一种用于远程手术机器人的旋转驱动装置
本发明涉及手术机器人,具体为一种用于远程手术机器人的旋转驱动装置。
背景技术:
1、在现代医疗领域,手术机器人已经成为一种广泛应用的工具,用于进行微创手术和远程手术。现有的远程手术机器人通常使用由多个关节组成的机械臂,这些关节通过旋转驱动装置进行控制。尽管这些机器人在医疗手术中具有巨大的潜力,但仍然存在一些使用缺陷:1、转动自由度有限:现有机械臂中,两个关节之间只能在一个旋转平面内转动,使转动自由度受限,这意味着它们无法覆盖部分特殊手术场景所需的广泛范围。手术医生的操作灵活性受到机械臂转动受限的限制,导致手术的复杂性和难度增加。2、占用大量空间:多关节机械臂的设计通常占用大量的手术室空间,对手术操作的环境和灵活性造成限制,也增加了设备的成本,在手术过程中需要为机械臂留出足够的活动范围,使助理医生无法靠近病人,不能第一时间应对出现的意外状况,增加手术风险。
技术实现思路
1、针对上述存在的技术不足,本发明的目的是提供一种用于远程手术机器人的旋转驱动装置,为远程手术机器人提供更大的自由度,减小其体积,提高手术机器人的操作性和适用性。
2、为实现上述目的,本发明采用如下技术方案:
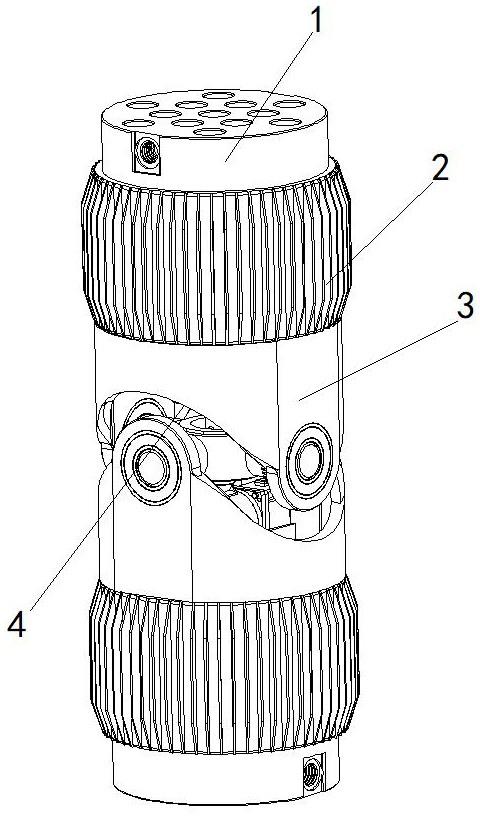
3、一种用于远程手术机器人的旋转驱动装置,包括十字轴、两个缓冲单元和两个驱动单元;两个缓冲单元、两个驱动单元分别上下相对设置,十字轴设置在两个驱动单元之间;驱动单元包括基座、偏转驱动组件、连接座和旋转驱动组件;偏转驱动组件固定在基座的内部,旋转驱动组件固定在连接座的内部;连接座可转动的设置在基座上远离十字轴的一端;旋转驱动组件与基座传动连接,带动连接座以基座的轴线为中心进行旋转;十字轴包括第一轴杆和第二轴杆;第一轴杆和第二轴杆相互垂直设置;上部的基座与第一轴杆枢转连接,下部的基座与第二轴杆枢转连接;上部的旋转驱动组件与第一轴杆传动连接,带动上部的基座以第一轴杆的轴线为中心进行旋转;下部的旋转驱动组件与第二轴杆传动连接,带动下部的基座以第二轴杆的轴线为中心进行旋转;缓冲单元的一端与基座铰接连接,另一端与十字轴铰接连接,用于基座旋转时减震缓冲。
4、优选地,所述偏转驱动组件包括支架、第一电机、减速器、主动轴、从动轴、主动齿轮、从动齿轮、传动齿轮;第一电机、支架固定在基座上;减速器与第一电机固定连接;主动轴、从动轴可转动的置于支架上;减速器的两端分别连接第一电机和主动轴;主动齿轮套接在主动轴上;从动齿轮、传动齿轮套接在从动轴上;主动齿轮与从动齿轮啮合传动;所述第一轴杆、第二轴杆上均套接有轴杆齿轮;上部的驱动单元的传动齿轮与第一轴杆上的轴杆齿轮啮合传动;下部的驱动单元的传动齿轮与第二轴杆上的轴杆齿轮啮合传动。
5、优选地,所述旋转驱动组件包括第二电机、齿圈、第一旋转齿轮和多个第二旋转齿轮;齿圈固定在连接座的内部;第二旋转齿轮可转动的设置在连接座上并与齿圈啮合传动;多个第二旋转齿轮以齿圈的轴线为中心呈圆周阵列分布;第二电机与所述基座固定连接;第一旋转齿轮固定在第二电机的输出轴上并与第一旋转齿轮啮合传动。
6、优选地,所述缓冲单元包括第一撑杆、上套筒、内弹簧、下套筒、外弹簧和第二撑杆;下套筒可活动的插接在上套筒内;内弹簧置于下套筒内,上端与上套筒固定连接,下端与下套筒固定连接;第一撑杆贯穿上套筒并与上套筒固定连接,第一撑杆铰接在所述十字轴上;第二撑杆贯穿下套筒并与下套筒固定连接,第二撑杆铰接在所述第一电机上;外弹簧的一端与上套筒固定连接,另一端与十字轴固定连接;外弹簧配置有两个,以上套筒的轴线为中心对称布置在上套筒的两侧。
7、优选地,所述十字轴还包括连接环;所述第一轴杆、第二轴杆和连接环一体连接;连接环的内部设置有贯通孔;贯通孔的轴线穿过第一轴杆的轴线和第二轴杆的轴线;所述第一撑杆铰接在连接环上。
8、优选地,所述缓冲单元还包括安装环;所述安装环置于所述连接环的贯通孔内,并与连接环螺纹连接设置;所述第一轴杆铰接在安装环上。
9、优选地,上部的所述基座上设置有容纳所述第二轴杆活动的弧形开口;下部的基座上设置有容纳所述第一轴杆活动的弧形开口。
10、优选地,所述基座上远离所述十字轴的一端一体设置有t形连接台;所述第二电机固定在t形连接台上;所述连接座的内部设置有容纳t形连接台的连接槽,t形连接台可转动的安装在连接槽内。
11、优选地,所述连接座的外壁上一体设置有散热翅片。
12、优选地,所述连接座上远离所述基座的一端一体设置有连接插头。
13、与现有技术相比,本发明的有益效果如下:
14、本发明的旋转驱动装置采用紧凑的结构设计,可以有效减小机械臂的尺寸,降低了手术机器人的空间占用;
15、通过第二电机带动连接座在基座上以连接座的轴线为中心进行转动,通过第一电机带动基座以第一轴杆或者第二轴杆的轴线为中心进行转动,提供更大的旋转自由度,使手术机器人的机械臂可以在更广泛的范围内进行运动;更高的旋转自由度,使医生可以在远程位置进行灵活的手术操作,提高了手术机器人的适用性;
16、紧凑的结构使装置的占用空间更小,使手术室内的辅助人员在手术床边离患者的位置更近,便于观察手术状况,出发情况时能够第一时间进行紧急处理,具备高度的安全性,能够确保手术操作的准确性和稳定性。
技术特征:
1.一种用于远程手术机器人的旋转驱动装置,其特征在于,包括十字轴(6)、两个缓冲单元(7)和两个驱动单元;两个缓冲单元(7)、两个驱动单元分别上下相对设置,十字轴(6)设置在两个驱动单元之间;驱动单元包括基座(3)、偏转驱动组件(8)、连接座(2)和旋转驱动组件(5);偏转驱动组件(8)固定在基座(3)的内部,旋转驱动组件(5)固定在连接座(2)的内部;连接座(2)可转动的设置在基座(3)上远离十字轴(6)的一端;旋转驱动组件(5)与基座(3)传动连接,带动连接座(2)以基座(3)的轴线为中心进行旋转;十字轴(6)包括第一轴杆(64)和第二轴杆(61);第一轴杆(64)和第二轴杆(61)相互垂直设置;上部的基座(3)与第一轴杆(64)枢转连接,下部的基座(3)与第二轴杆(61)枢转连接;上部的旋转驱动组件(5)与第一轴杆(64)传动连接,带动上部的基座(3)以第一轴杆(64)的轴线为中心进行旋转;下部的旋转驱动组件(5)与第二轴杆(61)传动连接,带动下部的基座(3)以第二轴杆(61)的轴线为中心进行旋转;缓冲单元(7)的一端与基座(3)铰接连接,另一端与十字轴(6)铰接连接,用于基座(3)旋转时减震缓冲。
2.如权利要求1所述的一种用于远程手术机器人的旋转驱动装置,其特征在于,所述偏转驱动组件(8)包括支架(81)、第一电机(87)、减速器(86)、主动轴(82)、从动轴(83)、主动齿轮、从动齿轮(84)、传动齿轮(85);第一电机(87)、支架(81)固定在基座(3)上;减速器(86)与第一电机(87)固定连接;主动轴(82)、从动轴(83)可转动的置于支架(81)上;减速器(86)的两端分别连接第一电机(87)和主动轴(82);主动齿轮套接在主动轴(82)上;从动齿轮(84)、传动齿轮(85)套接在从动轴(83)上;主动齿轮与从动齿轮(84)啮合传动;所述第一轴杆(64)、第二轴杆(61)上均套接有轴杆齿轮(62);上部的驱动单元的传动齿轮(85)与第一轴杆(64)上的轴杆齿轮(62)啮合传动;下部的驱动单元的传动齿轮(85)与第二轴杆(61)上的轴杆齿轮(62)啮合传动。
3.如权利要求1所述的一种用于远程手术机器人的旋转驱动装置,其特征在于,所述旋转驱动组件(5)包括第二电机(51)、齿圈(54)、第一旋转齿轮(52)和多个第二旋转齿轮(53);齿圈(54)固定在连接座(2)的内部;第二旋转齿轮(53)可转动的设置在连接座(2)上并与齿圈(54)啮合传动;多个第二旋转齿轮(53)以齿圈(54)的轴线为中心呈圆周阵列分布;第二电机(51)与所述基座(3)固定连接;第一旋转齿轮(52)固定在第二电机(51)的输出轴上并与第一旋转齿轮(52)啮合传动。
4.如权利要求2所述的一种用于远程手术机器人的旋转驱动装置,其特征在于,所述缓冲单元(7)包括第一撑杆(74)、上套筒(75)、内弹簧(77)、下套筒(73)、外弹簧(76)和第二撑杆(72);下套筒(73)可活动的插接在上套筒(75)内;内弹簧(77)置于下套筒(73)内,上端与上套筒(75)固定连接,下端与下套筒(73)固定连接;第一撑杆(74)贯穿上套筒(75)并与上套筒(75)固定连接,第一撑杆(74)铰接在所述十字轴(6)上;第二撑杆(72)贯穿下套筒(73)并与下套筒(73)固定连接,第二撑杆(72)铰接在所述第一电机(87)上;外弹簧(76)的一端与上套筒(75)固定连接,另一端与十字轴(6)固定连接;外弹簧(76)配置有两个,以上套筒(75)的轴线为中心对称布置在上套筒(75)的两侧。
5.如权利要求4所述的一种用于远程手术机器人的旋转驱动装置,其特征在于,所述十字轴(6)还包括连接环(63);所述第一轴杆(64)、第二轴杆(61)和连接环(63)一体连接;连接环(63)的内部设置有贯通孔;贯通孔的轴线穿过第一轴杆(64)的轴线和第二轴杆(61)的轴线;所述第一撑杆(74)铰接在连接环(63)上。
6.如权利要求5所述的一种用于远程手术机器人的旋转驱动装置,其特征在于,所述缓冲单元(7)还包括安装环(71);所述安装环(71)置于所述连接环(63)的贯通孔内,并与连接环(63)螺纹连接设置;所述第一轴杆(64)铰接在安装环(71)上。
7.如权利要求1所述的一种用于远程手术机器人的旋转驱动装置,其特征在于,上部的所述基座(3)上设置有容纳所述第二轴杆(61)活动的弧形开口(4);下部的基座(3)上设置有容纳所述第一轴杆(64)活动的弧形开口(4)。
8.如权利要求3所述的一种用于远程手术机器人的旋转驱动装置,其特征在于,所述基座(3)上远离所述十字轴(6)的一端一体设置有t形连接台(31);所述第二电机(51)固定在t形连接台(31)上;所述连接座(2)的内部设置有容纳t形连接台(31)的连接槽,t形连接台(31)可转动的安装在连接槽内。
9.如权利要求1至8中任一所述的一种用于远程手术机器人的旋转驱动装置,其特征在于,所述连接座(2)的外壁上一体设置有散热翅片(21)。
10.如权利要求9所述的一种用于远程手术机器人的旋转驱动装置,其特征在于,所述连接座(2)上远离所述基座(3)的一端一体设置有连接插头(1)。
技术总结
本发明提供了一种用于远程手术机器人的旋转驱动装置,包括十字轴、两个缓冲单元和两个驱动单元;两个缓冲单元、两个驱动单元分别上下相对设置,十字轴设置在两个驱动单元之间;驱动单元包括基座、偏转驱动组件、连接座和旋转驱动组件;本发明采用紧凑的结构设计,可以有效减小机械臂的尺寸,降低了手术机器人的空间占用;提供更大的旋转自由度,使手术机器人的机械臂可以在更广泛的范围内进行运动;更高的旋转自由度,提高了手术机器人的适用性;使手术室内的辅助人员在手术床边离患者的位置更近,便于观察手术状况,出发情况时能够第一时间进行紧急处理,具备高度的安全性,能够确保手术操作的准确性和稳定性。
技术研发人员:李和平
受保护的技术使用者:南方医科大学南方医院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!