统、可读介质及手术机器人与流程
本发明涉及医疗器械,特别涉及一种手术机器人踏板指示方法、系统、可读介质及手术机器人。
背景技术:
1、手术机器人系统的应用,解决了外科手术微创伤化及精细化的临床需求。一般地,手术机器人系统主要包括主端医生控制台和从端患者手术平台。手术时,医生在主端医生控制台处通过二维或三维的显示设备观察患者体内的组织特征,并以主从遥操作的方式操控主端医生控制台上的主操作手和踏板,通过主从映射驱动从端患者手术平台上的机械臂及手术工具器械来完成手术的操作。医生能够以与传统手术相似的方式及感觉来完成手术操作,大大减轻了医生进行手术时的困难程度,同时也提高了手术的效率和安全性,并使得远程手术的实现发生了突破性的进展。利用手术机器人系统进行手术,患者的创口小,出血少,恢复快,大大缩短了患者术后住院时间,术后存活率和康复率也能明显提高,受到广大医患的青睐,现在作为一种高端医疗器械,已广泛运用于各种临床手术中。
2、然而,手术机器人系统的主端医生控制台的踏板一般需要医生用脚踩踏,目前并没有有效的脚踏踩踏位置的指示方法,都是通过一定的物理布局以及在使用时通过医生低头查看的方式来反复查看来确认实际脚踏位置是否合适和正确。一些应用场景下,有可能出现误踏的情况,造成患者受伤害;此外医生反复查看踩踏位置的方式,也可能引起医生操作信心的不足,影响医生操作体验。
技术实现思路
1、本发明的目的在于提供一种手术机器人踏板指示方法、系统、可读介质及手术机器人,以解决现有的手术机器人系统无法对脚踏位置进行指示的问题。
2、为解决上述技术问题,本发明提供一种手术机器人踏板指示方法,其包括:
3、获取踏板区域的三维图像;
4、根据所述三维图像,识别得到踏板和目标对象;
5、基于识别得到的所述踏板和所述目标对象,得到所述踏板和所述目标对象在空间中的相对位置信息;
6、根据所述相对位置信息,若所述目标对象在所述踏板的预触发区域内,则输出当前所述踏板的预触发信息。
7、可选的,基于识别得到的所述踏板和所述目标对象,得到所述踏板和所述目标对象在空间中的相对位置信息的步骤包括:
8、将所述三维图像中的所述踏板和所述目标对象的影像依次通过像素坐标系、图像坐标系、相机坐标系和世界坐标系进行转换,分别得到所述踏板和所述目标对象在空间中的坐标信息;
9、根据所述踏板和所述目标对象在空间中的坐标信息得到所述踏板和所述目标对象在空间中的相对位置信息。
10、可选的,在所述手术机器人踏板指示方法中,连续地监测所述踏板区域,获取所述踏板区域的多帧的所述三维图像,并得到所述踏板和所述目标对象在空间中的实时的所述相对位置信息;
11、根据实时的所述相对位置信息,若所述目标对象自所述踏板的预触发区域外向所述预触发区域移动,并进入所述预触发区域,则输出当前所述踏板的预触发信息。
12、可选的,所述踏板区域具有高度边界和水平边界;
13、根据所述相对位置信息,若所述目标对象在所述高度边界和所述水平边界内,则于显示设备上显示提示信息;若所述目标对象在所述高度边界或所述水平边界外,则于所述显示设备上隐藏所述提示信息。
14、可选的,所述提示信息包括:所述目标对象和所述踏板的虚拟图像和/或所述预触发信息。
15、可选的,所述提示信息包括所述预触发信息,所述预触发区域相对于所述踏板具有第一高度边界、第二高度边界,其中第二高度边界相对所述第一高度边界更靠近所述踏板;
16、所述预触发信息包括第一信号和第二信号,若所述目标对象在所述第一高度边界内,则输出所述第一信号;若所述目标对象在所述第二高度边界内,则输出所述第二信号。
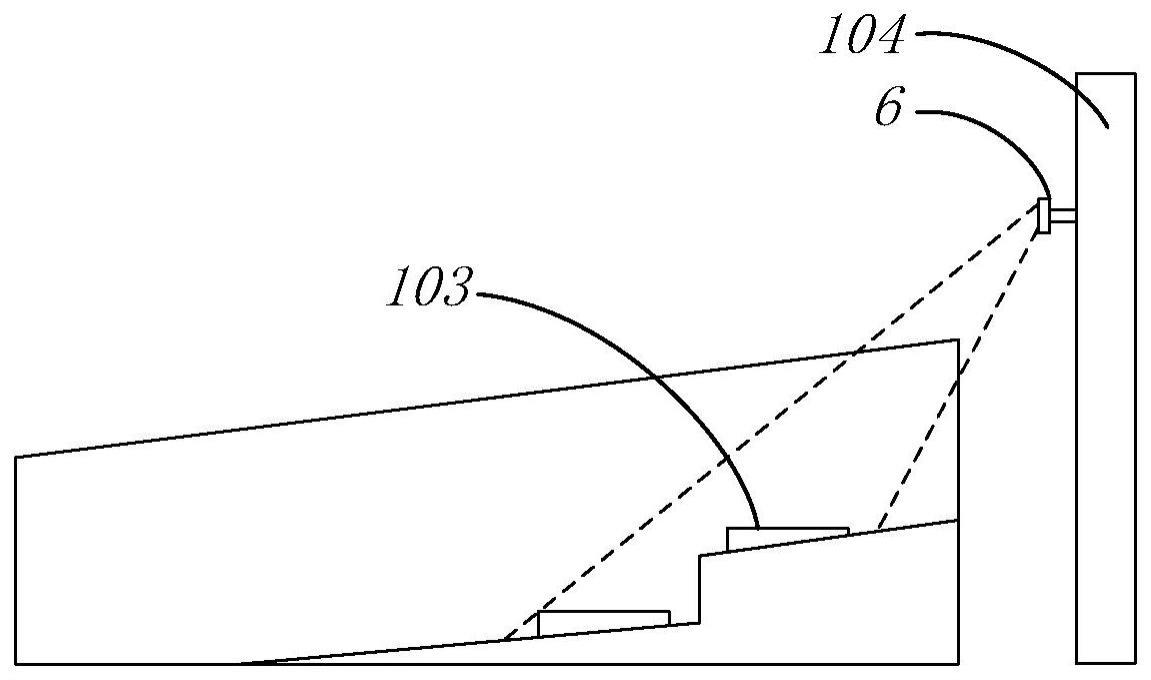
17、为解决上述技术问题,本发明还提供一种手术机器人踏板指示系统,其包括三维深度相机和控制装置;
18、所述三维深度相机用于获取踏板区域的三维图像,并传输至所述控制装置;
19、所述控制装置用于根据获取的所述三维图像,识别得到踏板和目标对象;并基于识别得到的所述踏板和所述目标对象,得到所述踏板和所述目标对象在空间中的相对位置信息;
20、所述控制装置还用于根据所述相对位置信息进行判断,若所述目标对象在所述踏板的预触发区域内,则输出当前所述踏板的预触发信息。
21、可选的,所述三维深度相机至少包括两个间隔布置的成像模块。
22、可选的,所述手术机器人踏板指示系统还包括显示设备,所述显示设备用于显示所述目标对象和所述踏板的虚拟图像和/或所述预触发信息。
23、为解决上述技术问题,本发明还提供一种可读存储介质,其上存储有程序,所述程序被执行时实现根据如上所述的手术机器人踏板指示方法的步骤。
24、为解决上述技术问题,本发明还提供一种手术机器人系统,其包括踏板,还包括如上所述的手术机器人踏板指示系统。
25、综上所述,在本发明提供的手术机器人踏板指示方法、系统、可读介质及手术机器人中,所述手术机器人踏板指示方法包括:获取踏板区域的三维图像;根据所述三维图像,识别得到踏板和目标对象;基于识别得到的所述踏板和所述目标对象,得到所述踏板和所述目标对象在空间中的相对位置信息;根据所述相对位置信息,若所述目标对象在所述踏板的预触发区域内,则输出当前所述踏板的预触发信息。
26、如此配置,可以在目标对象(如医生的脚部)踩踏踏板前确认两者的相对位置,若目标对象在所述踏板的预触发区域内,则输出当前踏板的预触发信息,用户体验更好,且不需要对踏板的硬件和布局进行改动,不影响医生原有的操作习惯,解决了医生踩踏位置不明确以及在使用时需要反复确认踩踏位置的问题。
技术特征:
1.一种手术机器人踏板指示方法,其特征在于,包括:
2.根据权利要求1所述的手术机器人踏板指示方法,其特征在于,基于识别得到的所述踏板和所述目标对象,得到所述踏板和所述目标对象在空间中的相对位置信息的步骤包括:
3.根据权利要求1所述的手术机器人踏板指示方法,其特征在于,连续地监测所述踏板区域,获取所述踏板区域的多帧的所述三维图像,并得到所述踏板和所述目标对象在空间中的实时的所述相对位置信息;
4.根据权利要求1所述的手术机器人踏板指示方法,其特征在于,所述踏板区域具有高度边界和水平边界;
5.根据权利要求4所述的手术机器人踏板指示方法,其特征在于,所述提示信息包括:所述目标对象和所述踏板的虚拟图像和/或所述预触发信息。
6.根据权利要求4所述的手术机器人踏板指示方法,其特征在于,所述提示信息包括所述预触发信息,所述预触发区域相对于所述踏板具有第一高度边界、第二高度边界,其中第二高度边界相对所述第一高度边界更靠近所述踏板;
7.一种手术机器人踏板指示系统,其特征在于,包括:三维深度相机和控制装置;
8.根据权利要求1所述的手术机器人踏板指示系统,其特征在于,所述三维深度相机至少包括两个间隔布置的成像模块。
9.根据权利要求1所述的手术机器人踏板指示系统,其特征在于,还包括显示设备,所述显示设备用于显示所述目标对象和所述踏板的虚拟图像和/或所述预触发信息。
10.一种可读存储介质,其特征在于,其上存储有程序,其特征在于,所述程序被执行时实现根据权利要求1~6中任一项所述的手术机器人踏板指示方法的步骤。
11.一种手术机器人系统,其特征在于,包括踏板,其特征在于,所述手术机器人系统还包括根据权利要求7~9中任一项所述的手术机器人踏板指示系统。
技术总结
本发明提供一种手术机器人踏板指示方法、系统、可读介质及手术机器人,所述手术机器人踏板指示方法包括:获取踏板区域的三维图像;根据所述三维图像,识别得到踏板和目标对象;基于识别得到的所述踏板和所述目标对象,得到所述踏板和所述目标对象在空间中的相对位置信息;根据所述相对位置信息,若所述目标对象在所述踏板的预触发区域内,则输出当前所述踏板的预触发信息。如此配置,可以在目标对象(如医生的脚部)踩踏踏板前确认两者的相对位置,若目标对象在所述踏板的预触发区域内,则输出当前踏板的预触发信息,用户体验更好,且不影响医生原有的操作习惯,解决了医生踩踏位置不明确以及在使用时需要反复确认踩踏位置的问题。
技术研发人员:请求不公布姓名
受保护的技术使用者:上海微创医疗机器人(集团)股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!