一种柔性关节万向调节机构及调节手柄的制作方法
1.本实用新型涉及医疗器械技术领域,具体涉及一种柔性关节万向调节机构及调节手柄。
背景技术:
2.微创手术由于开口小、创伤小、恢复快而得到了广泛的推广,在现阶段各个科室的手术中广泛应用。
3.微创手术工具电子软镜等需使用柔性关节,那么在手术中如何恰当且合理的调节柔性关节成为亟待解决的问题,现有技术中柔性关节的调节装置有很多,但现有技术中结构设计不合理,不便于调节且无法与电子软镜的其他结构如手术钳配合使用,与手术钳的配合会影响手术钳的其余部件的运行,影响使用,亟需提供一种柔性关节万向调节机构。
4.由于微创手术中开口小,开孔的角度、位置会发生变化,手术钳在人体内的运动范围小,往往需要医生配合手术钳运动的角度,这就导致医生的手长时间处于某种扭曲的角度,医生的手容易麻木,会影响手术安全和医生的健康,亟需提供一种设计合理的调节手柄。
技术实现要素:
5.有鉴于此,有必要针对现有技术中存在的问题,提供一种柔性关节万向调节机构及调节手柄。
6.本实用新型的一种柔性关节万向调节机构,包括摇杆、球关节、卡扣和固定件;
7.所述摇杆包括球形体让位腔和与球形体让位腔固定连接的调节杆;所述球形体让位腔内壁的径向上对称设有圆柱限位凸台;
8.所述球关节包括连接盘和与连接盘固定连接的球形体,球形体的周向上设有与圆柱限位凸台相适配的限位凹槽;
9.所述球关节设于球形体让位腔内,并且通过圆柱限位凸台和限位凹槽的相互配合形成限位;
10.所述卡扣包括底圈、设于底圈上的卡扣定位槽和设于卡扣定位槽底部的卡扣定位孔;所述卡扣与球形体让位腔固定连接;
11.所述连接盘与固定件固定连接;所述固定件包括盖体结构和与盖体结构固定连接且连通的限位管;盖体结构上设有驱动线孔;
12.所述限位管的端部延伸有定位板,所述定位板的端部设有定位板限位孔;
13.在外力的作用下,摇杆沿限位凹槽做旋转往复运动,此时圆柱限位凸台沿限位凹槽做滑移往复运动;
14.或摇杆沿垂直于圆柱限位凸台中心轴的方向做旋转往复运动,此时圆柱限位凸台在限位凹槽做自转往复运动。
15.作为本实用新型柔性关节万向调节机构的进一步改进,所述限位凹槽设有两条,
两条限位凹槽为球形体同一外周线上的限位凹槽。
16.作为本实用新型柔性关节万向调节机构的进一步改进,所述球形体让位腔内壁上设有卡接槽,所述卡扣的底圈上设有卡接结构,所述卡接槽与卡接结构相适配,所述卡扣与球形体让位腔通过卡接槽、卡接结构形成可拆卸的固定连接。
17.作为本实用新型柔性关节万向调节机构的进一步改进,所述卡接槽与卡接结构的形状为l型。
18.作为本实用新型柔性关节万向调节机构的进一步改进,所述摇杆与卡扣对应设有销钉孔,所述摇杆与卡扣通过销钉形成固定连接。
19.作为本实用新型柔性关节万向调节机构的进一步改进,卡扣定位槽或卡扣定位孔均匀的设于底圈上。
20.作为本实用新型柔性关节万向调节机构的进一步改进,卡扣定位槽、卡扣定位孔或驱动线孔设有至少三个。
21.作为本实用新型柔性关节万向调节机构的进一步改进,卡扣与摇杆通过销钉形成固定连接。
22.本实用新型还提供了一种包含有上述的柔性关节万向调节机构的调节手柄,包括手柄壳体和设于手柄壳体上的旋转件;
23.所述手柄壳体内设有让位腔,所述柔性关节万向调节机构与让位腔相适配,所述让位腔对应柔性关节万向调节机构设有二级让位孔,所述球形体让位腔设于手柄壳体内,调节杆穿过二级让位孔设置,所述让位腔对应旋转件设有三级让位孔;
24.所述旋转件为管状结构,所述旋转件限位于三级让位孔中,所述旋转件在外力的作用下相对于手柄壳体旋转;
25.所述限位管的端部与旋转件的一端部固定连接。
26.作为本实用新型调节手柄的进一步改进,还包括设于让位腔内的轴线运动机构,所述让位腔对应轴线运动机构设有一级让位孔;
27.所述轴线运动机构包括芯棒运动圈、运动圈连接件、芯棒和曲柄滑块机构;
28.所述芯棒运动圈包括外圈、固定设于外圈上且沿外圈的直径设置的支撑杆和设于支撑杆端部的限位卡圈,限位卡圈与外圈同心设置,所述限位卡圈内侧表面设有一级转动凹槽;
29.所述运动圈连接件为弧形片状结构,所述弧形片状结构的上侧表面设有弧形限位凹槽;所述弧形片状结构的下侧表面设有一级限位凸起;所述让位腔的底部对应一级限位凸起设置有一级限位凹槽,所述运动圈连接件通过一级限位凸起和一级限位凹槽的配合限位在让位腔内,在外力的作用下,运动圈连接件沿一级限位凹槽做往复运动;
30.所述芯棒运动圈的外圈卡设于运动圈连接件上的弧形限位凹槽内,在外力的作用下芯棒运动圈沿弧形限位凹槽做往复运动;
31.所述芯棒上设有一级限位凸起圈,所述一级限位凸起圈与一级转动凹槽相适配,所述芯棒穿过限位卡圈并通过一级限位凸起圈限位于芯棒运动圈的限位卡圈内,在外力的作用下,所述芯棒沿限位卡圈做旋转往复运动,或随芯棒运动圈沿芯棒的轴线方向做整体往复运动;
32.所述芯棒一端穿过固定件、旋转件限位设置,所述芯棒在外力的作用下相对于固
定件、旋转件进行往复移动或旋转;
33.曲柄滑块机构包括手指握持部、与手指握持部铰接连接的传动杆和与传动杆铰接连接的滑块,所述曲柄滑块机构的一端部穿过一级让位孔且通过销钉铰接在让位腔内,所述滑块与运动圈连接件固定连接;
34.盖体结构上设有让位开口;所述让位开口与支撑杆相适配;
35.所述限位卡圈设于盖体结构内,所述外圈设于盖体结构外,所述支撑杆穿过让位开口连接限位卡圈和外圈。
36.所述轴线运动机构的运动过程包括:外力带动曲柄滑块机构运动,曲柄滑块机构带动运动圈连接件沿让位腔内的一级限位凹槽做往复运动,运动圈连接件带动芯棒运动圈沿一级限位凹槽的方向做往复运动,芯棒运动圈上的一级转动凹槽和芯棒上的一级限位凸起圈卡在一起,芯棒运动圈带动芯棒一起沿一级限位凹槽的方向做往复运动,从而带动手术钳头的进行开合运动,同时芯棒运动圈的支撑杆在让位开口内做往复运动。
37.作为本实用新型调节手柄的进一步改进,还包括设于让位腔内的旋转运动机构,所述旋转运动机构包括齿圈、与齿圈的内齿圈相互啮合的齿圈配合齿轮、齿轮连接棒、连接齿轮、与连接齿轮的外齿圈相互啮合的啮合齿轮、与啮合齿轮的外齿圈相互啮合的固定齿轮、芯棒和芯棒卡槽;
38.所述齿圈固定连接在让位腔内;所述限位管的端部穿过齿圈与旋转件的一端部固定连接;
39.盖体结构对应齿轮连接棒设置有连接棒让位孔,
40.所述齿轮连接棒穿过连接棒让位孔设置,所述齿轮连接棒与齿圈配合齿轮固定连接并铰接于定位板上,另一端与齿轮固定连接并铰接于连接盘上;
41.所述连接齿轮、啮合齿轮通过销钉铰接限位于连接盘上;
42.所述固定齿轮与连接盘同心铰接;
43.所述芯棒一端穿过固定件、旋转件限位设置,另一端设有t形限位台;所述芯棒在外力的作用下,相对于固定件、旋转件进行往复移动或旋转;芯棒卡槽的一端设有限位凹槽,另一端固定连接在固定齿轮的前端面上;
44.所述t形限位台与芯棒卡槽的限位凹槽相适配,所述芯棒通过t形限位台与芯棒卡槽限位卡接,在外力的作用下,芯棒沿芯棒卡槽的让位槽做往复运动,或与芯棒卡槽一起旋转运动;
45.所述旋转运动机构的运动过程包括:在外力的作用下控制手柄壳体整体发生绕轴线的旋转运动时,固定在手柄壳体上的齿圈跟着旋转,带动与之啮合的齿圈配合齿轮旋转,齿圈配合齿轮带动与之固定连接的齿轮连接棒和连接齿轮一起旋转,连接齿轮带动与之啮合的啮合齿轮旋转,啮合齿轮带动与之啮合的固定齿轮旋转,固定齿轮带动与之固定连接的芯棒卡槽旋转,芯棒卡槽带动芯棒旋转,从而带动与芯棒固定连接的手术钳头旋转;定位板限位孔通过销钉与齿轮连接棒相适配;旋转运动机构的旋转运动中,关节外管、旋转件、摇杆、球关节、卡扣、固定件,在手柄壳体旋转时相对于手柄壳体旋转前的初始位置固定不动,达到在手柄壳体旋转时控制柔性关节运动的零件不发生运动、从而保证柔性关节运动的方向不会跟着手柄壳体的运动而改变的目的;即整体运动为当手握手柄时,保持外管不动,可以旋转整个手柄以及手术钳头,保持钳头和手柄的相对位置始终不变,而外管和柔性
关节,及后方的球关节,摇杆始终位置没有变化。
46.作为本实用新型调节手柄的进一步改进,还包括齿轮盖圈设于连接盘与固定件之间,所述齿轮盖圈分别与连接盘、固定件固定连接;旋转运动机构的旋转运动中,关节外管、旋转件、摇杆、球关节、卡扣、齿轮盖圈、固定件在手柄壳体旋转时相对于手柄壳体旋转前的初始位置固定不动,达到在手柄壳体旋转时控制柔性关节运动的零件不发生运动、从而保证柔性关节运动的方向不会跟着手柄壳体的运动而改变的目的;即整体运动为当手握手柄时,保持外管不动,可以旋转整个手柄以及手术钳头,保持钳头和手柄的相对位置始终不变,而外管和柔性关节,及后方的球关节,摇杆始终位置没有变化。
47.作为本实用新型调节手柄的进一步改进,所述滑块与运动圈连接件通过焊接或者铆接或者螺栓连接方式固定连接;或者滑块与运动圈连接件为一体成型结构。
48.作为本实用新型调节手柄的进一步改进,齿轮盖圈用以遮挡住连接齿轮、啮合齿轮和固定齿轮。
49.作为本实用新型调节手柄的进一步改进,还包括设于让位腔内的轴线运动机构和旋转运动机构,所述让位腔对应轴线运动机构设有一级让位孔;
50.所述轴线运动机构包括芯棒运动圈、运动圈连接件、芯棒和曲柄滑块机构;
51.所述芯棒运动圈包括外圈、固定设于外圈上且沿外圈的直径设置的支撑杆和设于支撑杆端部的限位卡圈,限位卡圈与外圈同心设置,所述限位卡圈内侧表面设有一级转动凹槽;
52.所述运动圈连接件为弧形片状结构,所述弧形片状结构的上侧表面设有弧形限位凹槽;所述弧形片状结构的下侧表面设有一级限位凸起;所述让位腔的底部对应一级限位凸起设置有一级限位凹槽,所述运动圈连接件通过一级限位凸起和一级限位凹槽的配合限位在让位腔内,在外力的作用下,运动圈连接件沿一级限位凹槽做往复运动;
53.所述芯棒运动圈的外圈卡设于运动圈连接件上的弧形限位凹槽内,在外力的作用下芯棒运动圈沿弧形限位凹槽做往复运动;
54.所述芯棒上设有一级限位凸起圈,所述一级限位凸起圈与一级转动凹槽相适配,所述芯棒穿过限位卡圈并通过一级限位凸起圈限位于芯棒运动圈的限位卡圈内,在外力的作用下,所述芯棒沿限位卡圈做旋转往复运动,或随芯棒运动圈沿芯棒的轴线方向做整体往复运动;
55.曲柄滑块机构包括手指握持部、与手指握持部铰接连接的传动杆和与传动杆铰接连接的滑块,所述曲柄滑块机构的一端部穿过一级让位孔且通过销钉铰接在让位腔内,所述滑块与运动圈连接件固定连接;
56.盖体结构上设有让位开口;所述让位开口与支撑杆相适配;
57.所述限位卡圈设于盖体结构内,所述外圈设于盖体结构外,所述支撑杆穿过让位开口连接限位卡圈和外圈;
58.所述轴线运动机构的运动过程包括:外力带动曲柄滑块机构运动,曲柄滑块机构带动运动圈连接件沿让位腔内的一级限位凹槽做往复运动,运动圈连接件带动芯棒运动圈沿一级限位凹槽的方向做往复运动,芯棒运动圈上的一级转动凹槽和芯棒上的一级限位凸起圈卡在一起,芯棒运动圈带动芯棒一起沿一级限位凹槽的方向做往复运动,从而带动手术钳头的进行开合运动,同时芯棒运动圈的支撑杆在让位开口内做往复运动;
59.所述旋转运动机构包括齿圈、与齿圈的内齿圈相互啮合的齿圈配合齿轮、齿轮连接棒、连接齿轮、与连接齿轮的外齿圈相互啮合的啮合齿轮、与啮合齿轮的外齿圈相互啮合固定齿轮、芯棒和芯棒卡槽;
60.所述齿圈固定连接在让位腔内;所述限位管的端部穿过齿圈与旋转件的一端部固定连接;
61.盖体结构对应齿轮连接棒设置有连接棒让位孔,
62.所述齿轮连接棒穿过连接棒让位孔设置,所述齿轮连接棒与齿圈配合齿轮固定连接并铰接于定位板上,另一端与齿轮固定连接并铰接于连接盘上;
63.所述连接齿轮、啮合齿轮通过销钉铰接限位于连接盘上;
64.所述固定齿轮与连接盘同心铰接;
65.所述芯棒一端穿过固定件、旋转件限位设置,另一端设有t形限位台;所述芯棒在外力的作用下,相对于固定件、旋转件进行往复运动或旋转;芯棒卡槽的一端设有限位凹槽,另一端固定连接在固定齿轮的前端面上;
66.所述t形限位台与芯棒卡槽的限位凹槽相适配,所述芯棒通过t形限位台与芯棒卡槽限位卡接,在外力的作用下,芯棒沿芯棒卡槽的让位槽做往复运动,或与芯棒卡槽一起旋转运动;
67.所述旋转运动机构的运动过程包括:在外力的作用下控制手柄壳体整体发生绕轴线的旋转运动时,固定在手柄壳体上的齿圈跟着旋转,带动与之啮合的齿圈配合齿轮旋转,齿圈配合齿轮带动与之固定连接的齿轮连接棒和连接齿轮一起旋转,连接齿轮带动与之啮合的啮合齿轮旋转,啮合齿轮带动与之啮合的固定齿轮旋转,固定齿轮带动与之固定连接的芯棒卡槽旋转,芯棒卡槽带动芯棒旋转,从而带动与芯棒固定连接的手术钳头旋转;定位板限位孔通过销钉与齿轮连接棒相适配。
68.作为本实用新型调节手柄的进一步改进,所述旋转件的中段设有旋转件凸起,所述三级让位孔内设有三级限位凸起圈,所述旋转件凸起和三级限位凸起圈贴合设置,所述三级限位凸起圈两侧设有一级轴承,所述旋转件通过一级轴承限位于三级让位孔内,所述旋转件在外力的作用下,相对于手柄壳体旋转。
69.作为本实用新型调节手柄的进一步改进,一级轴承的内圈和旋转件可拆卸固定连接,一级轴承的外圈和手柄壳体可拆卸固定连接。
70.作为本实用新型调节手柄的进一步改进,所述芯棒卡槽外设有二级轴承,齿轮盖圈上设有轴心孔,所述二级轴承的外圈与齿轮盖圈的轴心孔形成固定连接;二级轴承的内圈与芯棒卡槽的外侧表面形成固定连接。
71.作为本实用新型调节手柄的进一步改进,所述二级轴承的外圈与齿轮盖圈的轴心孔形成可拆卸的固定连接;二级轴承的内圈与芯棒卡槽的外侧表面形成可拆卸的固定连接。
72.轴心孔与二级轴承、芯棒分别相适配;轴心孔与二级轴承的轴心孔内径大于芯棒的外径。
73.在外力的作用下控制手柄壳体整体发生绕轴线的旋转运动时,固定在手柄壳体上的齿圈跟着旋转,带动与之啮合的齿圈配合齿轮旋转,齿圈配合齿轮带动与之固定连接的齿轮连接棒和连接齿轮一起旋转,连接齿轮带动与之啮合的啮合齿轮旋转,啮合齿轮带动
与之啮合的固定齿轮旋转,固定齿轮带动与之固定连接的芯棒卡槽旋转,芯棒卡槽带动芯棒旋转,从而带动与芯棒固定连接的手术钳头旋转;定位板限位孔通过销钉与齿轮连接棒相适配。
74.芯棒卡槽带动芯棒旋转的同时,芯棒卡槽带动二级轴承的内圈一起旋转,二级轴承的外圈固定连接在齿轮盖圈上不动,二级轴承起到一个运动顺滑的目的,固定齿轮的端面是用于限制轴承的轴向运动,不是连接固定的部件;
75.即二级轴承的内圈和齿轮盖圈发生相对旋转,所述轴心孔的外圈设有限位台阶圈,限位台阶圈、或固定齿轮的端面用以限制二级轴承的轴向运动。
76.作为本实用新型调节手柄的进一步改进,所述弧形片状结构两端部的上侧表面设有限位凸起,所述弧形限位凹槽设于限位凸起上。
77.作为本实用新型调节手柄的进一步改进,所述齿圈与齿圈配合齿轮的传动比为3:1;所述啮合齿轮与固定齿轮的传动比为1:3;啮合齿轮与连接齿轮的传动比为1:1;所以目前齿圈的齿数为51齿,齿圈配合齿轮的齿数为17齿,连接齿轮和啮合齿轮的齿数均为15齿,固定齿轮的齿数为45齿;通过设计齿轮的传动比,使得手柄壳体旋转的角度和钳头旋转的角度始终保持一致,同步转动;
78.由于考虑到安装位置,总体传动比为1:1,前部分为3:1,后部分为1:3,当然就是总体达到1:1,同步旋转的都可以,这里综合考虑了齿轮的大小、装配的位置以及齿轮啮合的正反转等情况。
79.作为本实用新型调节手柄的进一步改进,固定件前端固定连接旋转件,旋转件处于芯棒的轴线上,且与芯棒同轴心,旋转件内固定连接外管,固定件后方固定连接齿轮盖圈,齿轮盖圈固定连接球关节的底座,球关节和摇杆铰接,摇杆底面和卡扣固定连接,再通过驱动线使得摇杆不会随意运动。
80.本实用新型在实施时,芯棒一端穿过固定件、旋转件、关节外管、柔性关节后连接有手术钳头;
81.芯棒和手术钳头相互之间固定连接或通过销钉形成铰接,两者之间的连接关系能够使得芯棒前后运动,带动手术钳头的开合;且芯棒旋转运动时带动手术钳头的旋转。
82.关节外管的一端与旋转件的管状结构的内腔固定连接,关节外管另一端与柔性关节固定连接;柔性关节位于关节外管前方,柔性关节位于手术钳头后方并与其铰接,即柔性关节可以和手术钳头发生相对转动。
83.关节外管还可一端穿过旋转件的管状结构,设于旋转件的管状结构内的部分与旋转件的管状结构的内腔固定连接;关节外管另一端与柔性关节固定连接;柔性关节位于关节外管前方,柔性关节位于手术钳头后方并与其铰接,即柔性关节可以和手术钳头发生相对转动;在上述情况下,关节外管的端部处于手柄壳体内的固定件后端面至齿圈的范围内,不会与芯棒发生碰撞,保证使用。
84.芯棒在外力的作用下,可以相对于固定件、旋转件、关节外管、柔性关节进行往复移动或旋转;
85.柔性关节的驱动线依次通过外管的内腔和芯棒的外表面形成的空隙、限位管的内腔与芯棒的外表面形成的空隙、固定件的盖体结构上的驱动线孔、盖体结构的外表面、齿轮盖圈的外表面、卡扣上的定位孔并固定在卡扣上的卡扣定位孔上。摇杆通过配合可以进行
万向运动,带动驱动线运动,达到控制柔性关节的弯曲的目的。
86.作为本实用新型调节手柄的进一步改进,所述柔性关节的驱动线设有至少三条;
87.作为本实用新型调节手柄的进一步改进,所述柔性关节的驱动线设有四条;所述驱动线穿过卡扣定位孔限位在卡扣定位槽内,限位为驱动线穿过卡扣定位孔在卡扣定位槽内打结形成固定连接,所述卡扣定位槽内设有粘接胶层,所述粘接胶层用于稳固连接。驱动线的材质为合金丝, 限位凹槽和圆柱限位凸台的作用是限制球关节的一个自由度,即防止球关节自转,球关节自身带着x、y和自旋转三个自由度,限制掉自旋转的自由度才能使用,摇杆在x方向沿着凹槽做往复运动,在y方向还可以做往复运动因为是圆柱限位凸台的形状设置,摇杆还可以在限位凹槽中旋转的,这就达到了两个方向的运动,组和起来就是万向运动。
88.作为本实用新型调节手柄的进一步改进,芯棒前端连接手术钳头的尾端,手术钳头类似与剪刀的结构,芯棒沿一级限位凹槽的方向做往复运动时带动钳头的开合,同时芯棒运动圈的支撑杆在让位开口内做往复运动。
89.本实用新型与现有技术相比,具有以下有益效果。
90.本实用新型的柔性关节万向调节机构,具有结构设计合理可靠、便于调节、能够与电子软镜的其他结构如手术钳配合使用且不影响手术钳的其余部件的运行的优点。本实用新型的柔性关节万向调节机构与柔性关节配合,能够迅速且稳定的调节柔性关节的弯曲角度。
91.本实用新型的通过将柔性关节万向调节机构适配的设于调节手柄内,使得调节手柄内包含调节柔性关节达到万向运动的目的。
92.本实用新型通过设置轴线运动机构达到能够调节芯棒进行轴线往复运动;其不影响柔性关节的万向调节;也不影响旋转运动机构调节;
93.本实用新型通过设置旋转运动机构,达到在手柄壳体旋转时控制柔性关节运动的零件不发生运动、从而保证柔性关节运动的方向不会跟着手柄壳体的运动而改变的目的;即整体运动为当手握手柄时,保持与调节手柄连接的关节外管不动,可以旋转整个手柄以及芯棒连接的手术钳头,保持手术钳头和手柄的相对位置始终不变,而关节外管、柔性关节、球关节、摇杆始终位置没有变化。
94.本实用新型的调节手柄结构设计合理,将芯棒的轴线往复运动、调节手柄的自身转动和柔性关节万向转动分离开,达到使柔性关节运动方向始终唯一的目的。能够满足医生的使用。
附图说明
95.图1为本实用新型柔性关节万向调节机构的结构示意图。
96.图2为图1的剖面视图。
97.图3为摇杆的结构示意图。
98.图4为球关节的结构示意图。
99.图5为卡扣的结构示意图。
100.图6为固定件的结构示意图。
101.图7为本实用新型的调节手柄的手柄壳体腔体中仅包含轴线运动机构的剖面结构
示意图。
102.图8为本实用新型的调节手柄的手柄壳体腔体中仅包含旋转运动机构的剖面结构示意图。
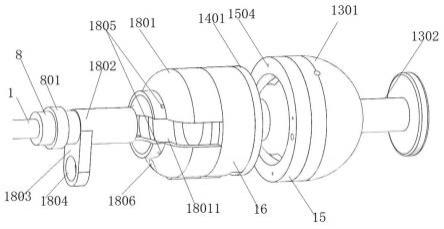
103.图9为本实用新型的调节手柄的一种剖面结构示意图。
104.图10为图9不包含一级轴承的结构示意图。
105.图11为图10另一角度的结构示意图。
106.图12为本实用新型的调节手柄的一种去除掉固定件的剖面结构示意图。
107.图13为芯棒的结构示意图。
108.图14为图10的局部放大图。
109.图15为图8的局部放大图。
110.图16为固定齿轮、齿轮盖圈、芯棒卡槽、二级轴承的位置关系剖面视图。
111.图17为图16的另一方向结构示意图。
112.图18为齿轮盖圈结构示意图。
113.图中:1-关节外管,2-齿圈,3-芯棒运动圈,301-外圈,302-支撑杆,303-限位卡圈,4-运动圈连接件,401-一级限位凸起,5-齿圈配合齿轮,6-齿轮连接棒,7-连接齿轮,8-旋转件,801-旋转件凸起,9-啮合齿轮,10-固定齿轮,11-芯棒,1101-一级限位凸起圈,1102-t形限位台,12-手柄壳体,1201-一级让位孔,1202-二级让位孔,1203-三级让位孔,12031-三级限位凸起圈,13-摇杆,1301-球形体让位腔,1302-调节杆,1303-圆柱限位凸台,1304-卡接槽,14-球关节,1401-连接盘,1402-球形体,1403-限位凹槽,15-卡扣,1501-底圈,1502-卡接结构,1503-卡扣定位槽,1504-卡扣定位孔,16-齿轮盖圈,1601-轴心孔,16011-限位台阶圈,17-芯棒卡槽,18-固定件,1801-盖体结构,18011-让位开口,1802-限位管,1803-定位板,1804-定位板限位孔,1805-驱动线孔,1806-连接棒让位孔,19-曲柄滑块机构,1901-手指握持部,1902-传动杆,1903-滑块,20-一级轴承,21-二级轴承。
具体实施方式
114.下面结合附图和实施例对本实用新型做进一步的解释说明。
115.实施例1
116.本实用新型的一种柔性关节万向调节机构,包括摇杆13、球关节14、卡扣15和固定件18;
117.摇杆13包括球形体让位腔1301和与球形体让位腔1301固定连接的调节杆1302;球形体让位腔1301内壁的径向上对称设有圆柱限位凸台1303;
118.球关节14包括连接盘1401和与连接盘1401固定连接的球形体1402,球形体1402的周向上设有与圆柱限位凸台1303相适配的限位凹槽1403;
119.球关节14设于球形体让位腔1301内,并且通过圆柱限位凸台1303和限位凹槽1403的相互配合形成限位;
120.卡扣15包括底圈1501、设于底圈1501上的卡扣定位槽1503和设于卡扣定位槽1503底部的卡扣定位孔1504;卡扣15与球形体让位腔1301固定连接;
121.连接盘1401与固定件18固定连接;固定件18包括盖体结构1801和与盖体结构1801固定连接且连通的限位管1802;盖体结构1801上设有驱动线孔1805和与限位管1802连通的
连通通孔;
122.限位管1802的端部延伸有定位板1803,定位板的端部设有定位板限位孔1804;
123.在外力的作用下,摇杆13沿限位凹槽1403做旋转往复运动,此时圆柱限位凸台1303沿限位凹槽1403做滑移往复运动;
124.或摇杆13沿垂直于圆柱限位凸台1303中心轴的方向做旋转往复运动,此时圆柱限位凸台1303在限位凹槽1403做自转往复运动。
125.实施例2
126.其余与实施例1的方案一致,限位凹槽1403设有两条,两条限位凹槽1403为球形体1402同一外周线上的限位凹槽;
127.实施例3
128.其余与实施例1或2的方案一致,球形体让位腔1301内壁上设有卡接槽1304,卡扣15的底圈1501上设有卡接结构1502,卡接槽1304与卡接结构1502相适配,卡扣15与球形体让位腔1301通过卡接槽1304、卡接结构1502形成可拆卸的固定连接。
129.实施例4
130.其余与实施例1-3的任一方案一致,卡接槽1304与卡接结构1502的形状为l型。
131.实施例5
132.其余与实施例1-4的任一方案一致,摇杆13与卡扣15对应设有销钉孔,摇杆13与卡扣15通过销钉形成固定连接。
133.实施例6
134.其余与实施例1-5的任一方案一致,卡扣定位槽1503或卡扣定位孔1504均匀的设于底圈1501上。
135.实施例7
136.其余与实施例1-6的任一方案一致,卡扣定位槽1503、卡扣定位孔1504或驱动线孔1805设有至少三个。
137.实施例8
138.其余与实施例1-7的任一方案一致,卡扣15与摇杆13通过销钉形成固定连接。
139.实施例9
140.本实用新型还提供了一种包含有与实施例1-8的任一方案一致的柔性关节万向调节机构的调节手柄,包括手柄壳体12和设于手柄壳体12上的旋转件8;
141.手柄壳体12内设有让位腔,柔性关节万向调节机构与让位腔相适配,让位腔对应柔性关节万向调节机构设有二级让位孔1202,球形体让位腔1301设于手柄壳体12内,调节杆1302穿过二级让位孔1202设置,让位腔对应旋转件8设有三级让位孔1203;
142.旋转件8为管状结构,旋转件8限位于三级让位孔1203中,旋转件8在外力的作用下,可相对于手柄壳体12旋转;
143.限位管1802的端部与旋转件8的一端部固定连接。
144.实施例10
145.其余与实施例9的方案一致,还包括设于让位腔内的轴线运动机构,让位腔对应轴线运动机构设有一级让位孔1201;
146.轴线运动机构包括芯棒运动圈3、运动圈连接件4、芯棒11和曲柄滑块机构19;
147.芯棒运动圈3包括外圈301、固定设于外圈301上且沿外圈301的直径设置的支撑杆302和设于支撑杆302端部的限位卡圈303,限位卡圈303与外圈301同心设置,限位卡圈303内侧表面设有一级转动凹槽;
148.运动圈连接件4为弧形片状结构,弧形片状结构的上侧表面设有弧形限位凹槽;弧形片状结构的下侧表面设有一级限位凸起401;让位腔的底部对应一级限位凸起401设置有一级限位凹槽,运动圈连接件4通过一级限位凸起401和一级限位凹槽的配合限位在让位腔内,在外力的作用下,运动圈连接件4可沿一级限位凹槽做往复运动;
149.芯棒运动圈3的外圈301卡设于运动圈连接件4上的弧形限位凹槽内,在外力的作用下芯棒运动圈3可沿弧形限位凹槽做往复运动;
150.芯棒11上设有一级限位凸起圈1101,一级限位凸起圈1101与一级转动凹槽相适配,芯棒11穿过限位卡圈303并通过一级限位凸起圈限位于芯棒运动圈3的限位卡圈303内,在外力的作用下,芯棒11沿限位卡圈303做旋转往复运动,或随芯棒运动圈3沿芯棒11的轴线方向做整体往复运动;
151.芯棒11一端穿过固定件18、旋转件8限位设置,芯棒11在外力的作用下,可以相对于固定件18、旋转件8进行往复移动或旋转;
152.曲柄滑块机构19包括手指握持部1901、与手指握持部1901铰接连接的传动杆1902和与传动杆1902铰接连接的滑块1903,曲柄滑块机构19的一端部穿过一级让位孔1201且通过销钉铰接在让位腔内,滑块与运动圈连接件4固定连接;
153.盖体结构1801上设有让位开口18011;让位开口18011与支撑杆302相适配;
154.限位卡圈303设于盖体结构1801内,外圈301设于盖体结构1801外,支撑杆302穿过让位开口18011连接限位卡圈303和外圈301。
155.轴线运动机构的运动过程包括:外力带动曲柄滑块机构19运动,曲柄滑块机构19带动运动圈连接件4沿让位腔内的一级限位凹槽做往复运动,运动圈连接件4带动芯棒运动圈3沿一级限位凹槽的方向做往复运动,芯棒运动圈3上的一级转动凹槽和芯棒11上的一级限位凸起圈1101卡在一起,芯棒运动圈3带动芯棒11一起沿一级限位凹槽的方向做往复运动,从而带动手术钳头的进行开合运动,同时芯棒运动圈3的支撑杆302在让位开口18011内做往复运动。
156.实施例11
157.其余与实施例9或10的方案一致,还包括设于让位腔内的旋转运动机构,旋转运动机构包括齿圈2、与齿圈2的内齿圈相互啮合的齿圈配合齿轮5、齿轮连接棒6、连接齿轮7、与连接齿轮7的外齿圈相互啮合的啮合齿轮9、与啮合齿轮9的外齿圈相互啮合的固定齿轮10、芯棒11和芯棒卡槽17;
158.齿圈2固定连接在让位腔内;限位管1802的端部穿过齿圈2与旋转件8的一端部固定连接;
159.盖体结构1801对应齿轮连接棒6设置有连接棒让位孔1806,
160.齿轮连接棒6穿过连接棒让位孔1806设置,齿轮连接棒6与齿圈配合齿轮5固定连接并铰接于定位板1803上,另一端与齿轮7固定连接并铰接于连接盘1401上;
161.连接齿轮7、啮合齿轮9通过销钉铰接限位于连接盘1401上;
162.固定齿轮10与连接盘1401同心铰接;
163.芯棒11一端穿过固定件18、旋转件8限位设置,另一端设有t形限位台1102;芯棒11在外力的作用下,可以相对于固定件18、旋转件8进行往复移动或旋转;芯棒卡槽17的一端设有限位凹槽,另一端固定连接在固定齿轮10的前端面上;
164.t形限位台1102与芯棒卡槽17的限位凹槽相适配,芯棒11通过t形限位台1102与芯棒卡槽17限位卡接,在外力的作用下,芯棒11可沿芯棒卡槽17的让位槽做往复运动,也可与芯棒卡槽17一起旋转运动;
165.旋转运动机构的运动过程包括:在外力的作用下控制手柄壳体12整体发生绕轴线的旋转运动时,固定在手柄壳体12上的齿圈2跟着旋转,带动与之啮合的齿圈配合齿轮5旋转,齿圈配合齿轮5带动与之固定连接的齿轮连接棒6和连接齿轮7一起旋转,连接齿轮7带动与之啮合的啮合齿轮9旋转,啮合齿轮9带动与之啮合的固定齿轮10旋转,固定齿轮10带动与之固定连接的芯棒卡槽17旋转,芯棒卡槽17带动芯棒11旋转,从而带动与芯棒固定连接的手术钳头旋转;定位板限位孔1804通过销钉与齿轮连接棒6相适配;
166.旋转运动机构的旋转运动中,关节外管1、旋转件8、摇杆13、球关节14、卡扣15、固定件18,在手柄壳体12旋转时相对于手柄壳体12旋转前的初始位置固定不动,达到在手柄壳体12旋转时控制柔性关节运动的零件不发生运动、从而保证柔性关节运动的方向不会跟着手柄壳体12的运动而改变的目的;即整体运动为当手握手柄时,保持外管1不动,可以旋转整个手柄以及手术钳头,保持钳头和手柄的相对位置始终不变,而外管1和柔性关节,及后方的球关节,摇杆始终位置没有变化。
167.实施例12
168.其余与实施例11的方案一致,还包括齿轮盖圈16设于连接盘1401与固定件18之间,齿轮盖圈16分别与连接盘1401、固定件18固定连接。
169.旋转运动机构的旋转运动中,关节外管1、旋转件8、摇杆13、球关节14、卡扣15、齿轮盖圈16、固定件18,在手柄壳体12旋转时相对于手柄壳体12旋转前的初始位置固定不动,达到在手柄壳体12旋转时控制柔性关节运动的零件不发生运动、从而保证柔性关节运动的方向不会跟着手柄壳体12的运动而改变的目的;即整体运动为当手握手柄时,保持外管1不动,可以旋转整个手柄以及手术钳头,保持钳头和手柄的相对位置始终不变,而外管1和柔性关节,及后方的球关节,摇杆始终位置没有变化。
170.实施例13
171.其余与实施例10或11的方案一致,作为本实用新型调节手柄的进一步改进,齿轮盖圈16用以遮挡住连接齿轮7、啮合齿轮9和固定齿轮10。
172.实施例14
173.其余与实施例9-13的任一方案一致,还包括设于让位腔内的轴线运动机构和旋转运动机构,让位腔对应轴线运动机构设有一级让位孔1201;
174.轴线运动机构包括芯棒运动圈3、运动圈连接件4、芯棒11和曲柄滑块机构19;
175.芯棒运动圈3包括外圈301、固定设于外圈301上且沿外圈301的直径设置的支撑杆302和设于支撑杆302端部的限位卡圈303,限位卡圈303与外圈301同心设置,限位卡圈303内侧表面设有一级转动凹槽;
176.运动圈连接件4为弧形片状结构,弧形片状结构的上侧表面设有弧形限位凹槽;弧形片状结构的下侧表面设有一级限位凸起401;让位腔的底部对应一级限位凸起401设置有
一级限位凹槽,运动圈连接件4通过一级限位凸起401和一级限位凹槽的配合限位在让位腔内,在外力的作用下,运动圈连接件4可沿一级限位凹槽做往复运动;
177.芯棒运动圈3的外圈301卡设于运动圈连接件4上的弧形限位凹槽内,在外力的作用下芯棒运动圈3可沿弧形限位凹槽做往复运动;
178.芯棒11上设有一级限位凸起圈1101,一级限位凸起圈1101与一级转动凹槽相适配,芯棒11穿过限位卡圈303并通过一级限位凸起圈限位于芯棒运动圈3的限位卡圈303内,在外力的作用下,芯棒11沿限位卡圈303做旋转往复运动,或随芯棒运动圈3沿芯棒11的轴线方向做整体往复运动;
179.曲柄滑块机构19包括手指握持部1901、与手指握持部1901铰接连接的传动杆1902和与传动杆1902铰接连接的滑块1903,曲柄滑块机构19的一端部穿过一级让位孔1201且通过销钉铰接在让位腔内,滑块与运动圈连接件4固定连接;
180.盖体结构1801上设有让位开口18011;让位开口18011与支撑杆302相适配;
181.限位卡圈303设于盖体结构1801内,外圈301设于盖体结构1801外,支撑杆302穿过让位开口18011连接限位卡圈303和外圈301;
182.轴线运动机构的运动过程包括:外力带动曲柄滑块机构19运动,曲柄滑块机构19带动运动圈连接件4沿让位腔内的一级限位凹槽做往复运动,运动圈连接件4带动芯棒运动圈3沿一级限位凹槽的方向做往复运动,芯棒运动圈3上的一级转动凹槽和芯棒11上的一级限位凸起圈1101卡在一起,芯棒运动圈3带动芯棒11一起沿一级限位凹槽的方向做往复运动,从而带动手术钳头的进行开合运动,同时芯棒运动圈3的支撑杆302在让位开口18011内做往复运动;
183.旋转运动机构包括齿圈2、与齿圈2的内齿圈相互啮合的齿圈配合齿轮5、齿轮连接棒6、连接齿轮7、与连接齿轮7的外齿圈相互啮合的啮合齿轮9、与啮合齿轮9的外齿圈相互啮合固定齿轮10、芯棒11和芯棒卡槽17;
184.齿圈2固定连接在让位腔内;限位管1802的端部穿过齿圈2与旋转件8的一端部固定连接;
185.盖体结构1801对应齿轮连接棒6设置有连接棒让位孔1806,
186.齿轮连接棒6穿过连接棒让位孔1806设置,齿轮连接棒6与齿圈配合齿轮5固定连接并铰接于定位板1803上,另一端与齿轮7固定连接并铰接于连接盘1401上;
187.连接齿轮7、啮合齿轮9通过销钉铰接限位于连接盘1401上;
188.固定齿轮10与连接盘1401同心铰接;
189.芯棒11一端穿过固定件18、旋转件8限位设置,另一端设有t形限位台1102;芯棒11在外力的作用下,可以相对于固定件18、旋转件8进行往复移动或旋转;芯棒卡槽17的一端设有限位凹槽,另一端固定连接在固定齿轮10的前端面上;
190.t形限位台1102与芯棒卡槽17的限位凹槽相适配,芯棒11通过t形限位台1102与芯棒卡槽17限位卡接,在外力的作用下,芯棒11可沿芯棒卡槽17的让位槽做往复运动,也可与芯棒卡槽17一起旋转运动;
191.旋转运动机构的运动过程包括:在外力的作用下控制手柄壳体12整体发生绕轴线的旋转运动时,固定在手柄壳体12上的齿圈2跟着旋转,带动与之啮合的齿圈配合齿轮5旋转,齿圈配合齿轮5带动与之固定连接的齿轮连接棒6和连接齿轮7一起旋转,连接齿轮7带
动与之啮合的啮合齿轮9旋转,啮合齿轮9带动与之啮合的固定齿轮10旋转,固定齿轮10带动与之固定连接的芯棒卡槽17旋转,芯棒卡槽17带动芯棒11旋转,从而带动与芯棒固定连接的手术钳头旋转;定位板限位孔1804通过销钉与齿轮连接棒6相适配。
192.实施例15
193.其余与实施例9-14的任一方案一致,旋转件8的中段设有旋转件凸起801,三级让位孔1203内设有三级限位凸起圈12031,旋转件凸起801和三级限位凸起圈12031贴合设置,三级限位凸起圈12031两侧设有一级轴承20,旋转件8通过一级轴承20限位于三级让位孔1203内,旋转件8在外力的作用下,可相对于手柄壳体12旋转。
194.实施例16
195.其余与实施例15的方案一致,一级轴承20的内圈和旋转件8可拆卸固定连接,一级轴承20的外圈和手柄壳体12可拆卸固定连接。
196.实施例17
197.其余与实施例1-16的任一方案一致,芯棒卡槽17外设有二级轴承21,齿轮盖圈16上设有轴心孔1601,二级轴承21的外圈与齿轮盖圈16的轴心孔1601形成固定连接;二级轴承21的内圈与芯棒卡槽17的外侧表面形成固定连接。
198.实施例18
199.其余与实施例17的方案一致,二级轴承21的外圈与齿轮盖圈16的轴心孔1601形成可拆卸的固定连接;二级轴承21的内圈与芯棒卡槽17的外侧表面形成可拆卸的固定连接。
200.在外力的作用下控制手柄壳体12整体发生绕轴线的旋转运动时,固定在手柄壳体12上的齿圈2跟着旋转,带动与之啮合的齿圈配合齿轮5旋转,齿圈配合齿轮5带动与之固定连接的齿轮连接棒6和连接齿轮7一起旋转,连接齿轮7带动与之啮合的啮合齿轮9旋转,啮合齿轮9带动与之啮合的固定齿轮10旋转,固定齿轮10带动与之固定连接的芯棒卡槽17旋转,芯棒卡槽17带动芯棒11旋转,从而带动与芯棒11固定连接的手术钳头旋转;定位板限位孔1804通过销钉与齿轮连接棒6相适配。
201.芯棒卡槽17带动芯棒旋转的同时,芯棒卡槽17带动二级轴承21的内圈一起旋转,二级轴承21的外圈固定连接在齿轮盖圈16上不动,二级轴承21起到一个运动顺滑的目的,固定齿轮10的端面是用于限制轴承的轴向运动,不是连接固定的部件;
202.实施例19
203.其余与实施例1-18的任一方案一致,弧形片状结构两端部的上侧表面设有限位凸起,弧形限位凹槽设于限位凸起上。
204.实施例20
205.其余与实施例11-19的任一方案一致,齿圈2与齿圈配合齿轮5的传动比为3:1;啮合齿轮9与固定齿轮10的传动比为1:3;啮合齿轮9与连接齿轮7的传动比为1:1;所以目前齿圈2的齿数为51齿,齿圈配合齿轮5的齿数为17齿,连接齿轮7和啮合齿轮9的齿数均为15齿,固定齿轮10的齿数为45齿;通过设计齿轮的传动比,使得手柄壳体12旋转的角度和钳头旋转的角度始终保持一致,同步转动;因为考虑到安装位置,总体传动比为1:1,前部分为3:1,后部分为1:3,当然就是总体达到1:1,同步旋转的都可以,这里综合考虑了齿轮的大小、装配的位置以及齿轮啮合的正反转等情况。
206.实施例21
207.其余与实施例11-20的任一方案一致,固定件18前端固定连接旋转件8,旋转件8处于芯棒11的轴线上,且与芯棒11同轴心,旋转件8内固定连接外管1,固定件18后方固定连接齿轮盖圈16,齿轮盖圈16固定连接球关节的底座,球关节和摇杆铰接,摇杆底面和卡扣固定连接,再通过驱动线使得摇杆不会随意运动。
208.实施例22
209.其余与实施例11-21的任一方案一致,本实用新型在实施时,芯棒11一端穿过固定件18、旋转件8、关节外管1、柔性关节后连接有手术钳头;芯棒11和手术钳头固定连接;
210.关节外管1的一端与旋转件8的管状结构的内腔固定连接,关节外管1另一端与柔性关节固定连接;柔性关节位于关节外管1前方,柔性关节位于手术钳头后方并与其铰接,即柔性关节可以和手术钳头发生相对转动;
211.关节外管1还可一端穿过旋转件的管状结构,设于旋转件8的管状结构内的部分与旋转件8的管状结构的内腔固定连接;关节外管1另一端与柔性关节固定连接;柔性关节位于关节外管前方,柔性关节位于手术钳头后方并与其铰接,即柔性关节可以和手术钳头发生相对转动;
212.芯棒11在外力的作用下,可以相对于固定件18、旋转件8、关节外管1、柔性关节进行往复移动或旋转;
213.实施例23
214.其余与实施例22的方案一致,柔性关节的驱动线依次通过外管1的内腔和芯棒11的外表面形成的空隙、限位管1802的内腔与芯棒11的外表面形成的空隙、固定件18的盖体结构1801上的驱动线孔1805、盖体结构1801的外表面、齿轮盖圈16的外表面、卡扣15上的定位孔并固定在卡扣15上的卡扣定位孔1504上。摇杆13通过配合可以进行万向运动,带动驱动线运动,达到控制柔性关节的弯曲的目的。
215.实施例24
216.其余与实施例23的方案一致,柔性关节的驱动线设有至少三条。
217.实施例25
218.其余与实施例23或24的方案一致,柔性关节的驱动线设有四条;
219.驱动线穿过卡扣定位孔1504限位在卡扣定位槽1503内,限位为驱动线穿过卡扣定位孔1504在卡扣定位槽1503内打结形成固定连接,卡扣定位槽1503内设有粘接胶层,粘接胶层用于稳固连接。
220.驱动线的材质为合金丝,限位凹槽1403和圆柱限位凸台1303的作用是限制球关节14的一个自由度,即防止球关节自转,球关节14自身带着x、y和自旋转三个自由度,限制掉自旋转的自由度才能使用,摇杆13在x方向沿着凹槽做往复运动,在y方向还可以做往复运动因为是圆柱限位凸台1303的形状设置,摇杆13还可以在限位凹槽1403中旋转的,这就达到了两个方向的运动,组和起来就是万向运动。
221.实施例26
222.其余与实施例11-25的方案一致,芯棒11前端连接手术钳头的尾端,手术钳头类似与剪刀的结构,芯棒11沿一级限位凹槽的方向做往复运动时带动钳头的开合,同时芯棒运动圈3的支撑杆302在让位开口18011内做往复运动。
223.以上实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并
不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1