一种变刚度外骨骼康复机器人系统
本发明涉及一种机器人系统,更具体的说是涉及一种变刚度外骨骼康复机器人系统。
背景技术:
1、镜像疗法是一种主要用于脑卒中后上肢运动功能康复的一种表象训练,它在视觉刺激基础上应用躯体感觉输入来辅助运动功能恢复,其对偏瘫患者具有较好的临床疗效。镜像疗法中患者独立或辅助下进行双侧对称运动训练,镜像视觉反馈能够易化患侧部分神经运动通路,促进肢体运动功能恢复。
2、外骨骼康复机器人是机器人技术与康复医学结合的产物,它可以代替康复治疗师辅助患者进行运动训练,降低人工成本;同时,外骨骼康复机器人可反馈患者运动训练信息用于康复监测和评估,提高训练的科学性和规范性。
3、在机器人辅助双侧对称运动训练中,外骨骼机器人帮助患侧上肢模仿健侧的运动,两侧肢体同步完成目标任务;为达到两侧肢体运动的自然协调,机器人系统需要能够实时感知健侧关节的转动角度和刚度,并以此为指导完成外骨骼的位置和刚度协同控制。现有可用于偏瘫患者肘关节镜像疗法的外骨骼康复机器人系统一般无法感知健侧关节的刚度变化并实现变刚度控制,导致康复训练效果有待进一步提高。现有变刚度机器人系统体积、重量较大,导致外骨骼便携性和穿戴体验差等问题,如专利号为202111436452.0,名称为一种用于机器人关节的变刚度驱动系统的发明专利所公开的那样。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种用于偏瘫患者肘关节镜像疗法的变刚度外骨骼康复机器人系统,实时感知偏瘫患者健侧肘关节的转动角度和刚度,并通过运动和刚度协同控制使外骨骼复现健侧肘关节的运动,实现对患侧肘关节的辅助,完成镜像疗法中双侧肘关节的对称运动训练。
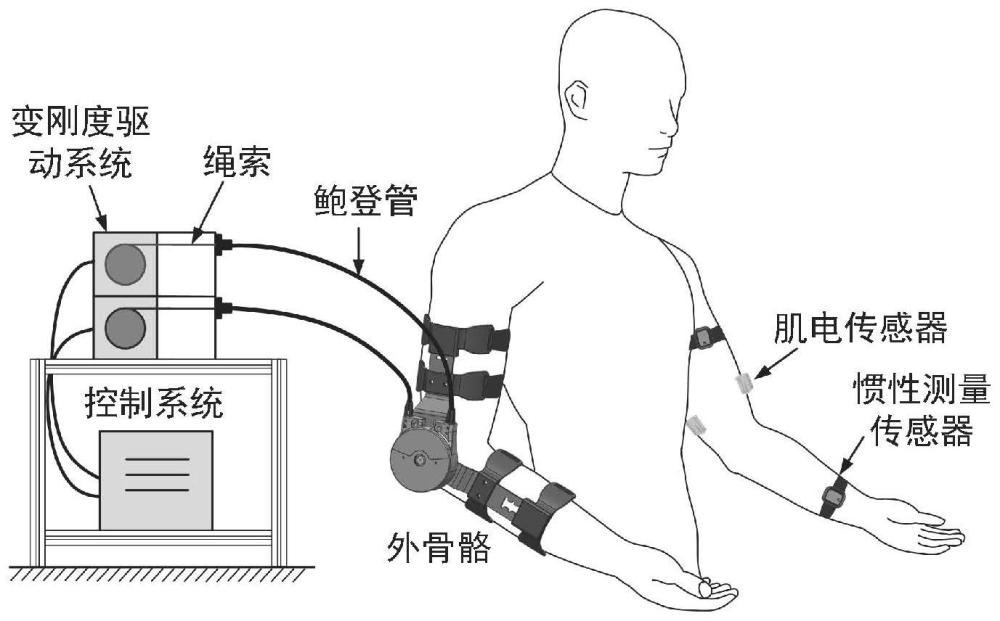
2、为实现上述目的,本发明提供了如下技术方案:一种变刚度外骨骼康复机器人系统,其特征在于:包括:
3、肌电传感器,贴合在患者健侧的肱二头肌和肱三头肌位置处,用于采集健侧上肢的肌电信号;
4、两个惯性测量传感器,两个传感器分别绑带于健侧上肢上臂和前臂,用于测量肘关节的转动角度;
5、外骨骼关节,该外骨骼关节通过绑带穿戴在患侧上肢,用于通过外骨骼关节转动带动患侧肘关节运动;
6、控制系统,该控制系统与肌电传感器和两个惯性测量传感器连接,以基于上肢肘关节刚度的估计结果和肘关节的转动角度输出控制信号;
7、变刚度驱动系统,该变刚度驱动系统与控制系统连接,还通过绳索和鲍登管与外骨骼关节连接,以接收控制系统输出的控制信号,并通过控制信号产生驱动力,驱动力通过绳索和鲍登管远程传递至外骨骼关节。
8、作为本发明的进一步改进,所述变刚度驱动系统包括:
9、两个电机,与控制系统连接,接收控制信号后转动;
10、两个变刚度机构,该变刚度机构由弹簧、变刚绳索、输入法兰、输出法兰、蜗轮、蜗杆、卷轮和卷轮滑轮以及若干个滑轮组成,输入法兰与电机的转轴连接,绳索卷绕在卷轮上,卷轮与输出法兰连接,蜗轮和若干个滑轮可旋转的安装在输入法兰和输出法兰上,弹簧的一端固定在输出法兰上,另一端与变刚绳索连接,卷轮滑轮同轴固定在蜗轮上,所述变刚绳索背向弹簧的一端绕过各个滑轮后固定在卷轮滑轮上,所述蜗杆可旋转的安装在输出法兰靠近蜗轮的位置上,并与蜗轮啮合。
11、作为本发明的进一步改进,所述控制信号包括电机的转动角度,该电机的转动角度通过以下公式计算得出:
12、
13、
14、式中,θmotor,1和θmotor,2为两个变刚度机构中电机转动角度,θexo为外骨骼关节转动角度,rexo为传动比,ζ1和ζ2是方程系数,kexo为外骨骼关节刚度。作为本发明的进一步改进,所述电机转动角度的计算公式通过以下步骤得出:步骤一,通过改变变刚度机构中绳索预紧力,变刚度机构可表现出二次扭矩-挠度关系:
15、
16、其中,τvsm是变刚度机构输出扭矩,θvsm是变刚度关节挠度,ζ1和ζ2是方程系数;
17、步骤二,计算变刚度驱动系统中每个单元所施加的扭矩与外骨骼关节力矩的关系为:
18、τexo=rexo(τvsm,1(θvsm,1)-τvsm,2(θvsm,2)) (2)
19、其中,τexo为外骨骼关节力矩,rexo为传动比;
20、步骤三,计算两个单元中变刚度机构的挠度与电机转动角度以及外骨骼关节角度之间的关系为:
21、θvsm,1=rexoθexo+θmotor,1
22、θvsm,2=-rexoθexo-θmotor,2 (3)
23、其中,θexo为外骨骼关节转动角度,θmotor,1和θmotor,2为两个单元中电机转动角度;
24、当外骨骼不受外力作用时,θvsm,1和θvsm,2为0,外骨骼关节角度只与电机转动角度有关,其表达式为:
25、
26、步骤四,将公式(1)和(3)代入公式(2),并对公式(2)进行微分,可得外骨骼关节刚度表达式:
27、
28、步骤五,根据公式(4)和(5),电机转动角度可以写成关节外骨骼关节转动角度与刚度的表达式:
29、
30、
31、得到电机转动角度的计算公式。
32、作为本发明的进一步改进,所述上肢肘关节刚度的估计结果通过以下公式计算得出:
33、khum=d1kstmi+d0
34、式中,khum为肘关节刚度,kstmi为肘关节力矩,d1和d0为函数系数。
35、作为本发明的进一步改进,所述肘关节刚度计算公式通过以下步骤得出:
36、步骤1,使用截止频率为950hz的低通滤波器、截止频率为750hz的高通滤波器和全波整流器对传感器采集到的原始肌电信号进行滤波,滤波后的肌电信号进行线性归一化:
37、
38、其中,v(t)为滤波后肌电信号,max(|v(t)|)表示最大绝对肌电信号值。
39、获取肌肉活动度:
40、
41、其中,a表示非线性因子;
42、步骤2,根据肌肉活动度获取肌肉肌力:
43、fm=fce(l)am(t)fm.max+fpe(l)fm.max (9)
44、式(9)中,
45、
46、fpe(l)=e10l-15 (11)
47、表示肌肉中主动收缩元与被动弹性元的力-长度关系,fm.max表示肌肉最大肌力;式(9)-(11)中,l表示标准化肌肉长度,它是一个关于肘关节转动角度的函数:
48、
49、其中,c0、c1和c2表示函数系数,θhum表示肘关节角度,lm,0表示肌肉最大肌力下肌肉长度;
50、步骤3,根据肌肉肌力可得单个肌肉对肘关节的贡献力矩:
51、τi=fm,iri (13)
52、其中,ri表示力臂长度;
53、步骤4,获得所有相关肌肉对肘关节的力矩贡献为:
54、
55、其中,ag表示主动肌,an表示拮抗肌;
56、步骤5,获得肘关节力矩和刚度间的映射因子为:
57、
58、步骤6,最终肘关节刚度表示为:
59、khum=d1kstmi+d0 (16)
60、得到肘关节刚度计算公式。
61、本发明的有益效果:
62、1、本发明中外骨骼康复机器人由变刚度驱动系统驱动,通过控制系统中两个驱动电机的转动位置可实现外骨骼关节位置和刚度的同时控制。
63、2、本发明中外骨骼康复机器人使用绳索传递力,使得变刚度驱动系统布置灵活,可远离外骨骼本体安装,实现外骨骼的轻量化和紧凑设计。
64、3、本发明中外骨骼本体上不安装任何传感器,减小外骨骼的重量和制作成本。
65、4、本发明外骨骼康复机器人具有关节转动角度和力矩自反馈功能,在外骨骼本体上不安装任何传感器的情况下,根据公式(2)和(3),通过测量变刚度驱动系统中变刚度机构的挠度与电机转动角度,获得外骨骼关节转动角度和力矩。
66、5、本发明外骨骼康复机器人系统可实时测量患者健侧肘关节的转动角度和刚度,并且外骨骼康复机器人可实时模拟健侧肘关节的转动角度和刚度,为患者患侧肘关节提供帮助,实现机器人辅助镜像疗法。
- 还没有人留言评论。精彩留言会获得点赞!