基于工作体积映射的路径规划的制作方法
本技术整体涉及路径规划,并且更具体地涉及基于映射的工作体积和禁飞区的路径规划。
背景技术:
1、外科手术机器人可辅助外科医生或其他医疗提供者执行外科手术,或者可自主完成一个或多个外科手术。外科手术机器人可被配置为在外科手术期间定向端部执行器和/或工具。
技术实现思路
1、本公开的示例性方面包括:
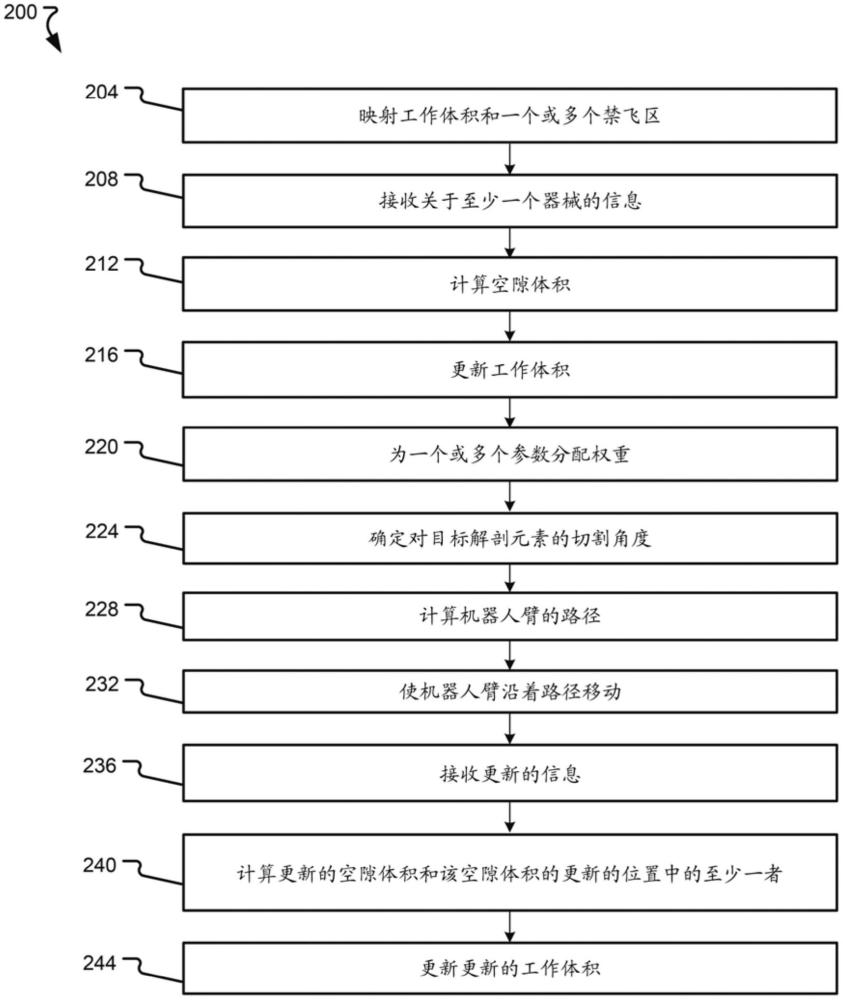
2、根据本公开的至少一个实施方案的用于规划路径的方法包括:映射工作体积和一个或多个禁飞区,该工作体积限定机器人能够访问的体积,并且该一个或多个禁飞区中的每个禁飞区限定机器人被限制访问的至少一个体积;接收关于至少一个器械的位置的信息;基于该至少一个器械的该位置来计算空隙体积;更新该工作体积来包含该空隙体积以产生更新的工作体积;以及计算机器人的机器人臂从患者解剖结构之外到该患者解剖结构内的路径,该路径在该更新的工作体积内并且避开该一个或多个禁飞区。
3、本文的方面中的任一者,其中从导航相机、电磁导航系统或激光雷达导航系统中的至少一者接收关于该至少一个器械的该位置的该信息。
4、本文的方面中的任一者,其中该至少一个器械为牵开器。
5、本文的方面中的任一者,其中该至少一个器械是端口和管状牵开器中的至少一者。
6、本文的方面中的任一者,其中确定该空隙体积进一步基于该至少一个器械的已知尺寸。
7、本文的方面中的任一者,其中限定该空隙体积的空隙包括切口。
8、本文的方面中的任一者还包括:接收关于外科手术室的信息,其中该信息是图像、传感器数据、电磁数据或激光雷达数据中的至少一者;识别该图像中的一个或多个障碍物;以及基于所识别的一个或多个障碍物来限定该一个或多个禁飞区。
9、本文的方面中的任一者,其中限定该一个或多个禁飞区包括确定一个或多个对象的外边界。
10、本文的方面中的任一者,其中计算该路径进一步基于一个或多个参数,并且其中该方法还包括为该一个或多个参数中的每个参数分配权重。
11、本文的方面中的任一者,其中人工智能使用一个或多个数据模型来分配该权重。
12、本文的方面中的任一者还包括:接收关于该至少一个器械的更新的位置的更新的信息;基于该至少一个器械的该更新的位置来计算更新的空隙体积和该空隙体积的更新的位置中的至少一者;以及基于该更新的空隙体积和该空隙体积的该更新的位置中的至少一个来更新该更新的工作体积。
13、本文的各方面中的任一者还包括:使该机器人臂沿着该路径移动。
14、本文的方面中的任一者还包括:基于避开该一个或多个禁飞区来确定对目标解剖元素的切割角度,其中计算该路径进一步基于所确定的切割角度。
15、本文的方面中的任一者,其中该一个或多个禁飞区包括该至少一个器械。
16、一种根据本公开的至少一个实施方案的用于规划路径的装置包括:至少一个处理器;和存储器,该存储器存储用于由该至少一个处理器处理的数据,该数据在被处理时使该至少一个处理器:映射工作体积和一个或多个禁飞区,该工作体积限定机器人能够访问的体积,并且该一个或多个禁飞区中的每个禁飞区限定机器人被限制访问的至少一个体积;接收关于至少一个器械的位置和切口的维尺寸的信息;基于该至少一个器械的该位置和该切口的该等尺寸来计算空隙体积;更新该一个或多个禁飞区以移除该空隙体积;以及计算机器人的机器人臂从患者解剖结构之外到该患者解剖结构内的路径,该路径避开该一个或多个禁飞区。
17、本文的方面中的任一者,其中一个或多个标记附接于该至少一个器械,并且从被配置为检测该一个或多个标记的位置的导航相机接收关于该至少一个器械的该位置的该信息。
18、本文的方面中的任一者,其中该存储器存储用于由该处理器处理的另外的数据,该另外的数据在被处理时使该处理器:接收该切口的图像;以及从该图像确定该切口的该等尺寸。
19、本文的方面中的任一者,其中该存储器存储用于由该处理器处理的另外的数据,该另外的数据在被处理时使该处理器:接收关于该至少一个器械的更新的位置的更新的信息;基于该至少一个器械的该更新的位置来计算更新的空隙体积和该空隙体积的更新的位置中的至少一者;以及基于该更新的空隙体积和该空隙体积的该更新的位置中的至少一者来更新该更新的工作体积。
20、本文的方面中的任一者,其中确定该空隙体积进一步基于该至少一个器械的已知尺寸。
21、一种根据本公开的至少一个实施方案的用于定向机器人臂的系统包括:机器人臂;至少一个处理器;和存储器,该存储器存储用于由该至少一个处理器处理的数据,该数据在被处理时使该至少一个处理器:映射工作体积和一个或多个禁飞区,该工作体积限定机器人能够访问的体积,并且该一个或多个禁飞区中的每个禁飞区限定机器人被限制访问的至少一个体积;接收关于至少一个器械的位置的信息;基于该至少一个器械的该位置来计算空隙体积;更新该工作体积来包含该空隙体积以产生更新的工作体积;基于该更新的工作体积来计算机器人的机器人臂从患者解剖结构之外到该患者解剖结构内的路径,并且该路径避开该一个或多个禁飞区;以及使该机器人臂沿着该路径移动。
22、任何方面与任一个或多个其他方面组合。
23、本文所公开特征中的任一者或多者。
24、本文大体上公开特征中的任一者或多者。
25、本文大体上公开的特征中的任一者或多者与本文大体上公开的任一个或多个其他特征组合。
26、方面/特征/实施方案中的任一者与任一个或多个其他方面/特征/实施方案组合。
27、使用本文所公开的方面或特征中的任一者或多者。
28、应当理解,本文所述的任何特征可与如本文所述的任何其他特征组合来要求保护,而不管特征是否来自同一描述的实施方案。
29、本公开的一个或多个方面的细节在以下附图和说明书中示出。根据说明书和附图以及权利要求书,本公开中描述的技术的其他特征、目的和优点将是显而易见的。
30、短语“至少一个”、“一个或多个”以及“和/或”是在操作中具有连接性和分离性两者的开放式表述。例如,表述“a、b和c中的至少一个”、“a、b或c中的至少一个”、“a、b和c中的一个或多个”、“a、b或c中的一个或多个”以及“a、b和/或c”中的每个意指仅a、仅b、仅c、a和b一起、a和c一起、b和c一起,或a、b和c一起。当上述表述中的a、b和c中的每一者都指诸如x、y和z的一个元素或诸如x1-xn、y1-ym和z1-zo的一类元素时,短语意图指选自x、y和z的单个元素、选自同一类的元素(例如,x1和x2)的组合以及选自两类或更多类的元素(例如,y1和zo)的组合。
31、术语“一”实体是指一个或多个该实体。因此,术语“一”、“一个或多个”和“至少一者”在本文中可以可互换地使用。还应当注意,术语“包括”、“包含”和“具有”可以可互换地使用。
32、前述内容是本公开的简化概述以提供对本公开的一些方面的理解。本
技术实现要素:
既不是对本公开及其各个方面、实施方案和配置的广泛性概述也不是详尽性概述。其既不意图确定本公开的关键或重要元素,也不意图划定本公开的范围,而是以简化形式呈现本公开的选定概念,作为对下文呈现的更详细描述的介绍。如应当理解的,本公开的其他方面、实施方案和配置可能单独或组合地利用上文所阐述或下文所详细描述的特征中的一个或多个特征。
33、在考虑下文提供的实施方案描述之后,本发明的许多额外特征和优点对于本领域技术人员将变得显而易见。
- 还没有人留言评论。精彩留言会获得点赞!