确定空间路径的方法、装置、设备和介质与流程
本公开涉及光学捕捉领域,具体涉及一种确定空间路径的方法、装置、设备和介质。
背景技术:
1、在将植入器件植入到内部结构不可见的目标对象内部时,需要首先确定植入器件空间路径。由于目标对象的内部结构不可见,相关技术中多采用高能射线源在至少两个照射角度照射目标对象,形成目标对象的内部结构的显影图像,再由对目标对象内部结构十分熟悉的专业人员在两个显影图像中标记平面路径,并根据两个平面路径进行空间想象,确定植入期间的空间路径。但是,前述方法确定的空间路径依靠专业人员的经验和空间想象,并且基于前述经验和空间想象确定的空间路径不可准确复现。
技术实现思路
1、为了解决上述技术问题,本公开实施例提供一种确定空间路径的方法、装置、设备和介质。
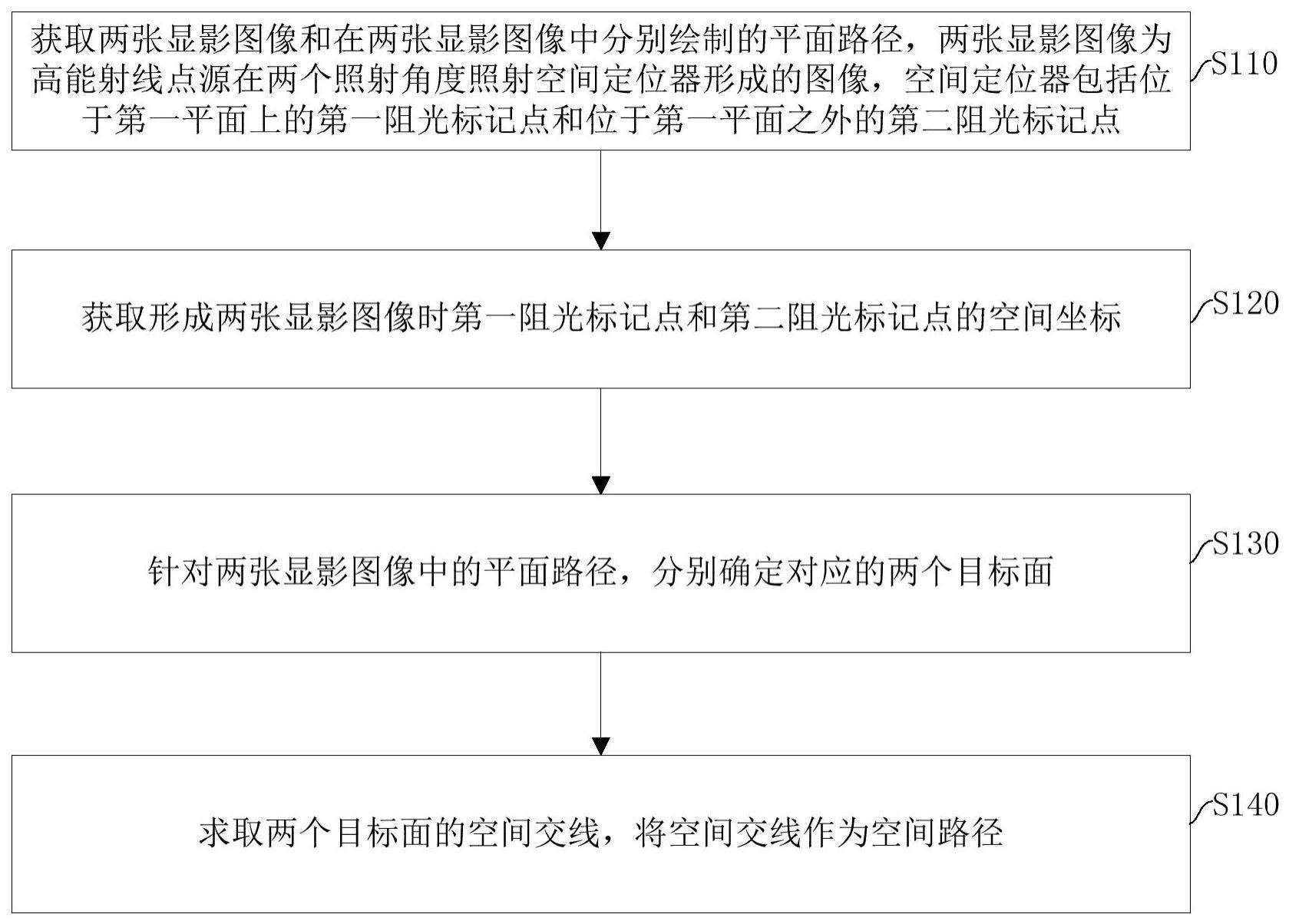
2、第一方面,本公开实施例提供一种确定空间路径的方法,包括:获取两张显影图像和在所述两张显影图像中分别绘制的平面路径,所述两张显影图像为高能射线点源在两个照射角度照射空间定位器形成的图像,所述空间定位器包括位于第一平面上的第一阻光标记点和位于第一平面之外的第二阻光标记点,所述第一阻光标记点的数量至少为四个,所述第二阻光标记点的数量至少为两个;
3、获取形成两张所述显影图像时所述第一阻光标记点和所述第二阻光标记点的空间坐标;
4、针对所述两张显影图像中的平面路径,分别执行如下a-e直至得到对应的两个目标面:
5、a,确定第一投影平面,并根据所述第一阻光标记点的空间坐标和在第一投影平面上的投影坐标确定坐标转换关系,所述第一投影平面与所述显影图像所在平面不平行;
6、b,基于所述第一阻光标记点在第一投影平面中投影点的平面坐标和在所述显影图像中投影点的平面坐标,确定所述第一投影平面和所述显影图像所在平面之间的单应矩阵;
7、c,基于所述第二阻光标记点的空间坐标、所述第二阻光标记点在所述显影图像中投影点的平面坐标、所述单应矩阵和所述坐标转换关系,确定所述点源的空间坐标;
8、d,基于所述平面路径的平面坐标、所述单应矩阵和所述坐标转换关系,确定所述平面路径在所述第一平面上的空间投影路径的空间坐标;
9、e,基于所述点源的空间坐标和所述空间投影路径确定所述目标面;
10、求取两个所述目标面的空间交线,将所述空间交线作为空间路径。
11、可选的,所述基于所述第二阻光标记点的空间坐标、所述第二阻光标记点在所述显影图像中投影点的平面坐标、所述单应矩阵和所述坐标转换关系,确定点源的空间坐标;,包括:
12、基于所述第二阻光标记点在显影图像中的投影点的平面坐标和所述单应矩阵,确定所述第二阻光标记点在所述第一投影平面上的第一投影点的平面坐标;
13、基于所述坐标转换关系,根据所述第一投影点的平面坐标确定所述第二阻光标记点在第一平面上的第二投影点的空间坐标;
14、根据所述第二阻光标记点的空间坐标和对应的所述第二投影点的空间坐标确定空间直线;
15、根据各个所述第二阻光标记点对应的空间直线,确定所述点源的空间坐标。
16、可选的,所述第二阻光标记点的数量至少为三个;
17、所述根据各个所述第二阻光标记点对应的空间直线,确定所述点源的空间坐标,包括:
18、采用最小二乘法,基于至少三条空间直线的交点确定所述点源的空间坐标。
19、可选的,所述基于所述平面路径的平面坐标、所述单应矩阵和所述坐标转换关系,确定所述平面路径在所述第一平面上的空间投影路径的空间坐标,包括:
20、基于所述平面路径的平面坐标和所述单应矩阵,确定所述平面路径在所述第一投影平面上的第一投影路径的平面坐标;
21、基于所述第一投影路径的平面坐标和所述坐标转换关系,确定所述空间投影路径的空间坐标;
22、可选的,所述平面路径为直线路径;所述基于所述平面路径的平面坐标和所述单应矩阵,确定所述平面路径在所述第一投影平面上的第一投影路径的平面坐标,包括:
23、获取所述平面路径的端点平面坐标;
24、根据所述端点平面坐标和所述单应矩阵,确定所述第一投影路径的平面坐标。
25、可选的,所述第一阻光标记点的数量至少为五个;所述基于所述第一阻光标记点在第一投影平面中投影点的平面坐标和在所述显影图像中投影点的平面坐标,确定所述第一投影平面和所述显影图像所在平面之间的单应矩阵,包括:
26、基于所述第一阻光标记点在所述第一平面中投影点的平面坐标和在所述显影图像中投影点的平面坐标,采用最小二乘法确定所述单应矩阵。
27、可选的,所述空间定位器还包括至少三个反光标记点,所述至少三个反光标记点与所述第一阻光标记点和所述第二阻光标记点的相对位置关系已知;
28、所述获取形成两张所述显影图像时所述第一阻光标记点和所述第二阻光标记点的空间坐标,包括:
29、在照射形成所述显影图像的同时,采用光学系统捕捉所述至少三个反光标记点的反光特征信息;
30、根据所述反光标记点的反光特征信息,确定所述至少三个反光标记点的空间坐标;
31、根据所述至少三个反光标记点的空间坐标和所述相位位置关系,确定所述第一阻光标记点和所述第二阻光标记点的空间坐标。
32、第二方面,本公开实施例提供一种确定空间路径的装置,包括:
33、数据获取单元,获取两张显影图像和在所述两张显影图像中分别绘制的平面路径,以及获取形成两张所述显影图像时所述第一阻光标记点和所述第二阻光标记点的空间坐标,所述两张显影图像为高能射线点源在两个照射角度照射空间定位器形成的图像,所述空间定位器包括位于第一平面上的第一阻光标记点和位于第一平面之外的第二阻光标记点,所述第一阻光标记点的数量至少为四个,所述第二阻光标记点的数量至少为两个;
34、目标面确定单元,用于针对所述两张显影图像中的平面路径确定对应的两个目标面;
35、空间路径确定单元,用于求取两个所述目标面的空间交线,将所述空间交线作为空间路径;其中,所述目标面确定单元包括:
36、坐标转换关系确定子单元,用于确定第一投影平面,并根据所述第一阻光标记点的空间坐标和在第一投影平面上的投影坐标确定坐标转换关系,所述第一投影平面与所述显影图像所在平面不平行;
37、单应矩阵计算子单元,基于所述第一阻光标记点在第一投影平面中投影点的平面坐标和在所述显影图像中投影点的平面坐标,确定所述第一投影平面和所述显影图像所在平面之间的单应矩阵;
38、点源空间坐标计算子单元,用于基于所述第二阻光标记点的空间坐标、所述第二阻光标记点在所述显影图像中投影点的平面坐标、所述单应矩阵和所述坐标转换关系,确定高能射线点源的空间坐标;
39、空间路径计算子单元,用于基于所述平面路径的平面坐标、所述单应矩阵和所述坐标转换关系,确定所述平面路径在所述第一平面上的空间投影路径的空间坐标;
40、目标面确定子单元,用于基于所述高能射线点源的空间坐标和所述空间投影路径确定所述目标面。
41、第三方面,本公开实施例提供一种空间定位器,包括本体、空间标记部、至少四个第一阻光标记点和至少两个第二阻光标记点;
42、所述空间标记部、所述第一阻光标记点和所述第二阻光标记点通过所述本体刚性连接,并且所述第一阻光标记点和所述第二阻光标记点与所述本体的相对位置关系确定;
43、所述空间标记部用于确定所述本体的空间坐标和位姿;
44、所述至少四个第一阻光标记点位于同一平面上,各个所述第二阻光标记点均位于所述平面之外。
45、第四方面,本公开实施例提供一种计算设备,包括处理器和存储器,所述存储器用于存储计算机程序;所述计算机程序在被所述处理器加载时,使所述处理器执行如前所述的确定空间路径的方法。
46、第五方面,本公开实施例提供一种计算机可读存储介质,所述存储介质存储有计算机程序,当计算机程序被处理器执行时,使得处理器实现如前所述的确定空间路径的方法。
47、本公开实施例提供的技术方案与现有技术相比具有如下优点:
48、本公开实施例提供地的方案,通过位于第一平面上的第一阻光标记点和位于第一平面之外的第二阻光标记点的空间坐标、在显影图像中的平面坐标,计算出两张显影图像对应的高能射线点源的空间坐标,以及计算出两张显影图像中的平面路径在第一平面上的空间投影路径的空间坐标,根据高能射线点源空间坐标和空间投影路径的空间坐标可以确定目标面。随后计算两个目标面相交的交线机可以得到空间路径。通过本公开实施例提供的方法,计算设备可以基于两个平面路径确定空间路径,使得空间路径可以准确复现,无需依靠依靠专业人员的经验和空间想象确定空间路径。
- 还没有人留言评论。精彩留言会获得点赞!