一种下肢瘫痪患者智能辅助步行装置
本发明涉及医疗辅助装置,具体涉及一种下肢瘫痪患者智能辅助步行装置。
背景技术:
1、脑卒中具有高发病率、高死亡率、高复发率、高致残率,因此积极康复治疗不仅可以减轻家庭负担,也提高患者生活质量。目前康复的方法有很多,康复的器械也是各种各样,存在以下技术缺陷:患者在步行过程中经常因瘫痪导致足部不能完全抬起致足尖下垂与地面摩擦,这种情况经常致患者跌倒而引起擦伤、骨折、脑外伤等严重的后果;部分患者采用绳子牵引前脚掌或防足下垂固定架固定,从而避免行走中足下垂带来的危害,绳子牵引用力大小无法量化,全靠个人感觉;防足下垂固定支架固定后患者踝部活动不自如影响舒适性;以上方法对患者的舒适性和安全性均无法保障,且浪费人力。
2、因此,如何设计一种避免患者在步行过程中足下垂而引起的足尖拖地导致的跌倒,外伤的下肢瘫痪患者智能辅助步行装置,成为急需解决的问题。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种下肢瘫痪患者智能辅助步行装置,以解决上述至少一种技术问题。
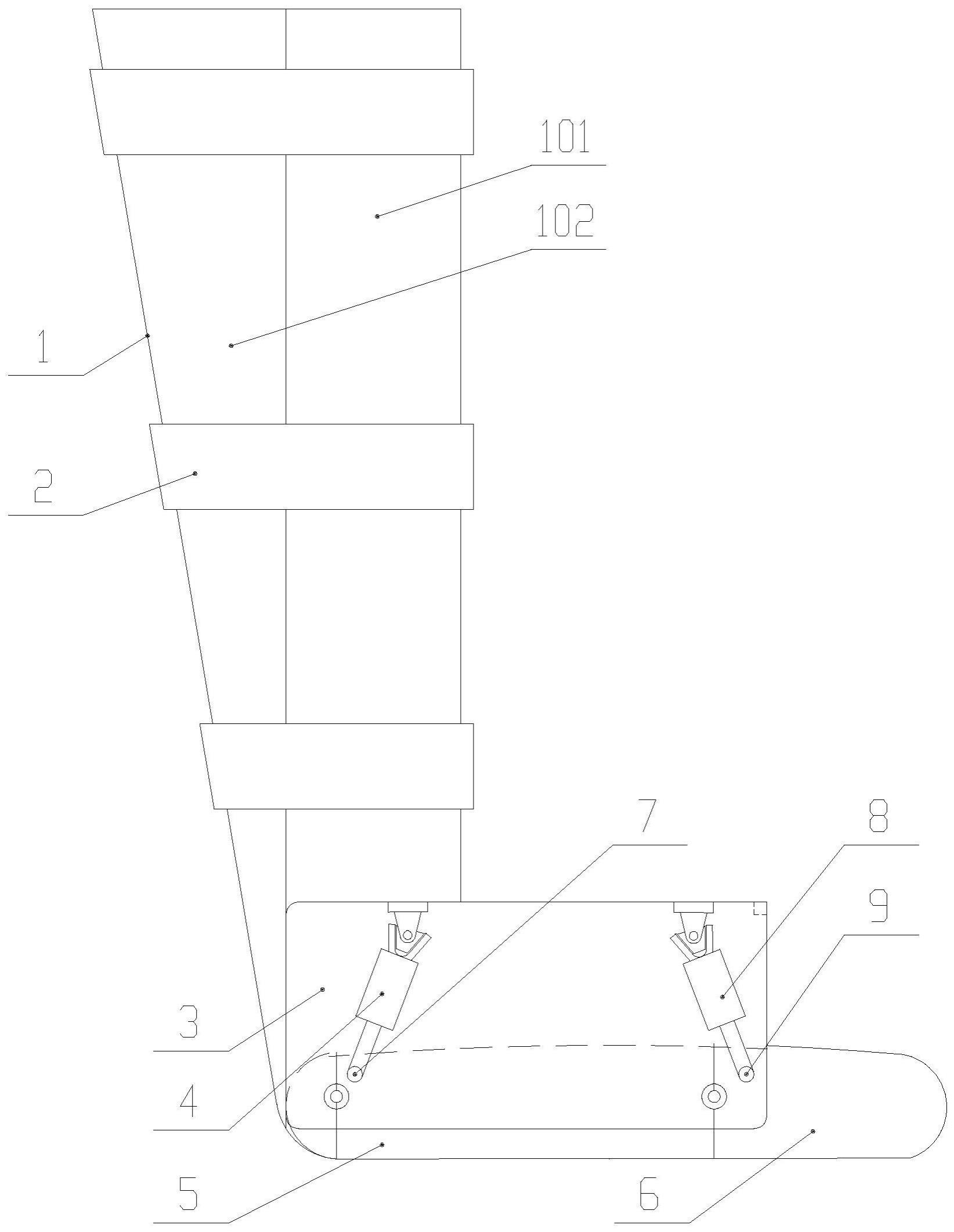
2、本发明的技术方案是:一种下肢瘫痪患者智能辅助步行装置,包括小腿固定器,所述小腿固定器通过数根间距布置的魔术贴绑扎在小腿上,小腿固定器的底部通过第一铰链连接脚跟固定器,脚跟固定器的前方通过第二铰链与前脚掌固定器连接,脚掌能踩在脚跟固定器及前脚掌固定器的顶面,脚跟固定器与脚跟的对应位置处设置有第一压力传感器,前脚掌固定器与脚趾的对应位置处设置有第二压力传感器、距离传感器,小腿固定器靠近脚踝的一侧设置有支架,支架的两侧远离脚掌的端面上设置有数个电动气缸,电动气缸的活塞端分别与脚跟固定器、前脚掌固定器连接;电动气缸、第一压力传感器、第二压力传感器、距离传感器均接入plc控制器。
3、本发明采用脚跟固定器与脚跟的对应位置处设置有第一压力传感器,前脚掌固定器与脚趾的对应位置处设置有第二压力传感器、距离传感器,电动气缸、第一压力传感器、第二压力传感器、距离传感器均接入plc控制器,plc控制器通过压力传感器的反馈值驱动电动气缸分别带动脚跟固定器、前脚掌固定器进行角度变化,能在患者行走过程中足尖抬高的程度智能纠正患者足下垂,实现了智能辅助行走,使患者更容易完成行走,提高康复的信心,同时也减轻患者家庭照顾者的负担;减轻社会负担;避免了患者在步行过程中足下垂而引起的足尖拖地导致的跌倒,外伤等技术缺陷,结构合理,佩戴方便,大大提高了患者在行走康复中的安全性,具有较好的可行性和实用性。
4、优选,所述小腿固定器包括固定部分,活动部分,其中固定部分沿着胫骨包裹,活动部分绕小腿三头肌包裹,魔术贴一端设置有毛面,毛面固定于固定部分,活动部分远离小腿的端面上设置有数个固定环组,任意一个固定环组内的固定环在同一个水平面上,魔术贴的另一端设置有勾面,勾面从对应的固定环组穿过后与毛面粘合。
5、本发明采用固定部分沿着胫骨包裹,活动部分绕小腿三头肌包裹,通过魔术贴将固定部分和活动部分连接为一体,患者踝部活动自如,不影响舒适性。
6、优选,所述电动气缸的固定端通过万向联轴器与支架的外侧面连接,电动气缸分别对应第一电动气缸、第二电动气缸,任意一个垂直面上的第一电动气缸与第二电动气缸成“八”字形布置,第一电动气缸、第二电动气缸的活塞上均设置有测力传感器。
7、本发明的电动气缸的固定端采用万向联轴器与支架连接,能适应牵拉过程中多角度的变化;在电动气缸的活塞上设测力传感器,能清楚牵引力的数值,解决了用绳子牵引,用力大小无法量化,全靠个人感觉的技术缺陷。
技术特征:
1.一种下肢瘫痪患者智能辅助步行装置,包括小腿固定器(1),其特征在于:所述小腿固定器(1)通过数根间距布置的魔术贴(2)绑扎在小腿上,小腿固定器(1)的底部通过第一铰链连接脚跟固定器(5),脚跟固定器(5)的前方通过第二铰链与前脚掌固定器(6)连接,脚掌能踩在脚跟固定器(5)及前脚掌固定器(6)的顶面,脚跟固定器(5)与脚跟的对应位置处设置有第一压力传感器,前脚掌固定器(6)与脚趾的对应位置处设置有第二压力传感器、距离传感器,小腿固定器(1)靠近脚踝的一侧设置有支架(3),支架(3)的两侧远离脚掌的端面上设置有数个电动气缸,电动气缸的活塞端分别与脚跟固定器(5)、前脚掌固定器(6)连接;电动气缸、第一压力传感器、第二压力传感器、距离传感器均接入plc控制器。
2.根据权利要求1所述的一种下肢瘫痪患者智能辅助步行装置,其特征在于:所述小腿固定器(1)包括固定部分(101),活动部分(102),其中固定部分(101)沿着胫骨包裹,活动部分(102)绕小腿三头肌包裹,魔术贴(2)一端设置有毛面,毛面固定于固定部分(101),活动部分(102)远离小腿的端面上设置有数个固定环组,任意一个固定环组内的固定环在同一个水平面上,魔术贴(2)的另一端设置有勾面,勾面从对应的固定环组穿过后与毛面粘合。
3.根据权利要求2所述的一种下肢瘫痪患者智能辅助步行装置,其特征在于:所述支架(3)为u型结构,u型结构的开口端与固定部分(101)的外圈连接,u型结构的闭合端位于支架(3)的顶面内侧。
4.根据权利要求2所述的一种下肢瘫痪患者智能辅助步行装置,其特征在于:所述电动气缸的固定端通过万向联轴器与支架(3)的外侧面连接,电动气缸分别对应第一电动气缸(4)、第二电动气缸(8),任意一个垂直面上的第一电动气缸(4)与第二电动气缸(8)成“八”字形布置,第一电动气缸(4)、第二电动气缸(8)的活塞上均设置有测力传感器。
5.根据权利要求4所述的一种下肢瘫痪患者智能辅助步行装置,其特征在于:所述脚跟固定器(5)上设置有第一销轴(7),第一销轴(7)沿着脚跟固定器(5)宽度方向贯穿,两个第一电动气缸(4)的活塞端分别与第一销轴(7)的两端连接。
6.根据权利要求5所述的一种下肢瘫痪患者智能辅助步行装置,其特征在于:所述前脚掌固定器(6)上设置有第二销轴(9),第二销轴(9)沿着前脚掌固定器(6)宽度方向贯穿,两个第二电动气缸(8)的活塞端分别与第二销轴(9)的两端连接。
7.根据权利要求5所述的一种下肢瘫痪患者智能辅助步行装置,其特征在于:还包括供电仓及控制箱,供电仓及控制箱放置在折叠拉杆车上,供电仓内设置有24v蓄电池,plc控制器位于控制箱内;小腿固定器(1)、脚跟固定器(5)及前脚掌固定器(6)均能放置在折叠拉杆车上。
8.根据权利要求7所述的一种下肢瘫痪患者智能辅助步行装置,其特征在于:所述plc控制器包括数据比较模块,第一压力传感器的压力值变化并发送信号到plc控制器,数据比较模块比较发现第一压力传感器的压力值为0,plc控制器驱动第一电动气缸(4)的活塞端及第二电动气缸(8)的活塞端缩回;第二压力传感器的压力值变化并发送信号到plc控制器,数据比较模块比较发现第二压力传感器的压力值为0,此时脚尖不接触地面,plc控制器启动距离传感器,plc控制器停止驱动第一电动气缸(4)的活塞端及第二电动气缸(8)的活塞端,第一电动气缸(4)及第二电动气缸(8)为持荷状态;距离传感器感应到离障碍或地面物距离较近时,发送信号到plc控制器,plc控制器驱动第二电动气缸(8)回缩,使脚尖抬高,防止脚尖和地面摩擦。
9.根据权利要求8所述的一种下肢瘫痪患者智能辅助步行装置,其特征在于:所述第一压力传感器的压力值变为恒定值并发送信号到plc控制器,数据比较模块比较发现第一压力传感器的恒定值与初始值在误差范围内,此时脚跟接触地面,plc控制器关闭距离传感器,plc控制器驱动第一电动气缸(4)的活塞端及第二电动气缸(8)的活塞端伸出。
10.根据权利要求9所述的一种下肢瘫痪患者智能辅助步行装置,其特征在于:所述小腿固定器(1)上设置有第一限位装置,当小腿固定器(1)垂直于脚跟固定器(5),第一限位装置发送信号到plc控制器,plc控制器停止驱动第一电动气缸(4)的活塞端,第一电动气缸(4)为持荷状态;脚跟固定器(5)上设置有第二限位装置,当脚跟固定器(5)及前脚掌固定器(6)恢复到水平状态,第二限位装置发送信号到plc控制器,plc控制器停止驱动第二电动气缸(8)的活塞端,第二电动气缸(8)为持荷状态。
技术总结
本发明提供了一种下肢瘫痪患者智能辅助步行装置,小腿固定器的底部通过第一铰链连接脚跟固定器,脚跟固定器的前方通过第二铰链与前脚掌固定器连接,脚掌能踩在脚跟固定器及前脚掌固定器的顶面,脚跟固定器与脚跟的对应位置处设置有第一压力传感器,前脚掌固定器与脚趾的对应位置处设置有第二压力传感器、距离传感器,小腿固定器靠近脚踝的一侧设置有支架,支架的两侧远离脚掌的端面上设置有数个电动气缸,电动气缸的活塞端分别与脚跟固定器、前脚掌固定器连接;电动气缸、压力传感器、距离传感器均接入PLC控制器。本发明能在患者行走过程中足尖抬高的程度智能纠正患者足下垂,实现了智能辅助行走,使患者更容易完成行走,提高康复的信心。
技术研发人员:李占肖,厉坤鹏,费丽,毕晓莹,吴品萱,柴会荣,毛晓薇,张凯丽,陆悦,刘燕,黄小玉,李颖
受保护的技术使用者:中国人民解放军海军军医大学第一附属医院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!