身体可穿戴支具的制作方法
本发明涉及一种身体可穿戴支具,该身体可穿戴支具适用于允许在手臂上穿戴支具的用户动态地移动他或她的上臂、前臂和手腕,例如,同时减少用户手臂的不自主运动。
背景技术:
1、西班牙专利申请es2260986描述了一种用于控制前臂旋前和旋后移动的矫正器,其允许调节手腕相对于前臂的轴线的相对旋转移动。已知的矫正器适用于阻止诸如特发性震颤的不自主移动,同时仍然允许用户在较宽的运动范围内进行自主移动。也就是说,像本发明一样,已知的装置允许穿戴该装置的用户的手臂的动态移动,这与将用户的手臂的位置静态固定的支具相反,因为这些支具例如帮助用户伸展,但是不允许用户自由运动以进行日常生活活动。
2、已知的矫正器包括主杆,该主杆在两个点处附接到用户,一个点在尺骨上靠近尺骨鹰嘴处,并且另一个点在手腕上的尺骨侧。在尺骨上靠近尺骨鹰嘴的附接点处,允许旋转移动,但不允许纵向移动;并且在主杆与手腕的附接点处,允许纵向移动,但不允许旋转移动。为此目的,主杆具有用作线性导向件的顶部部分和圆形底部部分,该顶部部分穿过不允许主杆旋转的滑动件,并且其中,该底部部分插入具有轴向保持力的轴承中。已知的矫正器借助于位于前臂上的腕带和带子附接到用户,其中,杆经由滑动件连接到手腕条带,并且通过用于轴承支撑的前臂支撑件连接到带子。
3、尽管已知的装置可以用于抑制特发性震颤患者前臂的不自主移动,但是将该装置附接到用户的手腕、前臂和上臂可能是困难的,尤其是对于患有震颤病症的患者而言。
4、本发明的目的是至少部分地克服这个缺点。
技术实现思路
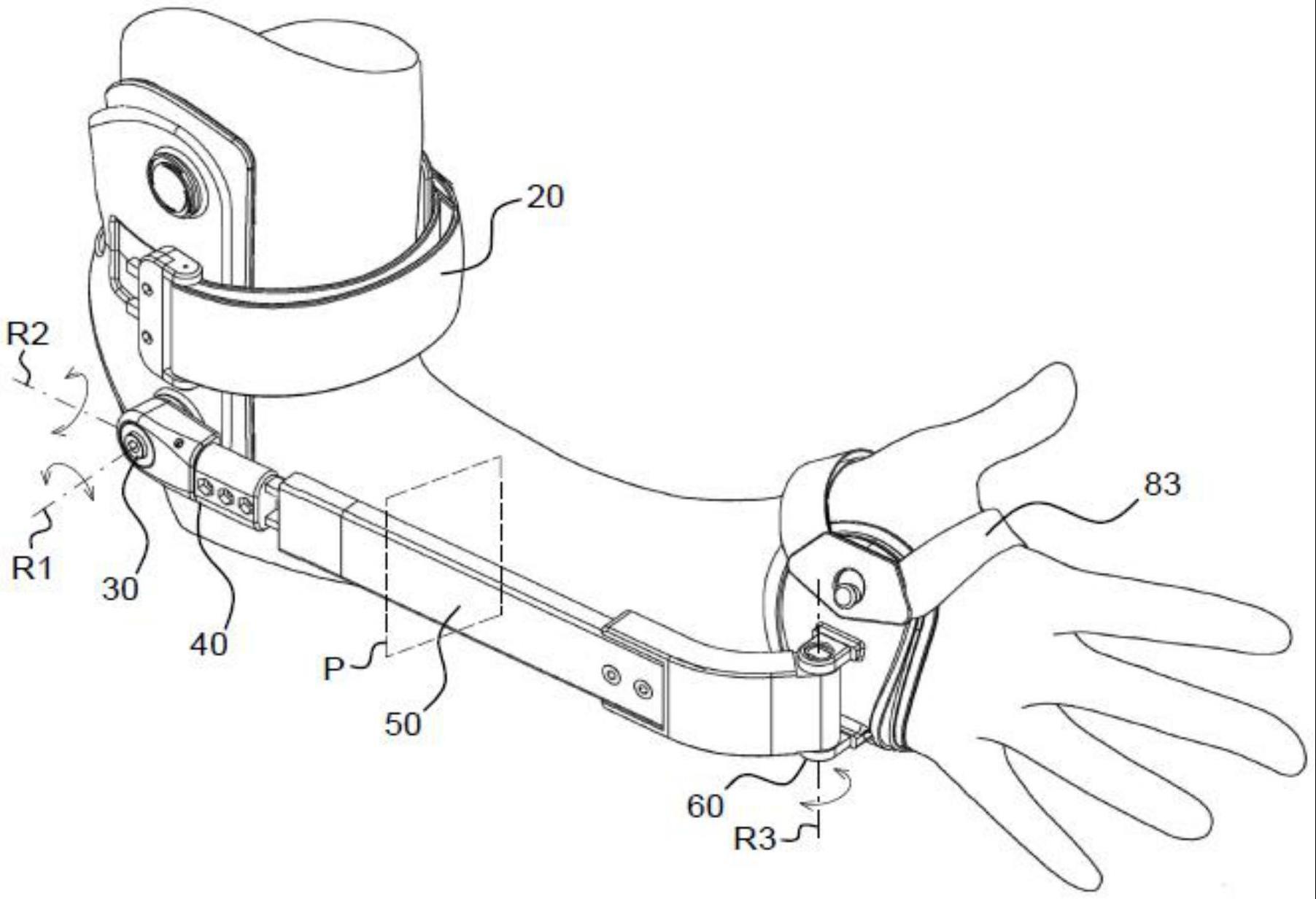
1、为此目的,本发明提供了一种身体可穿戴支具,其适用于允许在他或她的手臂上穿戴该支具的用户动态地移动他或她的上臂、前臂、手腕和手,该支具包括:上臂件,该上臂件用于将支具连接到用户的上臂;手持件,该手持件用于连接到用户的手;肘部屈曲伸展关节,即efe关节,该efe关节包括第一部分和第二部分,该第一部分固定到上臂件,并且该第二部分可相对于上臂件围绕第一旋转轴线旋转,以允许肘部屈曲和伸展;前臂旋前旋后关节,即fps关节,该fps关节包括第一部分和第二部分,该第一部分固定到efe关节的第二部分,并且该第二部分可相对于fps关节的第一部分和efe关节的第二部分围绕第二旋转轴线旋转,以允许前臂的旋前和旋后;伸展元件,该伸展元件在纵向方向上伸展并且包括第一部分和第二部分,该第二部分可相对于该第一部分沿着纵向方向移动,其中,该伸展元件的第一部分固定到fps关节的第二部分;手腕屈曲伸展关节,即wfe关节,该wfe关节包括第一部分和第二部分,该第二部分可相对于该第一部分围绕第三旋转轴线旋转,以允许手腕的屈曲和伸展,其中,该wfe关节的第一部分直接或间接地连接到伸展元件的第二部分,并且其中,该wfe关节的第二部分直接或间接地连接到手持件。为了戴上该装置,用户可以简单地将上臂件连接到他或她的上臂,并且将手持件连接到他或她的手上;不需要将绑带或类似物连接到用户的前臂上来让用户穿戴支具。
2、伸展元件可以包括在第一部分与第二部分之间的一个或多个中间部分,该伸展元件允许用户戴上和穿戴支具,而不必首先手动地使支具适应用户前臂的长度。伸展元件可以进一步补偿用户肘部旋转轴线与efe关节第一旋转轴线之间的任何不对准。与efe关节、fps关节和wfe关节结合,伸展元件允许肘部屈曲/伸展、前臂旋前/旋后以及手腕屈曲/伸展,同时支具仍然为用户的手提供支撑。支具因此提供了至少三个运动自由度。
3、该支具可以有助于减少肘部屈曲伸展、前臂旋前旋后、手腕内收外展、waa和/或手腕屈曲伸展期间的不自主运动,同时允许穿戴该装置时手臂的动态移动。efe、fps、waa和wfe不自主运动可以分别包括efe、fps、waa和wfe震颤。
4、震颤是身体部分的大致正弦的不自主振动,主要发生在上肢,包括用户的上臂、前臂和手腕。上肢震颤主要表现为肘部屈曲/伸展震颤、前臂旋前/旋后震颤、手腕外展/内收震颤和/或手腕屈曲/伸展震颤。主震颤频率在3-7hz之间变化,而较高频率的次分量可能在8-12hz范围内。虽然震颤频率通常不随时间显著变化,例如在10秒内仅变化约±0.5hz或更小,但是震颤的幅度可能在短时间段内变化相当大。主频率包含大量的震颤能量,大约86%,并且是执行任务时的最大阻碍,使得高次谐波的影响可忽略不计。
5、第二旋转轴线与基本上垂直于第一旋转轴线的轴线所成的角度通常在0度至25度之间、优选地在5度至15度之间。第三旋转轴线通常基本上垂直于第二旋转轴线。
6、支具是便携式的,也就是说,用户可以穿戴它而不需要附加支撑(诸如支架或类似物)来支承支具的重量。整个支具的重量通常小于2kg。
7、在实施例中,支具被实施为使得当穿戴时,支具的任何部分都不完全包围用户前臂靠近肘部的部分。以这种方式,前臂的肌肉伸展/收缩不影响支具的穿戴方式,并且通过前臂的血液流动不受支具的限制。
8、在实施例中,支具适用于在使用期间与用户的前臂完全间隔开。因此,为了戴上支具,将上臂件附接到用户的上臂,并且将手持件附接到用户的手上就足够了。由于用户不需要将支具的任何部分安装到她或他的前臂上,因此该支具例如与es2260986中描述的支具相比可以相对紧凑和/或重量轻。此外,通过确保支具保持与前臂间隔开,可以避免支具在敏感区域(诸如用户的腕管)上施加压力。
9、在实施例中,当穿戴时,上臂件沿着上臂的纵向方向延伸的长度超过用户的上臂的长度的至少四分之一。支具适用于将手施加在手持件上的力(例如由于前臂或手的(不自主)移动)经由伸展元件和上臂件传递到用户的上臂。
10、在实施例中,当从垂直于纵向方向的平面上的投影看时,第三旋转轴线与伸展元件的第一部分间隔开至少0.7cm的距离,并且优选地小于7cm、优选地在2cm与5cm之间。以这种方式可以防止当穿戴支具的用户屈曲她或他的手腕时,屈曲移动被用户的手腕与伸展元件或wfe关节的接触所阻止。
11、在另一实施例中,wfe关节是双关节,该双关节包括一对耦接关节。该机构防止旋转关节独立旋转,但仅允许关节的联动移动。因此,当用户的手腕在手持件中屈曲和伸展时,联动移动使得伸展元件能够保持靠近用户的手臂。
12、在实施例中,当从平行于并穿过第二旋转轴线的平面上的投影看时,伸展元件的纵向方向与第二旋转轴线所成的角度在0度至30度之间、优选地在0度至15度之间、更优选地在5度至12度之间,例如10度。当纵向方向与第二旋转轴线成非零角度时,从伸展元件到手持件的最短距离小于从第二旋转轴线到手持件的最短距离,从而允许伸展元件在使用期间保持靠近用户的前臂。
13、在实施例中,伸展元件的第一部分可旋转地固定到fps关节的第一部分,并且伸展元件的第二部分相对于wfe关节的第一部分围绕平行于伸展元件的纵向方向的轴线的旋转基本上被阻止。以这种方式,可以减少手腕和/或前臂的不自主运动,例如震颤。
14、在实施例中,手持件设置有手腕内收外展关节,即waa关节,该waa关节包括第一部分和第二部分,该第二部分可相对于该第一部分围绕第四旋转轴线旋转,其中,该waa关节连接在手持件与伸展元件的第二部分之间,以允许用户的手腕的内收和外展。例如,waa关节可以允许从手腕的中立位置起超过45度的内收和外展。waa关节的第一部分可以相对于伸展元件的第二部分固定,并且waa关节的第二部分可以相对于wfe关节的第一部分固定,使得waa关节将伸展元件与wfe关节互连。可选地,waa关节的第一部分可以相对于wfe关节的第二部分固定,并且waa关节的第二部分可以相对于手持件固定,使得waa关节将wfe关节与手持件互连。
15、在实施例中,efe关节、wfe关节、fps关节和/或waa关节包括运动抵抗元件,该运动抵抗元件适用于在等于或低于阈值的扭矩下抵抗关节的第一部分相对于关节的第二部分的旋转。当施加高于阈值的扭矩时,运动抵抗元件通常允许其相关联关节在其整个运动范围内旋转。
16、在实施例中,efe关节、wfe关节、fps关节和/或waa关节包括运动抵抗元件,该运动抵抗元件适用于抵抗关节的快速旋转多于关节的慢速旋转。运动抵抗元件通常允许其相关联关节在其整个运动范围内旋转,如果关节的第一部分和第二部分以较高速度相对于彼此旋转,则该运动抵抗元件可以在其关节上施加比第一部分和第二部分以较低速度相对于彼此旋转时更大的抵抗力。这允许比自主运动更有效地抑制高速运动,例如具有2hz或更高频率的震颤。
17、在实施例中,efe关节、wfe关节、fps关节和/或waa关节设置有阻尼器,诸如流体阻尼器、液体阻尼器和/或摩擦阻尼器,用于抑制关节的第一部分相对于关节的第二部分的旋转。阻尼器可以是参考前面的实施例描述的运动抵抗装置。如果efe关节、wfe关节、fps关节和/或waa关节包括阻尼器,则这分别有助于吸收任何efe、wfe、fps和/或waa不自主运动。
18、例如,在使用摩擦阻尼器时,在关节的第一部分与第二部分之间的扭矩等于或低于预定阈值的情况下,摩擦阻尼器可以基本上阻止第一部分相对于第二部分的移动,并且在其他情况下允许这种移动。在使用流体或液体阻尼器的情况下,阻尼器可以具有比较慢运动更大程度地抑制较快运动的阻尼系数。
19、在下表中,提供了这些关节中的每个关节的阈值的合适范围的示例,给出了关节设置有摩擦阻尼器的情况和关节设置有流体阻尼器或液体阻尼器的情况:
20、
21、
22、在实施例中,伸展元件设置有运动抵抗元件,该运动抵抗元件适用于抵抗其第一部分相对于其第二部分的平移运动。在伸展元件设置有摩擦阻尼器的情况下,为了使第一部分和第二部分相对于彼此移动而沿着第一部分与第二部分之间的纵向方向施加的力阈值在5n至30n的范围内。在伸展元件设置有流体阻尼器或液体阻尼器的情况下,其阻尼器系数优选地在100至600n/(m/s)的范围内,速度为0.05m/s。运动抵抗元件通常允许伸展元件的第一部分和第二部分在其整个运动范围内沿着纵向方向平移。
23、在实施例中,efe关节、wfe关节、fps关节和/或waa关节是非偏置的。也就是说,一个或多个关节不会将肘部、前臂和/或手腕推向固定位置。例如,这可以通过确保运动抵抗元件或阻尼器也是非偏置的来实现。
24、在实施例中,伸展元件的第一部分可相对于伸展元件的第二部分沿着纵向方向移动至少2cm的距离、优选地2cm至30cm的距离、更优选地4cm至18cm的距离。
25、在实施例中,伸展元件设置有一个或多个轴承,诸如滚柱轴承和/或低摩擦轴承(诸如由聚四氟乙烯制成),用于允许第二部分相对于第一部分平滑滑动。例如,伸展元件可以形成为滑轨,该滑轨包括导轨中的低摩擦塑料导向滑架元件。
26、在实施例中,伸展元件包括:第一构件,诸如梁,该第一构件包括伸展元件的第一部分;以及第二构件,诸如梁,该第二构件包括伸展元件的第二部分,其中,第二构件相对于第一梁沿着纵向方向基本上自由滑动,优选地,其中,第二构件相对于第一梁可旋转地固定。伸展构件可以包括在第一构件与第二构件之间的一个或多个中间构件,诸如梁。
27、在实施例中,当被用户穿戴时,支具适用于允许用户的前臂在用户的前臂至少90度旋前到用户的前臂至少90度旋后的范围内基本上自由旋前和旋后,和/或允许用户的手腕在用户的手腕至少45度屈曲到用户的手腕至少60度伸展的范围内基本上自由屈曲和伸展。当用户的前臂没有旋后或旋前时,前臂被定义为处于旋后和旋前的中间位置,并且当用户的手腕没有屈曲或伸展时,手腕被定义为处于屈曲和伸展的中立位置。支具允许的动态移动包括用户的前臂的基本上自由的旋前和旋后,以及用户的手腕的基本上自由的屈曲和伸展。优选地,当用户穿戴支具时,支具不限制用户的肘部可以屈曲/伸展的程度,使得支具也允许用户的肘部基本上自由屈曲/伸展。
28、在实施例中,上臂件、efe关节、fps关节、伸展元件、wfe关节、waa关节和/或手持件可被配置为在用户的右臂和左臂上使用。以这种方式,相同的一个或多个部件可以用于构造用于左手使用的支具和用于右手使用的支具。通常,部件中的一个或多个将具有至少一个对称平面来实现这一点。
29、在实施例中,上臂件设置有第一附接元件和与该第一附接元件间隔开的第二附接元件,其中,efe关节的第一部分借助于第一附接元件或第二附接元件附接到上臂件。通常,当上臂件具有对称平面时,第一附接元件和第二附接元件将位于所述平面的不同侧上。
30、在实施例中,上臂件包括外壳,该外壳适用于在使用期间布置在用户的上臂的肱三头肌侧,并且其中,该外壳在用户的上臂的肱二头肌侧是端部开口的,以允许用户的上臂从开口端插入。因此,外壳不会防止用户的肱二头肌的收缩或放松。外壳通常具有基本上u形的截面,以允许该外壳部分地围绕用户的上臂放置。u形外壳支撑上臂,并且可以为伸展元件提供支撑以减少fsp震颤。
31、上臂件可以进一步设置有上臂绑带,该上臂绑带适用于围绕用户的手臂的、位于手臂的弯曲部上方和用户的肱二头肌的下方或下侧处的一部分放置,并且适用于连接到外壳。绑带和外壳一起适用于将上臂件相对于用户的上臂保持在适当位置。优选地,上臂件进一步包括磁性搭扣,该磁性搭扣用于将上臂绑带的一部分相对于外壳保持在适当位置。us10,617,179b2中描述了一种合适的磁性搭扣,该专利通过援引以其全文并入本文。当绑带围绕用户的手臂放置并且搭扣闭合时,绑带将上臂件相对于上臂保持在适当位置。当绑带松开并且搭扣打开时,用户可以很容易地将她或他的上臂放入上臂件中。
32、在实施例中,上臂件的外壳包括基本上刚性材料,该材料足够刚性以允许外壳在用户穿戴期间保持其形状。例如,上臂件的外壳可以包括刚性塑料材料。
33、在实施例中,手持件包括:
34、-外壳,该外壳包括基本上刚性部分,该基本上刚性部分适用于在使用期间支撑用户的手的尺骨侧和背侧,同时与用户的手的桡骨侧间隔开;或者
35、-外壳,该外壳包括基本上刚性部分,该基本上刚性部分适用于在使用期间支撑用户的手的桡骨侧和背侧,同时与用户的手的尺骨侧间隔开;或者
36、-外壳,该外壳包括基本上刚性部分,该基本上刚性部分适用于在使用期间支撑用户的手的桡骨侧或背侧,同时与用户的手的尺骨侧间隔开。
37、在每种情况下,外壳具有开口端,使得一旦用户已经戴上上臂件,他或她可以通过弯曲肘部经由开口端容易地将他或她的手放入外壳中。基本上刚性部分确保在正常穿戴期间当手放置在手持件中时,手由所述刚性部分支撑。
38、手持件可以进一步设置有一条或多条绑带,诸如手腕绑带和/或手掌绑带,该手腕绑带和/或手掌绑带分别用于围绕用户的手腕或手掌放置并且连接到外壳。优选地,手持件包括一个或多个磁性搭扣,例如在us10,617,179b2中描述的用于将一条或多条绑带的一部分相对于外壳的基本上刚性部分保持在适当位置的磁性搭扣。
39、在实施例中,手持件由刚性元件组成,该刚性元件被配置为接收用户的手的背侧,并且带有绑带以将该刚性元件保持在手上的此位置。
40、在实施例中,手持件的外壳的基本上刚性部分包括可变形金属片材,该可变形金属片材用于允许手持件的形状被调整到适合用户的手。虽然在正常穿戴期间,刚性部分基本上不会变形,但是可以使外壳适合用户的手。优选地,外壳进一步包括一层或多层塑料,例如覆盖金属片材的塑料叠层,其在塑料层的内侧的顶部上可选地具有一层织物和/或泡沫。织物和/或泡沫层可拆卸地安装在手持件上,使得它们可以单独清洗。
41、在实施例中,支具是完全无源的。因此,在该装置上没有设置电子、液压或气动主动驱动的致动器或其他电气部件来驱动该装置的部分围绕第一旋转轴线、第二旋转轴线、第三旋转轴线和/或第四旋转轴线的旋转。该无源装置可以以简单且成本有效的方式构造,并且可以在不需要用户携带外部电源的情况下使用。整个被动支具的重量通常小于1kg,例如小于0.5kg。
42、在实施例中,支具设置有一个或多个传感器,一个或多个传感器用于感测支具的一个部分与支具的另一个部分的相对位置,和/或施加在支具的一个部分与支具的另一个部分之间的扭矩。例如,传感器可以感测efe关节、fps关节、wfe关节和/或waa关节的第一部分与第二部分的相对位置。伸展元件可以设置有传感器,该传感器用于感测该伸展元件的第一部分和第二部分的相对位置。用于efe关节、fps关节、waa关节和wfe关节的合适传感器的示例包括用于检测这些关节的两个部分之间的旋转角度和/或速度的旋转编码器、用于测量这些关节的两个部分之间的扭矩的扭矩传感器。惯性测量单元(imu)可以设置在支具上,例如设置在上臂件的外壳上和/或手持件的外壳上。例如,efe关节、fps关节、伸展元件、waa关节和/或wfe关节中的每一个都可以设置有i)用于感测关节的第一部分和第二部分的相对位置的传感器,ii)测量关节的第一部分与第二部分之间的扭矩的传感器,和/或iii)测量手持件和/或上臂件的绝对加速度或绝对角速度的传感器。
43、在该实施例中,从传感器获得的传感器数据可以用于分析用户的移动模式。例如,efe关节、fps关节、waa关节和wfe关节中的一个或多个可以设置有旋转编码器,该旋转编码器用于分别检测efe关节的第一部分相对于efe关节的第二部分围绕第一旋转轴线的旋转角度、fps关节的第一部分相对于fps关节的第二部分围绕第二旋转轴线的旋转角度、waa关节的第一部分相对于waa关节的第二部分围绕第二旋转轴线的旋转角度以及wfe关节的第一部分相对于wfe关节的第二部分围绕第三旋转轴线的旋转角度。
44、在实施例中,efe关节、fps关节、waa关节、wfe关节和/或伸展元件设置有致动器,该致动器用于在用户穿戴支具时将关节的第一部分和第二部分推到可调节位置。合适的致动器包括如技术人员所知的电子致动器、液压致动器或气动致动器,例如电动马达、压电元件。致动器可以用于让穿戴该装置的用户体验模拟的震颤,和/或设置由关节提供的运动抑制的程度。当支具还设置有如上所述的传感器时,致动器可以用于抵消由传感器感测到的一部分不自主运动,或者产生中风患者康复所需的运动。
45、在实施例中,伸展元件设置有线性致动器,该线性致动器用于驱动伸展元件的第一部分与第二部分之间的线性移动。
46、在实施例中,efe关节、fps关节、waa关节、wfe关节和/或伸展元件设置有致动器,该致动器用于限制不自主运动,同时允许自主运动。除了上述电动致动器、液压致动器或气动致动器之外,合适的致动器还包括电动马达、液压马达或气动马达、阻尼器、制动器和/或离合器,它们可以限制运动,但是不能推动移动以驱动用户肘部的伸展/屈曲、用户前臂的旋前/旋后、用户手腕的伸展/屈曲和/或手腕的内收/外展。致动器可以适用于抵抗关节的第一部分相对于关节的第二部分以等于或大于阈值的角速度的旋转多于关节的第一部分相对于关节的第二部分以低于阈值的角速度的旋转。例如,可以将阈值设置为约12.6弧度/秒的角速度,这将比更低频率的移动更大程度地抑制2hz的震颤。优选地,在支具上设置一个或多个如本文描述的传感器,以能够获得移动是自主的还是不自主的度量。
47、在实施例中,支具包括efe关节、fps关节、伸展元件、wfe关节和手持件,其中,该fps关节具有与efe关节的壳体集成的第一部分和被配置为相对于该第一部分围绕第二旋转轴线r2旋转的第二部分。fps关节的第二部分集成在伸展元件中。支具进一步包括在fps关节的第一部分与第二部分之间伸展的轴,该伸展元件可以沿着该轴移动,以允许调整支具的长度。
- 还没有人留言评论。精彩留言会获得点赞!