一种穿刺手术机器人的精密主从控制系统及方法
本发明涉及机械手的程序控制系统领域,具体涉及一种穿刺手术机器人的精密主从控制系统及方法。
背景技术:
1、医护人员在操作主手执行穿刺手术时,通常希望主从动作跟随有着不同的映射比例,例如,在操作从端机器人的末端靠近患者时,需要较大的映射比例,以使得医生能够毫不费力地移动从端机器人的末端。
2、然而在操作从端机器人的末端瞄准病灶、执行穿刺或者电切时,需要较小的映射比例,以使得医生能够更高精度地移动从端机器人的末端,降低操作的难度和手抖的影响。
3、cn115338869a一种主从异构型遥操作系统的主从控制方法及系统公开了能够调整“主从映射系数”的技术方案,已“主从映射系数”的技术方案,以使得医生能够根据需要调整从端机器人的末端的运动幅度。
4、但是,在修改主从映射系数之后执行手术操作时有着自身的缺陷,主从映射系数与1之间的偏差越大,主端机器人和从端机器人之间的位姿偏差就越大,多个操作步骤之后,医生已经难以通过手感掌握从端机器人末端的位置和姿态,影响医生的操作。
5、并且,医生修改主从映射系数的过程中,需要放开主端机器人,然后通过鼠标、键盘或者旋钮操作手术工作台,这一过程中医生的胳膊容易误触主端机器人的末端,导致从端机器人的末端跟随动作,引起医疗事故。
技术实现思路
1、本发明的目的在于提供一种穿刺手术机器人的精密主从控制系统及方法,目的是为了使得从端机器人在自由空间中大范围快速移动,在执行手术作业时小范围精细运动。
2、为解决上述技术问题:
3、本申请提供一种穿刺手术机器人的精密主从控制系统,包括:
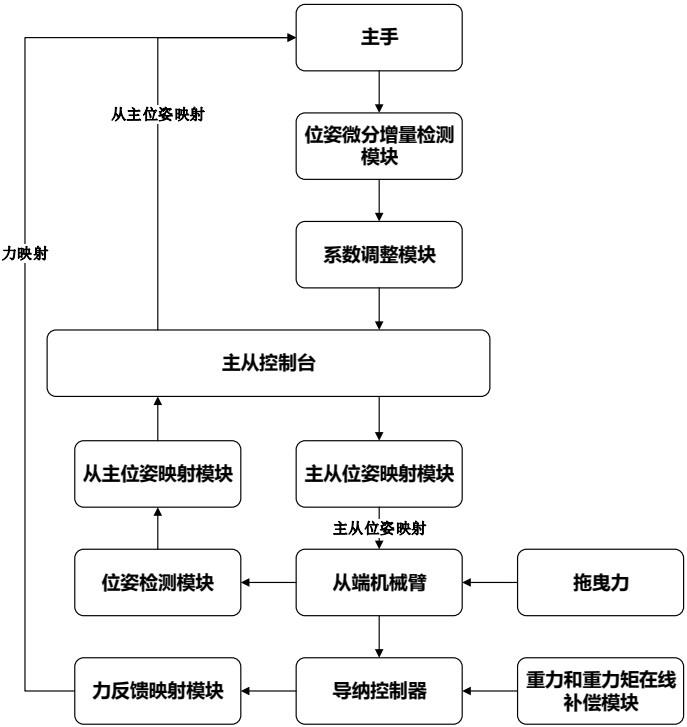
4、主从控制台,用于切换主端机器人与多个从端机器人中的任一者的主从动作跟随和从主位姿映射的连接;
5、主从动作跟随模块,用于获取主端机器人末端的笛卡尔空间速度和角速度,然后将获取的数据乘以主从跟随系数,映射至从端机器人的末端,使得从端机器人的末端跟随主端机器人的末端同步移动;
6、从主位姿映射模块,用于在主从动作跟随模块停止工作时,或者在主从控制台切换主端机器人与从端机器人的连接时,将从端机器人的位姿映射至主端机器人,以修正主端机器人的位姿和从端机器人的位姿之间的偏差;
7、其中,主从动作跟随模块内置有:系数调整模块;
8、系数调整模块用于供操作人员根据从端机器人的工况修改主从跟随系数,在自由空间中调大主从跟随系数,以实现从端机器人的大范围快速移动,在执行手术作业时调小主从跟随系数,以实现从端机器人的小范围精细运动;
9、系数调整模块包括至少一操作端,操作端安装在操作人员在操作主端机器人末端的同时能够接触的位置,操作端通过感受操作人员输出的作用力的变化以修改主从跟随系数,并且在主从跟随系数改变时向操作人员反馈线性变化的反向作用力,使得操作人员能够通过触觉感受主从跟随系数。
10、进一步的,系数调整模块包括:踏板和角度传感器;所述踏板用于被操作人员踩踏,所述角度传感器用于检测所述踏板被踩踏的力度或者被踩踏后的角位移;主从动作跟随模块根据踏板被踩踏的力度或者被踩踏后的角位移修改主从跟随系数,以使得操作人员能够通过踩踏踏板来实现从端机器人的大范围快速移动或者小范围精细运动。
11、进一步的,系数调整模块还包括:底板、铰链和弹性件;所述底板和所述踏板通过所述铰链转动连接,所述弹性件的两端分别连接所述底板和所述踏板,所述弹性件用于向所述踏板提供使其向上摆动的弹力。
12、进一步的,系数调整模块还包括:棘轮机构;所述棘轮机构安装在所述铰链上,所述棘轮机构用于限制所述铰链的旋转,以使得所述踏板只能单向向下摆动,并且所述踏板转动至最低角度时能够反向回转至最高角度。
13、另一方面,系数调整模块还包括:底板、铰链、电机和压力传感器;所述底板和所述踏板通过所述铰链转动连接,所述电机固定连接所述底板,所述电机的输出轴固定连接所述踏板,所述电机的输出轴与所述铰链的转轴同轴,所述压力传感器嵌入在所述踏板的被踩踏部位;所述踏板通过所述铰链转动时,所述电机通过向所述踏板转动的反方向输出转矩以向操作人员提供线性变化的反馈力。
14、进一步的,从主位姿映射模块包括:位姿检测模块,安装在主端机器人和从端机器人的关节,用于检测主端机器人和从端机器人的关节的角度,计算主端机器人末端和从端机器人末端的位姿;然后,通过从主位姿映射模块将从端机器人末端的位姿映射到主端机器人,完成从主位姿映射。
15、本申请还提供一种穿刺手术机器人的精密主从控制方法,使用上述精密主从控制系统,所述主从控制方法至少包括,
16、主从动作跟随:通过主从动作跟随模块获取主端机器人末端的笛卡尔空间速度和角速度,并且将获取的数据乘以主从跟随系数,映射至从端机器人的末端,操作人员根据从端机器人的工况修改主从跟随系数,在自由空间中调大主从跟随系数,以实现从端机器人的大范围快速移动,在执行手术作业时调小主从跟随系数,以实现从端机器人的小范围精细运动;
17、操作人员根据从端机器人的工况,向系数调整模块的操作端施加作用力以修改主从跟随系数,在自由空间中调大主从跟随系数,以实现从端机器人的大范围快速移动,在执行手术作业时调小主从跟随系数,以实现从端机器人的小范围精细运动。
18、进一步的,所述主从控制方法还包括,第一从主位姿映射:通过主从控制台切换主端机器人与多个从端机器人中的任一者的连接之后,通过从主位姿映射模块,将从端机器人的位姿映射至主端机器人,以修正主端机器人的位姿和从端机器人的位姿之间的偏差。
19、进一步的,所述主从控制方法还包括,第二从主位姿映射:执行主从跟随系数不等于1的主从动作跟随,并且操作人员释放主端机器人的末端之后,通过从主位姿映射模块,将从端机器人的位姿映射至主端机器人,以修正主端机器人的位姿和从端机器人的位姿之间的偏差。
20、进一步的,所述主从控制方法还包括,第三从主位姿映射:拖曳从端机器人的末端,通过从主位姿映射模块,将从端机器人的位姿映射至主端机器人,以修正主端机器人的位姿和从端机器人的位姿之间的偏差。
21、本申请与现有技术相比较具有如下有益效果:
22、提供一种穿刺手术机器人的精密主从控制系统及方法,通过主从动作跟随模块,将主端机器人末端的动作乘以主从跟随系数之后映射至从端机器人的末端,使得从端机器人能够在自由空间中大范围快速移动,并且在执行手术作业时小范围精细运动;还通过从主位姿映射模块在主从动作跟随模块停止工作时修正主端机器人的位姿和从端机器人的位姿之间的偏差,便于操作人员的后续操作。
技术特征:
1.一种穿刺手术机器人的精密主从控制系统,其特征在于,包括:
2.根据权利要求1所述的一种穿刺手术机器人的精密主从控制系统,其特征在于,
3.根据权利要求2所述的一种穿刺手术机器人的精密主从控制系统,其特征在于,
4.根据权利要求3所述的一种穿刺手术机器人的精密主从控制系统,其特征在于,
5.根据权利要求2所述的一种穿刺手术机器人的精密主从控制系统,其特征在于,
6.根据权利要求1-5中任一项所述的一种穿刺手术机器人的精密主从控制系统,其特征在于,
7.一种穿刺手术机器人的精密主从控制方法,其特征在于,
8.根据权利要求7所述的一种穿刺手术机器人的精密主从控制方法,其特征在于,
9.根据权利要求7所述的一种穿刺手术机器人的精密主从控制方法,其特征在于,
10.根据权利要求7所述的一种穿刺手术机器人的精密主从控制方法,其特征在于,
技术总结
本发明公开了一种穿刺手术机器人的精密主从控制系统及方法,包括主从控制台、主从动作跟随模块、从主位姿映射模块和系数调整模块,主从动作跟随模块使得从端机器人的末端跟随主端机器人的末端同步移动,从主位姿映射模块用于修正主端机器人的位姿和从端机器人的位姿之间的偏差,系数调整模块的操作端通过感受操作人员输出的作用力的变化以修改主从跟随系数,同时向操作人员反馈线性变化的反向作用力,使得操作人员能够通过触觉感受主从跟随系数,在自由空间中调大主从跟随系数,以实现从端机器人的大范围快速移动,在执行手术作业时调小主从跟随系数,以实现从端机器人的小范围精细运动。
技术研发人员:章小平,董为,吴志刚,张辉,张旭明,曹琪,梁华庚,史健
受保护的技术使用者:华中科技大学同济医学院附属协和医院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!