一种手术导航软件双目视觉结构光定位技术的制作方法
本发明涉及医疗器械领域,具体地说是一种手术导航软件双目视觉结构光定位技术。
背景技术:
1、当前手术导航软件的发展中,最突出的问题是对手术机器人和患者相互间的位置进行准确定位。当前的定位技术有磁定位,固定式支架定位,标记式视觉定位,无标式记视觉定位。其中磁定位需要事先放入磁性标记物,测量精度容易受到磁场的影响。固定式支架定位对患者不友好,不能灵活适应不同的手术体位需求。标记式视觉定位需要在人体置入位置稳定的视觉标记点,工作量大。无标式记视觉定位无需置入标记点,患者在做医学图像检查进行体位固定,并且以该体位保持到手术过程中,当前的无标式记视觉定位面临的问题是定位精度较小。
2、综上,现在需要一种能够多种手术体位通用的定位技术,并且要在尽可能增加患者舒适度的情况下,测量精度还要足够高且不易被干扰。
技术实现思路
1、本发明的目的在于提出一种手术导航软件双目视觉结构光定位技术,以解决现有定位技术容易受到磁场的影响、病人舒适性差、不能灵活适应不同的手术体位需求且定位过程工作量大的问题。
2、为实现上述目的,本发明提供以下技术方案:
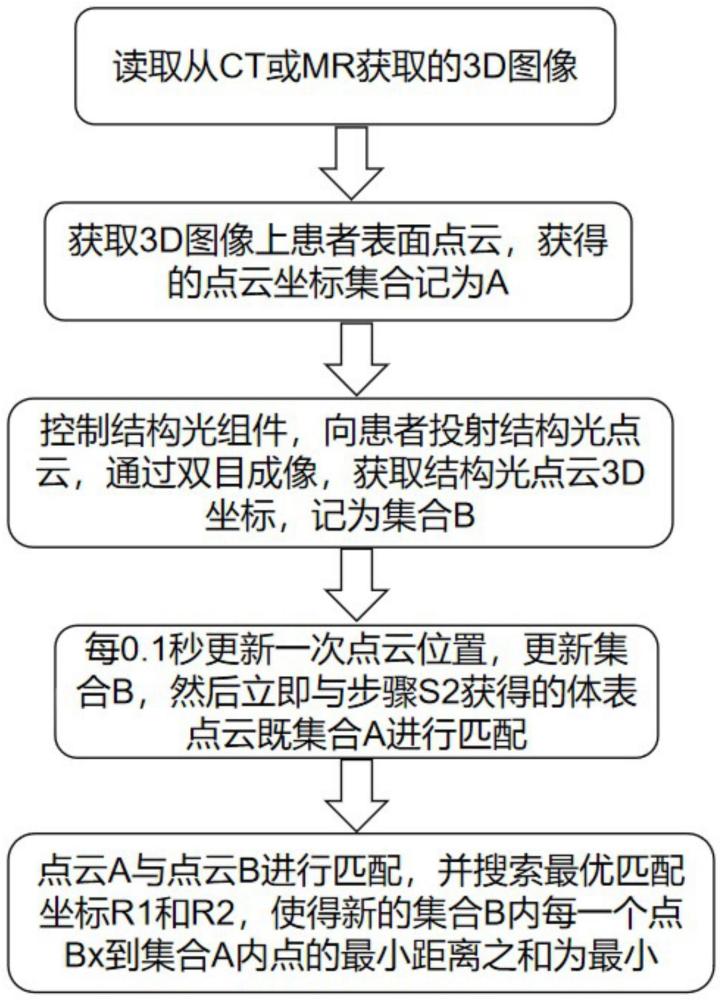
3、s1、读取从ct(计算机断层扫描成像)或mr(磁共振成像)获取的3d图像;
4、s2、获取3d图像上精细的患者表面点云,点云密度为10点每毫米,获得的点云坐标集合记为a;
5、s3、控制结构光组件,结构光组件由光源和遮光片组成,光线通过遮光片后会形成间隔均匀的光点,向患者投射结构光点云;通过双目成像,获取结构光点云所在位置的3d空间坐标,记该点云坐标集合为b;结构光组件投射的点云密度不小于2点每10mm;
6、s4、每0.1秒更新一次点云位置,更新后立即与步骤s2获得的体表点云进行匹配,从而判断患者体表发生了多大的位移;
7、s5、点云a与点云b进行匹配;
8、通过以上步骤,每0.1s更新患者3d图像与体表点云的相对位置,从而通过体表的形态来辅助机器人或医生定位里面器官的位置。
9、与现有技术相比,本发明有益效果如下:
10、本发明提供一种带结构光的,双目摄像头3d重建软件,对患者表面进行实时3d重建,计算得出患者表面点云。该点云与从ct或mr获得的患者3d图像进行匹配,从而获得患者在相对于摄像头的位置。
技术特征:
1.一种手术导航软件双目视觉结构光定位技术,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种手术导航软件双目视觉结构光定位技术,其特征在于,所述步骤s5中,点云a与点云b进行匹配具体包括以下内容:
技术总结
本发明提供了一种手术导航软件双目视觉结构光定位技术,其特征在于,包括以下步骤:S1、读取从CT或MR获取的3D图像;S2、获取3D图像上精细的患者表面点云,点云密度为10点每毫米,获得的点云坐标集合记为A;S3、控制结构光组件,向患者投射结构光点云;通过双目成像,获取结构光点云所在位置的3D空间坐标,记该点云坐标集合为B;结构光组件投射的点云密度不小于2点每10mm;S4、每0.1秒更新一次点云位置;S5、点云A与点云B进行匹配;通过以上步骤,每0.1S更新患者3D图像与体表点云的相对位置;本发明提供一种带结构光的,双目视觉3D重建软件,对患者表面实时3D重建,计算出患者表面点云;该点云与从CT或MR获得的患者3D图像进行匹配,从而获得患者在相对于摄像头的位置。
技术研发人员:陈志明,黄汉东,孔令岩
受保护的技术使用者:安隽医疗科技(南京)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!