一种具有神经监测功能的骨科手术机器人的制作方法
1.本实用新型属于医疗器械领域,具体涉及一种具有神经监测功能的骨科手术机器人。
背景技术:
2.具有手术导航系统的外科手术机器人是集机械电子、影像学、外科临床等诸多技术于一体的综合医疗手术设备,目前已应用于神经系统、心血管系统、消化系统、泌尿系统、骨外科等手术中。手术导航系统将病人术前或术中影像数据和手术床上病人解剖结构准确对应,手术中跟踪手术器械并将手术器械的位置在病人影像上以虚拟探针的形式实时更新显示,使医生对手术器械相对病人解剖结构的位置一目了然,使外科手术更快速、更精确、更安全。
3.然而在一些神经外科手术或是骨外科中,手术部位及附近存在丰富的神经组织,手术导航系统不显示神经定位,即使使用精细操作的外科手术机器人也存在盲打盲切误伤神经的风险。
4.椎管狭窄是由于椎孔或椎间孔不正常狭窄而压迫到脊髓或神经根的一种状态。椎管狭窄以腰椎狭窄最常见,其次是颈椎狭窄。腰椎椎管狭窄引起的症状包括下肢的疼痛、感觉异常、肌肉减弱、步行困难,症状渐进发展,严重时影响到尿失禁、排便困难和性功能障碍。椎管狭窄的成因很多,包括退化性椎间盘疾病(degenerative disc disease)、脊髓肿瘤、创伤、类风湿性关节炎、遗传性疾病。最为多见的退化性腰椎椎管狭窄,人群发病率50-65岁达8%,65岁以上人群发病率达20%。传统开放椎板切除减压术具有疗效确定的优点,但对脊柱稳定性影响较大,常需内固定和融合,其存在手术创伤大、并发症较多等缺点。
5.现有技术下,椎管减压手术过程中,手术入路从椎板间入,内镜下使用高速磨钻、椎板咬骨钳等手术器械切除椎板骨性结构,达到椎管成形减压的目的。然而手术对操作的精细程度要求很高,控制不好容易伤到脊髓。
技术实现要素:
6.本实用新型针对现有技术不足,提供了一种具备神经监测功能的骨科手术机器人,能够监测术中神经电生理信号,进行神经功能定位和功能评估,辅助指导手术操作,避免损伤神经,提高手术的安全性。
7.本实用新型具体技术方案如下:
8.一种具有神经监测功能的骨科手术机器人,包括主控系统、机械臂/操纵杆、末端执行器和与末端执行器相配的骨科手术器械以及神经功能监测系统,末端执行器和/或骨科手术器械上具有神经监测元件,神经功能监测系统通过神经监测元件探测并处理患者手术部位的阻抗信号和/或神经电生理信号,并将信号反馈给主控系统,主控系统根据阻抗信号特点和/或神经电生理信号的有无、强弱或者信号特征,控制机械臂/操纵杆和/或末端执行器的运动或停止,或者调整机械臂/操纵杆和/或末端执行器的运动轨迹,所述骨科手术
器械选自导引管、导丝、线状骨锉中的一种或几种,所述导引管、导丝的头端、线状骨锉的表面设有至少一个神经监测元件。
9.所述主控系统包括计算机中央控制系统,机械驱动主机,手术操作监视器、机器人控制监视器、操作手柄和输入输出等设备。手术时,外科医生可通过主控系统控制操作手柄,手部动作传达到机械臂/操纵杆的尖端,完成手术操作,或者手术机器人根据预设程序或者人工智能系统实现自动化无人操作。
10.所述神经功能监测系统包括对电生理信号(如阻抗)或神经电生理信号的采集、刺激、计算分析、处理的设备或模块(如:阻抗监测仪、神经功能监测仪或者具有相同功能的模块)。
11.所述神经监测元件能够传出和/或传入信号,通过对阻抗信号的探测区分骨组织、神经组织或其他软组织;或者探测神经因被直接或间接刺激而产生的神经电生理信号,定位神经精确位置。
12.所述神经监测元件设于手术器械的端部、表面或外缘中的一种或几种,导线埋设于手术器械内部。末端执行器内设有与神经功能监测系统电路连接的导线,末端执行器上设有与神经监测元件的电路连接的接口。优选的,电路连接的接口设于末端执行器与手术器械固定接触处。
13.进一步的,所述神经功能监测系统记录并存储记忆术中阻抗信号和/或神经电生理信号形成患者的神经定位信息,主控系统根据神经定位的信息规划、调整机械臂/操纵杆和/或末端执行器的运动轨迹。
14.优选的,所述骨科手术机器人还包括手术导航系统,主控系统根据手术导航系统的影像信号(如三维数字化影像)以及神经功能监测系统的阻抗信号和/或神经电生理信号,控制机械臂/操纵杆和/或末端执行器的运动或停止,或者调整机械臂/操纵杆和/或末端执行器的运动轨迹。
15.所述手术导航系统包括对图像进行采集、处理的设备或模块,例如内窥镜、超声、x光、ct或mri扫描装置或模块,以及对图像进行处理的软件系统或模块。
16.本实用新型所述神经监测元件选自电极、传感器、传感性能的外包膜、传感性能贴片或涂层、具有传导神经信号的介质制成的传导通路中的一种或几种,所述介质包括但不限于金属、光、声、石墨烯、新介质材料等以上一种或几种中的一种或几种。
17.优选的,本实用新型所述骨科手术机器人,所述线状骨锉为扁平带状,具有工作部和牵拉部,工作部表面具有锉磨纹路,如磨砂颗粒状、齿状、斜纹状纹路等,背面(与非手术部位组织接触面)光滑。工作部表面上设有至少一个神经监测元件。所述牵拉部具有与手术机器人的末端执行器固定的固定孔或固定件,神经监测元件的导线可经固定孔或固定件与手术机器人末端执行器的电路接口连接。
18.使用时,线状骨锉的工作部表面贴合骨骼,牵拉部受手术操作者或手术机器人牵拉,光滑的背面能够保证锉磨骨骼(如椎板)时,避免误伤神经或其他组织。与神经监测元件连接的导线埋设于骨锉内部,使用时与具有阻抗监测和/或神经功能监测系统的手术机器人连接。所述神经监测元件能够传出和/或传入信号,通过对阻抗信号的探测区分骨组织、神经组织或其他软组织;或者探测神经因被直接或间接刺激而产生的神经电生理信号,定位神经精确位置。当骨锉工作面探测到神经组织的阻抗信号或神经电生理信号时,神经监
测元件能够将探测到的信号传输至手术机器人的主控系统,主控系统控制机械臂/操纵杆和/或末端执行器停止锉磨。
19.骨锉的长度和宽度可以有多种规格。
20.优选的,本实用新型所述的骨锉具有柔性,一个优选的方案,所述工作部包括锉磨区和边框,边框与锉磨区外缘固定,所述锉磨区为两个或两个以上锉片纵向(沿骨锉延伸方向)排列或纵向及横向柔性连接形成的节链状条带,每个锉片的工作面具有锉磨纹路,背面光滑,牵拉部设于工作部两端,与边框固连。
21.采用两个或两个以上锉片纵向排列时,锉片与边框固定即可,锉片之间无连接也可以交联。采用多个锉片纵向及横向交联时,锉磨区外缘的锉片与边框固定,内部的锉片柔性连接,锉片之间可以相对于连接处发生转动形成角度,锉片之间可以采用常用的柔性连接方式,例如铰接、万向连接等。
22.每个锉片的工作表面具有锉磨纹路,背面光滑。该设计能够使骨锉具有更好的柔性,紧密贴合骨骼(如椎板)表面,提高锉磨的效率和效果。
23.优选的,所述锉片相互连接形成镂空的网状条带,或者锉片相互连接或与边框固定形成栅状条带。该设计不仅能增加骨锉的柔性,同时还能够方便冲洗锉磨过程中产生的骨屑及软组织杂质颗粒。
24.优选的,骨锉工作表面设有由粗至细的不同锉纹。该设计能够更为精细地锉磨椎板,避免粗糙的表面损伤神经或其他软组织。
25.优选的,所述骨锉非工作面具有柔性绝缘保护层。
26.优选的,所述牵拉部为中空软管,所述锉磨区内部设有与中空软管同轴的贯通孔道。导丝可穿入中空软管和孔道,引导骨锉。
27.以椎管减压手术为例,结合导引管、导丝和线状骨锉对本实用新型所述手术机器人的使用过程进行说明。具体步骤为:
28.(1)利用导引管头端穿入椎间孔,并利用导引管的硬度松解黄韧带与锥板的缝隙;
29.(2)将导丝与线状骨锉固定(例如,导丝可穿入骨锉牵拉部的中空软管和锉磨区孔道后,与骨锉固定),导丝一端沿导引管内穿入,骨锉随导丝通过黄韧带、经关节突、穿椎间孔,弯曲穿过锥板;
30.(3)线状骨锉到达手术部位后,解除与导丝的连接,导引管先行退出,导丝再退出锥板缝隙。导引管、导丝、线状骨锉上的神经监测元件在执行上述操作过程中进行实时监测;
31.(4)线状骨锉的固定孔或固定件与外科手术机器人的末端执行器固定,同时神经监测元件也与手术机器人的神经功能监测系统电路连接。使用手术机器人利用骨锉进行磨骨时,神经监测元件实时监测骨锉触及组织的阻抗和/或神经电生理信号,阻抗信号显示为非神经组织或无神经电生理信号时,机械臂带动骨锉工作,椎间孔扩大,达到减压目的,一旦探测到信号,机械臂立即停止工作,避免神经损伤。
32.本实用新型优点:
33.1.手术流程的最大风险是操作中误伤神经系统,造成病人永久性功能丧失,例如瘫痪、下肢行走运动功能丧失。本实用新型所述手术机器人在使用手术器械进行外科手术的同时,实时监测手术部位的阻抗和/或神经电生理信号,探测到非神经组织的阻抗信号或
无神经电生理信号时,机械臂/操纵杆和/或末端执行器正常运动,当探测到神经组织的阻抗信号或神经电生理信号时,发出探测警报的同时立即停止工作。神经功能监测系统记忆、记录术中神经电生理信号形成患者的神经定位信息,可根据定位信息将机械臂/操纵杆和/或末端执行器调整至新的非神经组织的位置后再进行手术操作,同时根据已经记录的神经定位信息指导建立机械臂/操纵杆和/或末端执行器新的运动轨迹,避开已经定位的神经位点,使手术更为顺畅。
34.2.本实用新型所述骨科手术机器人还可以结合手术导航系统的影像信号以及神经功能监测系统的阻抗和/或神经电生理信号,协同控制机械臂/操纵杆和/或末端执行器的运动或停止,或者调整机械臂/操纵杆和/或末端执行器的运动轨迹。
35.3.本实用新型所述骨科手术机器人,配合使用具有神经监测元件的导引管、导丝、线状骨锉,用于骨科手术,如椎管减压手术。该骨科手术机器人将手术最高风险的减压操作彻底转变,从机械性去除骨组织,转变为片状的锉纹贴合骨组织,进行摩擦,一点一点磨去骨组织。去除骨组织的厚度能够以毫米等级控制,完全避开手术工具操作的空间要求,完全不损伤脊髓和脊神经根的前提下,达到减压手术目的。该设计避免了现有技术使用高速磨钻、椎板咬骨钳切除椎板存在损伤神经的风险。采用骨锉锉磨椎板,操作简单,工作面只与椎板接触,具有更高的安全性。
附图说明
36.图1为本实用新型所述手术机器人系统连接示意图。
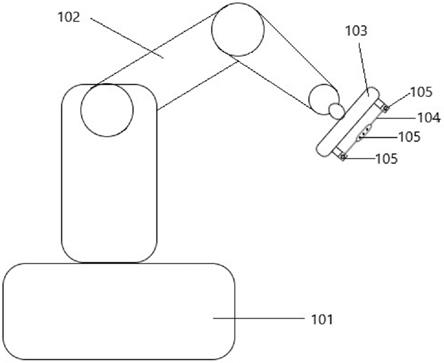
37.图2为本实用新型所述手术机器人结构示意图。
38.图3为本实用新型所述线性骨锉的结构示意图。
39.图4为本实用新型所述骨科手术装置示意图。
具体实施方式
40.以下通过实施例说明本实用新型的具体步骤,但不受实施例限制。
41.在本实用新型中所使用的术语,除非另有说明,一般具有本领域普通技术人员通常理解的含义。
42.下面结合具体实例并参照数据进一步详细描述本实用新型。应理解,这些实施例只是为了举例说明本实用新型,而非以任何方式限制本实用新型的范围。
43.在以下实施例中,未详细描述的各种过程和方法是本领域中公知的常规方法。
44.实施例1
45.如图1和2所示,一种具有神经监测功能的手术机器人,包括主控系统101、机械臂/操纵杆102、末端执行器103和与末端执行器相配的手术器械104、神经功能监测系统201和手术导航系统301,末端执行器103和/或手术器械104上具有神经监测元件105,神经功能监测系统201通过神经监测元件105探测并处理患者手术部位的阻抗信号和/或神经电生理信号,并将信号反馈给主控系统101,手术导航系统301形成影像信号,主控系统101根据手术导航系统的影像信号以及神经功能监测系统的阻抗信号特点和/或神经电生理信号的有无、强弱或者信号特征,控制机械臂/操纵杆102和/或末端执行器103的运动或停止,或者调整机械臂/操纵杆102和/或末端执行器103的运动轨迹。
46.所述主控系统包括计算机中央控制系统,机械驱动主机,手术操作监视器、机器人控制监视器、操作手柄和输入输出等设备。手术时,外科医生可通过主控系统控制操作手柄,手部动作传达到机械臂/操纵杆的尖端,完成手术操作,或者手术机器人根据预设程序或者人工智能系统实现自动化无人操作。
47.所述神经功能监测系统包括对电生理信号(如阻抗)或神经电生理信号的采集、刺激、计算分析、处理的设备或模块(如:阻抗监测仪、神经功能监测仪或者具有相同功能的模块)。神经监测元件能够传出和/或传入信号,通过对阻抗信号的探测区分骨组织、神经组织或其他软组织;或者探测神经因被直接或间接刺激而产生的神经电生理信号,定位神经精确位置。
48.所述手术导航系统包括对图像进行采集、处理的设备或模块,例如内窥镜、超声、x光、ct或mri扫描装置或模块,以及对图像进行处理的软件系统或模块。
49.所述神经监测元件设于手术器械的端部、表面或外缘中的一种或几种,导线埋设于手术器械内部。末端执行器内设有与神经功能监测系统电路连接的导线,末端执行器上设有与神经监测元件的电路连接的接口。优选的,电路连接的接口设于末端执行器与手术器械固定接触处。
50.本实用新型所述的手术机器人可以为适用于各种骨外科手术的机器人,根据手术类型、手术部位以及操作需要的不同,具有相适应的末端执行器以及相配的骨科手术器械。
51.进一步的,所述神经功能监测系统记录并存储记忆术中阻抗信号和/或神经电生理信号形成患者的神经定位信息,主控系统根据神经定位的信息规划、调整机械臂/操纵杆和/或末端执行器的运动轨迹。
52.本实用新型所述神经监测元件选自电极、传感器、传感性能的外包膜、传感性能贴片或涂层、具有传导神经信号的介质制成的传导通路中的一种或几种,所述介质包括但不限于金属、光、声、石墨烯、新介质材料等以上一种或几种中的一种或几种。
53.所述骨外科手术器械选自导引管、导丝、线状骨锉中的一种或几种,所述导引管、导丝的头端、线状骨锉的表面设有至少一个神经监测元件。
54.实施例2
55.本实施例在实施例1的基础上,手术器械104为线性骨锉。所述线状骨锉为扁平带状,具有工作部1042和牵拉部1041,工作部表面具有锉磨纹路,如磨砂颗粒状、齿状、斜纹状纹路等,背面(与非手术部位组织接触面)光滑。工作部表面上设有至少一个神经监测元件105。所述牵拉部具有与手术机器人的末端执行器固定的固定孔或固定件1046,神经监测元件105的导线可经固定孔或固定件1046与手术机器人末端执行器103的电路接口连接,使用时,线状骨锉的工作部表面贴合骨骼,牵拉部受手术操作者或手术机器人牵拉,光滑的背面能够保证锉磨骨骼(如椎板)时,避免误伤神经或其他组织。与神经监测元件连接的导线埋设于骨锉内部,使用时与具有阻抗监测和/或神经功能监测系统的手术机器人连接。所述神经监测元件101能够传出和/或传入信号,通过对阻抗信号的探测区分骨组织、神经组织或其他软组织;或者探测神经因被直接或间接刺激而产生的神经电生理信号,定位神经精确位置。当骨锉工作面探测到神经组织的阻抗信号或神经电生理信号时,神经监测元件105能够将探测到的信号传输至手术机器人的主控系统101,主控系统101控制机械臂/操纵杆和/或末端执行器停止锉磨。
56.优选的,本实用新型所述的骨锉具有柔性,一个优选的方案,所述工作部包括锉磨区1043和边框1044,边框1044与锉磨区1043外缘固定,所述锉磨区1043为两个或两个以上锉片1045纵向(沿骨锉延伸方向)排列或纵向及横向柔性连接形成的节链状条带,每个锉片的工作面具有锉磨纹路,背面光滑,牵拉部1041设于工作部1042两端,与边框1044固连。
57.采用两个或两个以上锉片纵向排列时,锉片与边框固定即可,锉片之间无连接也可以交联。采用多个锉片纵向及横向交联时,锉磨区外缘的锉片与边框固定,内部的锉片柔性连接,锉片之间可以相对于连接处发生转动形成角度,锉片之间可以采用常用的柔性连接方式,例如铰接、万向连接等。
58.每个锉片的工作表面具有锉磨纹路,背面光滑。该设计能够使骨锉具有更好的柔性,紧密贴合骨骼(如椎板)表面,提高锉磨的效率和效果。
59.优选的,所述锉片相互连接形成镂空的网状条带,或者锉片相互连接或与边框固定形成栅状条带。该设计不仅能增加骨锉的柔性,同时还能够方便冲洗锉磨过程中产生的骨屑及软组织杂质颗粒。
60.实施例3
61.如图4所示,本实施例在实施例2的基础上,增加了手术器械导引管106和导丝107,所述导引管、导丝的头端,线状骨锉的表面设有至少一个神经监测元件105。
62.以椎管减压手术为例,结合导引管106、导丝107和线状骨锉104对本实用新型所述手术机器人的使用过程进行说明。具体步骤为:
63.(1)利用导引管106头端穿入椎间孔,并利用导引管106的硬度松解黄韧带与锥板的缝隙;
64.(2)将导丝107与线状骨锉104固定,导丝107一端沿导引管106内穿入,骨锉104随导丝104通过黄韧带、经关节突、穿椎间孔,弯曲穿过锥板;
65.(3)线状骨锉104到达手术部位后,解除与导丝107的连接,导引管先行退出,导丝再退出锥板缝隙。导引管、导丝、线状骨锉上的神经监测元件105在执行上述操作过程中进行实时监测;
66.(4)线状骨锉的固定孔或固定件1046与外科手术机器人的末端执行器103固定,同时神经监测元件也与手术机器人的神经功能监测系统电路连接。使用手术机器人利用骨锉进行磨骨时,神经监测元件实时监测骨锉触及组织的阻抗和/或神经电生理信号,阻抗信号显示为非神经组织或无神经电生理信号时,机械臂带动骨锉工作,椎间孔扩大,达到减压目的,一旦探测到信号,机械臂立即停止工作,避免神经损伤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1