一种腔镜用直线型切割吻合器及吻合系统的制作方法
本发明涉及吻合器,尤其涉及一种腔镜用直线型切割吻合器及吻合系统。
背景技术:
1、吻合器是世界上首例缝合器,用于胃肠吻合已近一个世纪。一般分为一次性或多次使用的吻合器。它是医学上使用的替代传统手工缝合的设备,由于现代科技的发展和制作技术的改进,临床上使用的吻合器质量可靠,使用方便,其缝合快速、操作简便及很少有副作用和手术并发症等优点,主要工作原理是利用钛钉对组织进行离断或吻合,类似于订书机。
2、在使用吻合器进行夹持过程中,通常都是在组织内部进行操作,在组织内部进行夹持操作时,仅通过肉眼观察只能判断出被夹持的组织的夹持面积以及夹持的位置情况,对于夹持的力度以及被夹持的组织与吻合之间的牵引力不便于通过观察发现,以至于在夹持过程中出现被夹持组织的两侧夹持力度不统一以及被夹持组织与吻合器之间存在较大的牵引力的问题,导致组织缝合时的受力不均匀,从而会一定程度上影响缝合的质量。
技术实现思路
1、针对现有技术存在的不足,本发明通过对吻合头的吻合夹持力度进行多点位分析,能够在吻合过程中出现夹持偏差时及时调整,以解决现有的吻合头在吻合过程中的吻合力度监测不足导致吻合效果不够好的问题。
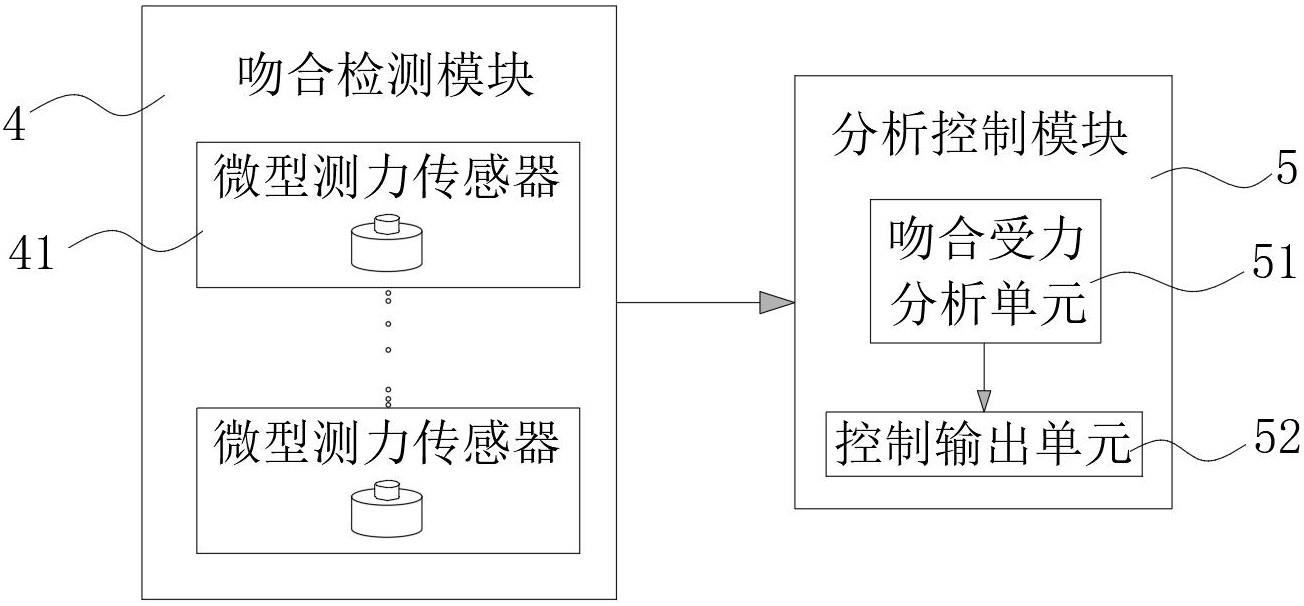
2、为了实现上述目的,本发明提供一种腔镜用直线型切割吻合系统,所述吻合系统包括吻合器,所述吻合器包括吻合头、连接杆以及控制手柄,所述吻合头设置在连接杆的一端,所述控制手柄设置在连接杆远离吻合头的一端,所述吻合头包括吻合钉座,所述吻合系统还包括分析控制模块以及吻合检测模块,所述分析控制模块设置在控制手柄内,所述吻合检测模块包括若干微型测力传感器;
3、所述吻合钉座包括第一吻合座和第二吻合座,所述第一吻合座和第二吻合座靠近连接杆的一端通过吻合调节机构转动连接,所述吻合调节机构用于调节第一吻合座和第二吻合座之间的夹角,所述吻合调节机构与连接杆连接处设置有角度调节机构,所述角度调节机构包括旋转调节组件以及角度调节组件,所述吻合调节机构与角度调节组件固定连接,所述角度调节组件与旋转调节组件固定连接,所述旋转调节组件的旋转中心在连接杆的中心轴线上,所述旋转调节组件用于带动角度调节组件沿连接杆的中心轴线进行转动,所述角度调节组件用于带动吻合调节机构进行转动,以调节吻合调节机构与连接杆之间夹角;
4、若干微型测力传感器设置有两组,两组微型测力传感器分别设置在第一吻合座和第二吻合座内;当第一吻合座和第二吻合座吻合时,两组微型测力传感器的位置相互对应;
5、所述分析控制模块包括吻合受力分析单元以及控制输出单元,所述吻合受力分析单元用于对两组微型测力传感器获取到的数据进行分析,得到吻合受力结果;所述控制输出单元用于基于吻合受力结果进行分析,得到吻合调节机构以及角度调节组件的调节参数,基于调节参数控制吻合调节机构以及角度调节组件进行调整。
6、进一步地,所述吻合检测模块配置有吻合检测配置策略,所述吻合检测配置策略包括:提取第一吻合座和第二吻合座的吻合面;
7、对吻合面设定吻合区域划定子策略,通过吻合区域划定子策略获取矩形配置区域;
8、将第一吻合座的吻合面设定为第一吻合面,将第二吻合座的吻合面设定为第二吻合面;通过吻合区域划定子策略分别获取第一吻合面和第二吻合面的矩形配置区域,分别设定为第一矩形配置区域和第二矩形配置区域;
9、在第一矩形配置区域和第二矩形配置区域的四个拐角处分别设定一个微型测力传感器。
10、进一步地,吻合区域划定子策略包括:提取吻合面的轮廓,将吻合面的轮廓通过若干方格进行划分,得到吻合划分参照网格;
11、在吻合划分参照网格上选取若干矩形框,计算若干矩形框内的网格数量,选取网格数量最多的矩形框作为矩形配置区域。
12、进一步地,所述吻合检测模块还配置有检测划分策略,所述检测划分策略包括:将第一矩形配置区域与第二矩形配置区域内的两个相对位置的微型测力传感器分别设置为一组方位传感器;
13、将四组方位传感器分别设定为第一组方位传感器、第二组方位传感器、第三组方位传感器以及第四组方位传感器;第一组方位传感器与第三组方位传感器处于第一矩形配置区域或第二矩形配置区域的对角线上,第二组方位传感器与第四组方位传感器处于第一矩形配置区域或第二矩形配置区域的另一条对角线上;
14、将第一组方位传感器、第二组方位传感器、第三组方位传感器以及第四组方位传感器中位于第一矩形配置区域内的微型测力传感器获取到的测力数值分别设定为l1c1、l1c2、l1c3以及l1c4;将第一组方位传感器、第二组方位传感器、第三组方位传感器以及第四组方位传感器中位于第二矩形配置区域内的微型测力传感器获取到的测力数值分别设定为l2c1、l2c2、l2c3以及l2c4。
15、进一步地,所述吻合受力分析单元配置有吻合受力分析策略,所述吻合受力分析策略包括:获取实时的l1c1、l1c2、l1c3、l1c4、l2c1、l2c2、l2c3以及l2c4,将实时获取到的l1c1、l1c2、l1c3、l1c4、l2c1、l2c2、l2c3以及l2c4通过受力波动计算公式计算得到受力总波动值;
16、当受力总波动值大于等于第一波动阈值时,设定第一受力比对子策略、第二受力比对子策略以及第三受力比对子策略;当受力总波动值小于第一波动阈值时,输出受力正常信号;
17、第一受力比对子策略用于计算第一吻合面与第二吻合面的相对面总差值;当相对面总差值大于等于第一相对面阈值时,执行第二受力比对子策略;当相对面总差值小于第一相对面阈值时,执行第三受力比对子策略;
18、第二受力比对子策略用于对四组方位传感器获取到的测力数值进行独立差值计算,得到组内受力差值;当组内受力差值大于等于第一组内差阈值时,输出方位倾斜信号;
19、第三受力比对子策略用于对四组方位传感器获取到的测力数值进行比对差值计算,得到组外受力差值;当组外受力差值大于等于第一组外差阈值时,输出夹持倾斜信号。
20、进一步地,第一受力比对子策略包括:将l1c1、l1c2、l1c3以及l1c4相加得到第一吻合受力总值,将l2c1、l2c2、l2c3以及l2c4相加得到第二吻合受力总值,求取第一吻合受力总值和第二吻合受力总值的差值的绝对值,设定为相对面总差值。
21、进一步地,第二受力比对子策略包括:依次求取l1c1与l2c1、l1c2与l2c2、l1c3与l2c3以及l1c4与l2c4之间的差值的绝对值,分别设定为第一点位差值、第二点位差值、第三点位差值以及第四点位差值;
22、将第一点位差值、第二点位差值、第三点位差值以及第四点位差值中的最大值设置为组内受力差值。
23、进一步地,第三受力比对子策略包括:依次将l1c1与l2c1相加、l1c2与l2c2相加、l1c3与l2c3相加以及l1c4与l2c4相加得到第一点位受力总值、第二点位受力总值、第三点位受力总值以及第四点位受力总值;
24、求取第一点位受力总值、第二点位受力总值、第三点位受力总值以及第四点位受力总值中的最大值与最小值的差值,设定为组外受力差值。
25、进一步地,所述控制输出单元配置有角度控制输出策略,所述角度控制输出策略包括:当接收到方位倾斜信号时,获取组内受力差值对应的点位差值,将点位差值对应的两组微型测力传感器设置为点位调整参考传感器;
26、将获取到的测力数值较大的点位调整参考传感器所在的位置设定为第一调整点位,将获取到的测力数值较小的点位调整参考传感器所在的位置设定为第二调整点位;
27、将第二调整点位朝向第一调整点位的方向设置为角度调整方向,将组内受力差值乘以角度转换系数得到调整角度,控制角度调节组件根据调整角度沿角度调整方向进行调整。
28、进一步地,所述控制输出单元还配置有吻合控制输出策略,所述吻合控制输出策略包括:当接收到夹持倾斜信号时,将组外受力差值乘以夹持调整系数得到夹持扩展角度;
29、通过吻合调节机构根据夹持扩展角度增大第一吻合座和第二吻合座之间的夹角。
30、本发明的有益效果:
31、1、本发明通过设置角度调节组件、旋转调节组件以及吻合调节机构,能够对吻合头在吻合过程中的方位以及吻合角度进行调整,提高调节的全面性。
32、2、本发明通过在第一吻合座和第二吻合座内分别设置一组微型测力传感器,当第一吻合座和第二吻合座吻合时,两组微型测力传感器的位置相互对应,该设计能够对第一吻合座和第二吻合座在吻合时多点位的吻合力度,从而便于进行精准地吻合调整。
33、3、本发明通过对两组微型测力传感器获取到的数据进行分析,得到吻合受力结果;再基于吻合受力结果进行分析,得到吻合调节机构以及角度调节组件的调节参数,基于调节参数控制吻合调节机构以及角度调节组件进行调整,该设计能够基于对多点位的吻合力度的分析结果,对吻合调节机构以及角度调节组件进行调整,有助于提高吻合位置的准确度以及吻合效果。
34、本发明附加方面的优点将在下面的具体实施方式的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!