一种基于导纳控制的刚柔耦合颈部辅助康复系统
本发明涉及康复医疗机器人领域,具体而言包括刚柔耦合并联机构的应用及计算机辅助康复训练。
背景技术:
1、近年来随着人们工作方式和工作节奏的变化,颈椎疾病的患病率逐年上升。现有的颈椎辅助康复产品大多基于单一的牵拉模式或固定轨迹的牵引运动。单一的牵拉模式需要患者固定躯干位置及颈椎姿态,严重影响了患者的生活质量;固定轨迹的牵引运动也仅能保证颈椎的运动而不能对运动过程中出现的干扰或冲击进行实时反馈与运动补偿。因此它们都并不能充分满足颈椎康复训练的需求。并联机构具有结构紧凑、运动灵活、承载能力强且累计误差小的优点,因此在颈椎康复领域的应用前景很广阔;大变形柔性铰链在保证功能方向的运动自由度的同时避免传统铰链的磨损及刚性冲击等问题;因此将柔性铰链与并联机构相结合设计出的刚柔耦合颈部辅助康复机构将同时具备运动灵活和抗冲击的特性。而在机构的运动控制方面,传统的位置控制只能使机构按照预先设定的某种运动轨迹进行运动,并不能在运动过程中根据所受外力进行实时调整,为使机构在与人交互的过程中表现出柔顺性,需要结合传感器测得的力或力矩制定机器人的上层控制方法,在此引入阻抗控制的概念,阻抗控制通过建立机器人末端位移和接触力之间的关系,将机器人力/位置控制系统等效为“质量-阻尼-弹簧”物理控制模型,通过调节惯性、阻尼、刚度参数实现机器人末端执行器和接触力的关系,在打磨、采摘、医疗康复等领域有诸多应用。
技术实现思路
1、为了弥补现有技术的不足,本发明提供了一种刚柔耦合颈部辅助康复系统,其具有运动灵活、结构紧凑、承载能力强、抗冲击抗震动、对外力干扰可以进行补偿等特点。
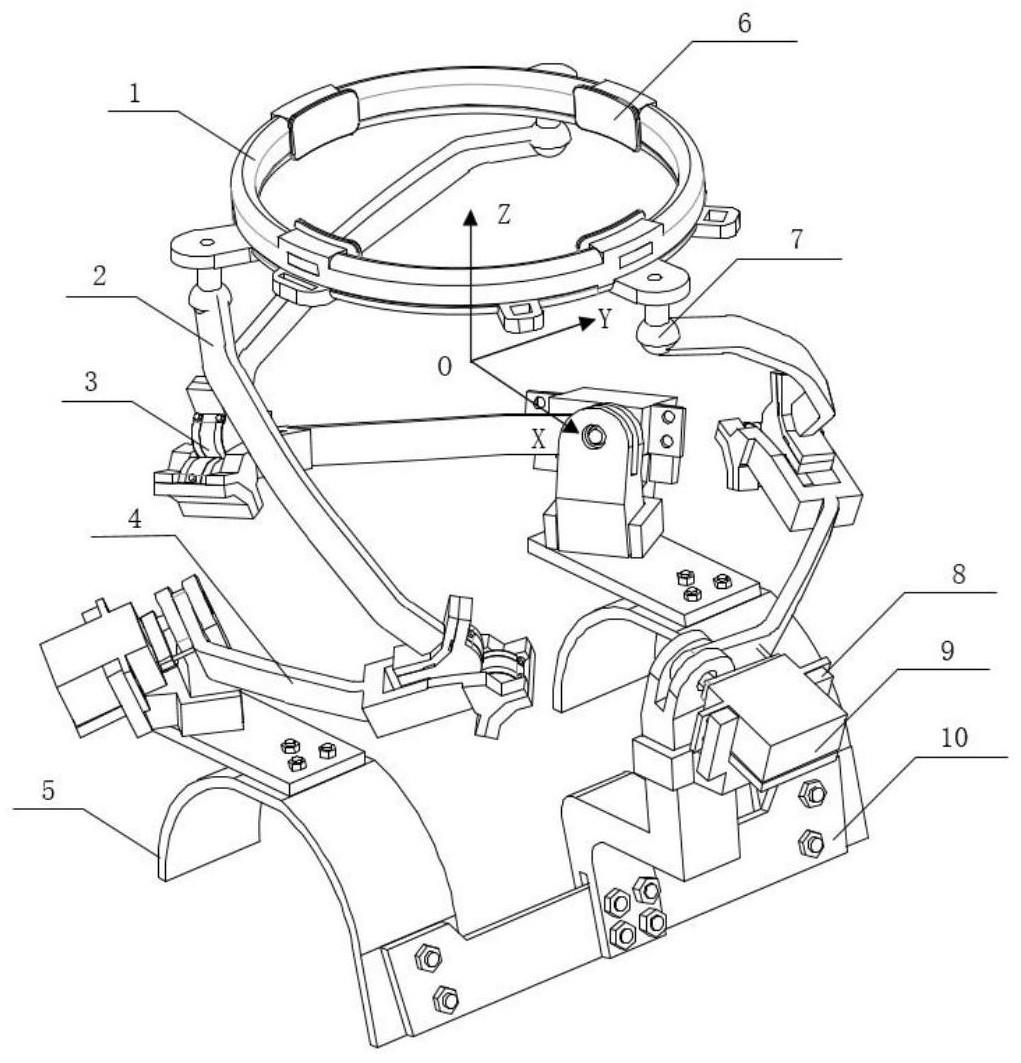
2、为实现上述目的,本发明采用以下技术方案来实现:刚柔耦合颈部辅助康复系统,包括头套1、肩套5及三个传动支链,三个传动支链位于头套和肩套之间,三个传动支链沿中心分布布置,用于连接头套1和肩套5:所述传动支链的一端通过转动副连接在肩套5上,该转动副将作为传动支链的驱动关节;另一端则通过球型铰链与头套1进行连接。每一个传动支链由主动杆4和从动杆2组成,而主动杆4与从动杆2之间通过辅助接触式柔性铰链3进行连接;头套1上设有三轴的力矩传感器6、微控制器及信号传输模块;肩套5上设有驱动电机9,其与主动杆4相连接,刚柔耦合颈部辅助康复设备通过微控制器控制驱动电机9驱动进行运动。驱动电机9受到驱动后,带动主动杆4进行旋转,主动杆4的旋转将带动从动杆2做转动,而由于三个传动支链的从动杆4的末端都与头套1相连接,将共同作用于头套1从而带动头套1运动,由于本身的结构特性,头套1的运动形式将为绕x、y、z三轴的定点转动。
3、作为本发明的一种优选技术方案,所述三个传动支链绕垂直轴中心对称布置,每一个传动支链的主动杆4和从动杆2均为弧形杆件;主动杆4的一端通过转动副与肩套5进行连接,另一端通过辅助接触式柔性铰链与从动杆2的一端进行连接;从动杆2的另一端则通过球型铰链7与头套1连接。
4、作为本发明的一种优选技术方案,所述辅助接触式柔性铰链采用s型片簧12与弧形辅助接触块11制作装配而成,每一个s型片簧的两端分别固定在上下两个辅助接触块的不同侧面上,相邻的s型片簧之间呈交叉布置。在辅助接触式柔性铰链绕铰链旋转轴进行弯曲的过程中,s型片簧将沿弧形辅助接触块11做没有相对滑动的滚转运动,在滚转的同时s型片簧会沿弧形辅助接触块表面进行弯曲。片簧所具备的柔性将使得铰链具备在功能方向上的转动自由度,而辅助接触块的存在将限制铰链在非功能方向上的偏移。所述片簧为s形片簧12。
5、作为本发明的一种优选技术方案,所述肩套5可以通过肩带与支撑板10固定在人体肩部,肩套5上安装有三个电机固定座8,驱动电机9安装在电机固定座8上,驱动电机9的传动轴与传动支链的主动杆4进行连接。
6、作为本发明的一种优选技术方案,所述头套2通过亲肤材质si-tpv固定于人体额部,头套上设有三轴力矩传感器6及与三轴力矩传感器6相配套的微控制器及信号传输模块。三轴力矩传感器6采集颈部辅助康复系统在运动过程中与人体头部间产生的力矩信号,微控制器接收所采集到的力矩信号并将其通过信号传输模块发送给电机控制系统,电机控制系统将力矩信号进行处理,最终得出对电机的驱动信号并将该信号发送给驱动电机9。
7、作为本发明的一种优选技术方案,所述三个分支主动杆与肩套相连的转动副的轴线方向与柔性铰链的转轴方向及头套上的球副的转轴方向,共同相交于球心一点,以此保证,该机构具有绕x、y、z轴的三个方向的转动自由度。
8、作为本发明的一种优选技术方案,所述电机控制系统接受头套上的信号传输模块发送来的力矩信息,并将头套上所受的力矩信息通过静力学逆解转化为施加在驱动关节上的等效力,用这个等效力根据设定的不同控制策略去调整驱动关节既定的转动角度,使得颈部辅助康复设备在运动过程中可以实时监测头套与头部之间的作用力并根据作用力调整头套的运动轨迹,进而调整头套与人体间的相互作用力。
9、采用上述技术方案所产生的有益效果在于:
10、1、基于3-rrs并联机构设计的颈部辅助康复设备具备了良好的承载能力和灵活的运动空间,同时其紧凑的结构使之具有便携性;
11、2、整体结构及支链的布局使得机构具备绕定点的三个转动自由度,与人体颈椎的运动空间相契合;
12、3、大变形柔性铰链的应用使设备具有了被动柔顺性,因而对冲击和振动具有一定的缓冲作用;
13、4、通过传感器及控制策略的应用使得颈部辅助康复设备可以对头套与人体之间的作用力进行监测与调整。
技术特征:
1.一种基于导纳控制的刚柔耦合颈部辅助康复系统,其特征在于,包括头套、肩套及三个传动支链,三个传动支链位于头套和肩套之间,三个传动支链沿中心分布布置,用于连接头套和肩套:所述传动支链的一端通过转动副连接在肩套上,该转动副将作为传动支链的驱动关节;另一端则通过球型铰链与头套进行连接;每一个传动支链由主动杆和从动杆组成,而主动杆与从动杆之间通过辅助接触式柔性铰链进行连接;头套上设有三轴的力矩传感器、微控制器及信号传输模块;肩套上设有驱动电机,其与主动杆相连接,刚柔耦合颈部辅助康复设备通过微控制器控制驱动电机驱动进行运动;驱动电机受到驱动后,带动主动杆进行旋转,主动杆的旋转将带动从动杆做转动,三个传动支链的从动杆的末端都与头套相连接,将共同作用于头套从而带动头套运动。
2.根据权利要求1所述的基于导纳控制的刚柔耦合颈部辅助康复系统,其特征在于,所述三个传动支链绕垂直轴中心对称布置,每一个传动支链的主动杆和从动杆均为弧形杆件;主动杆的一端通过转动副与肩套进行连接,另一端通过辅助接触式柔性铰链与从动杆的一端进行连接;从动杆的另一端则通过球型铰链与头套连接。
3.根据权利要求1所述的基于导纳控制的刚柔耦合颈部辅助康复系统,其特征在于,所述辅助接触式柔性铰链采用s型片簧与弧形辅助接触块制作装配而成,每一个s型片簧的两端分别固定在上下两个辅助接触块的不同侧面上,相邻的s型片簧之间呈交叉布置;在辅助接触式柔性铰链绕铰链旋转轴进行弯曲的过程中,s型片簧将沿弧形辅助接触块做没有相对滑动的滚转运动,滚转运动时,s型片簧沿弧形辅助接触块表面进行弯曲;s型片簧所具备的柔性将使得铰链具备在功能方向上的转动自由度,辅助接触块将限制铰链在非功能方向上的偏移。
4.根据权利要求1所述的基于导纳控制的刚柔耦合颈部辅助康复系统,其特征在于,所述肩套通过肩带与支撑板固定在人体肩部,肩套上安装有三个电机固定座,驱动电机安装在电机固定座上,驱动电机的传动轴与传动支链的主动杆进行连接。
5.根据权利要求1所述的基于导纳控制的刚柔耦合颈部辅助康复系统,其特征在于,所述头套通过亲肤材质si-tpv固定于人体额部,头套上设有三轴力矩传感器及与三轴力矩传感器相配套的微控制器及信号传输模块;三轴力矩传感器采集颈部辅助康复系统在运动过程中与人体头部间产生的力矩信号,微控制器接收所采集到的力矩信号并将其通过信号传输模块发送给电机控制系统,驱动电机控制系统将力矩信号进行处理,最终得出对驱动电机的驱动信号并将该信号发送给驱动电机。
6.根据权利要求1所述的基于导纳控制的刚柔耦合颈部辅助康复系统,其特征在于,所述三个分支主动杆与肩套相连的转动副的轴线方向与柔性铰链的转轴方向及头套上的球副的转轴方向,共同相交于球心一点,具有绕x、y、z轴的三个方向的转动自由度。
技术总结
本发明公开了一种基于导纳控制的刚柔耦合颈部辅助康复系统,包括头套、肩套及用于连接二者的三个支链,其中每个支链都由主动杆和从动杆组成,主动杆通过驱动关节联接在肩套上,并在另一端通过辅助接触式柔性铰链与从动杆进行联接,从动杆末端通过球铰与头套进行联接。头套上设有三轴力矩传感器及与传感器相配套的微控制器及信号传输模块,微控制器采集三个轴向的力矩信号并通过信号传输模块发送至计算机;计算机接收头套上的力矩信息并将其通过映射关系等效为驱动关节受到的力矩,驱动关节根据这个等效力矩及既定的导纳控制策略调整驱动关节的运动轨迹,使设备最终表现出对所受外力的实时反馈。
技术研发人员:郜益磊,刘婧芳
受保护的技术使用者:北京工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!