基于毫米波雷达的多功能健康监测方法与流程
本发明涉及雷达监测,尤其涉及一种基于毫米波雷达的多功能健康监测方法、系统及计算机可读存储介质。
背景技术:
1、随着人口老龄化的趋势,老人的健康和日常照护也越来越重要,健康监测、老人意外跌倒、老人独自外出等情况就需要大量的人力物力来支撑,现在市面上涌现了很多穿戴式和非穿戴式设备来监测老人健康、跌倒和外出等状况。
2、穿戴式设备通常以腕带、手环为主。这些穿戴式设备通常存在佩戴体验不舒适、及无法全天候监测的问题。
3、而非穿戴式设备通常以摄像头、雷达为主。其中,摄像头方案的问题在于监测时需要实时拍摄用户活动,容易存在侵犯隐私的问题。雷达方案的问题在于通常只能做跌倒检测、人数检测等多种监测功能中的一种功能,导致其在实际日常照护中存在较多的局限性。
技术实现思路
1、本技术实施例通过提供一种基于毫米波雷达的多功能健康监测方法,旨在实现全天候、无接触且无隐私侵犯的多功能监测。
2、为实现上述目的,本技术实施例提供了一种基于毫米波雷达的多功能健康监测方法,包括:
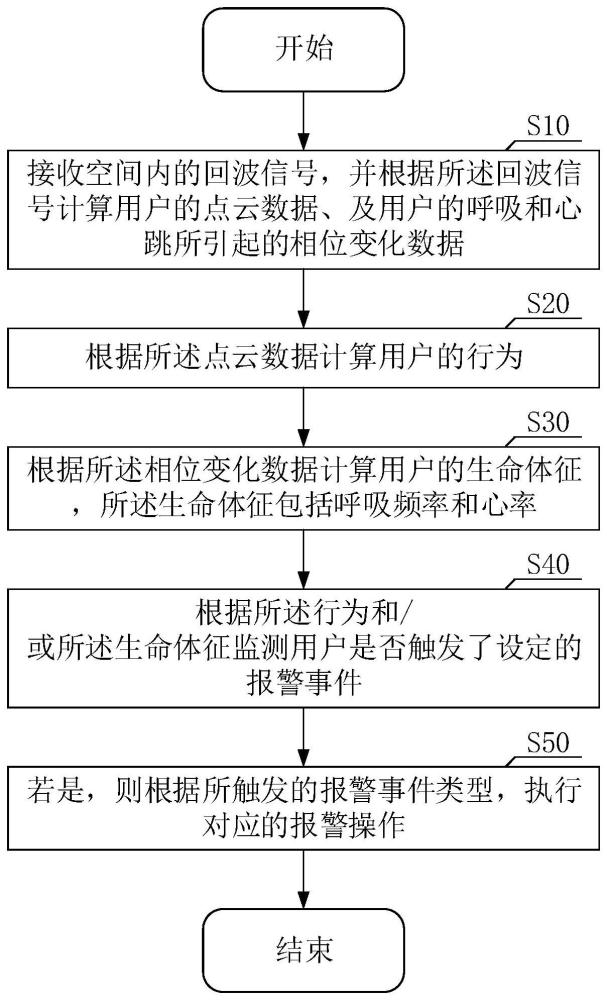
3、接收空间内的回波信号,并根据所述回波信号计算用户的点云数据、及用户的呼吸和心跳所引起的相位变化数据;
4、根据所述点云数据计算用户的行为;
5、根据所述相位变化数据计算用户的生命体征,所述生命体征包括呼吸频率和心率;
6、根据所述行为和/或所述生命体征监测用户是否触发了设定的报警事件;
7、若是,则根据所触发的报警事件类型,执行对应的报警操作。
8、在一些实施例中,根据所述回波信号计算用户的点云数据,包括:
9、将所述回波信号转换为数字信号;
10、对所述数字信号做距离维快速傅里叶变换和多普勒维傅里叶变换,得到所述空间中所有目标单元的距离-多普勒图谱;
11、对所述距离-多普勒图谱进行非相干累加,并采用预设门限参数对累加结果进行二维恒虚警检测,以提取用户在距离-多普勒图谱上对应的目标单元;
12、对所述用户对应的目标单元进行方位-俯仰联合测角,得到所述目标单元的方位角和俯仰角;
13、根据所述方位角和俯仰角以及距离-多普勒图谱上对应的距离单元,得到目标单元在空间中对应的点数据;
14、根据所述用户的所有点数据生成用户的点云数据。
15、在一些实施例中,根据所述点云数据计算用户的行为,包括:
16、计算所述点云数据中所有监测点的分布状态数据;
17、对所述用户的点云数据进行聚类融合,得到所述点云数据的拟合中心;
18、对所述拟合中心进行卡尔曼滤波跟踪,得到所述拟合中心的运动数据,所述运动数据包括运动轨迹数据、运动速度数据;
19、根据所述分布状态数据和所述运动数据生成所述用户的行为。
20、在一些实施例中,设定的报警事件包括跌倒事件和坠床事件;
21、根据所述行为监测用户是否触发了设定的报警事件,包括:
22、根据所述分布状态数据计算点云数据中低于或等于设定高度的监测点占所有监测点的比值;
23、根据所述运动速度数据计算用户的速度变化值;
24、当所述速度变化值大于或等于设定值,且所述比值大于或等于设定比值时,根据所述运动轨迹数据确认用户的行动状态,所述行动状态包括卧床状态和离床状态;
25、若所述用户处于卧床状态,则判定用户触发了坠床事件;
26、若所述用户处于离床状态,则判定用户触发了跌倒事件。
27、在一些实施例中,设定的报警事件包括独自外出事件和无人活动事件;
28、根据所述行为监测用户是否触发了设定的报警事件,还包括:
29、当根据所述运动轨迹数据监测到用户离开空间且间隔第一设定时长后未返回空间时,判定用户触发了独自外出事件;以及
30、当根据所述运动轨迹数据监测到用户在空间内单次停留的时长超过第二设定时长时,判定用户触发了无人活动事件。
31、在一些实施例中,所述毫米波雷达具有多根天线;
32、根据所述回波信号计算用户的呼吸和心跳所引起的相位变化数据,包括:
33、在得到空间中所有目标单元的距离-多普勒图谱后,对任意一根天线的距离-多普勒图提取多普勒为0的相位数据;
34、对所述相位数据做多帧数据积累,得到多普勒为0的慢多普勒相位数据;
35、对所述慢多普勒相位数据做静态过滤,以筛选出空间中处于静态的用户的慢多普勒相位数据;
36、基于预设的峰值阈值从静态过滤后的慢多普勒相位数据筛选峰值,根据所述峰值确定静态的用户所在的目标距离单元;
37、在所述慢多普勒相位数据的目标距离单元上提取相位,得到所述相位变化数据。
38、在一些实施例中,根据所述相位变化数据计算用户的生命体征,包括:
39、采用根据呼吸频率的频率段设计的6阶巴特沃兹滤波器对所述相位变化数据进行滤波处理,提取出呼吸波形数据;
40、对所述呼吸波形数据做快速傅里叶变换提取呼吸周期,以计算出用户的呼吸频率;
41、采用根据心率的频率段设计的6阶巴特沃兹滤波器对所述相位变化数据进行滤波处理,提取出心率波形数据;
42、对所述心率波形数据做小波变换处理后再做快速傅里叶变换提取出心率周期,以计算出用户的心率。
43、在一些实施例中,设定的报警事件还包括呼吸异常事件和心率异常事件;
44、根据所述生命体征监测用户是否触发了设定的报警事件,还包括:
45、若监测到用户的心率低于设定心率阈值,则判定用户触发了心率异常事件;
46、若监测到用户的呼吸频率低于设定呼吸阈值,则判定用户触发了呼吸异常事件。
47、为实现上述目的,本技术实施例还提出一种基于毫米波雷达的多功能健康监测系统,包括存储器、处理器及存储在存储器上并可在处理器上运行的基于毫米波雷达的多功能健康监测程序,所述处理器执行所述基于毫米波雷达的多功能健康监测程序时实现如上述任一项所述的基于毫米波雷达的多功能健康监测方法。
48、为实现上述目的,本技术实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有基于毫米波雷达的多功能健康监测程序,所述基于毫米波雷达的多功能健康监测程序被处理器执行时实现如上述任一项所述的基于毫米波雷达的多功能健康监测方法。
49、可以理解,本技术技术方案的基于毫米波雷达的多功能健康监测方法,能够通过空间中的回波信号,得到被监测用户的点云数据和相位变化数据,再基于该点云数据和相位变化数据计算得到被监测用户的行为和生命体征,如此,便可基于该行为和生命体征,同时实现多种监测功能,如人数检测、跌倒检测、心率检测、呼吸检测、外出检测等功能,并且这些监测功能是全天候且无感的。如此,相较于现有监测方案,本方案具有以下优点:
50、1、多功能监测:本技术的技术方案基于毫米波雷达技术可同时实现人数检测、跌倒检测、心率检测、呼吸检测、外出检测等多种检测功能,用户可以根据需求进行自主选择其中的一项或多项功能;
51、2、低成本:本技术的技术方案仅需一个雷达就能实现多种监测功能,相较于多个非穿戴式设备组合实现多种功能监测的系统而言,成本更低,性价比更高;
52、3、非接触式的全天候监测:本技术的技术方案的监测方法能够不需要任何接触即可做到24小时全天候监测,做到真正的无感守护;
53、4、保护隐私:与摄像头不同,毫米波雷达在监测过程中不会生成图像,而只会捕捉简单的轨迹和点云数据。这意味着用户的隐私得到了有效的保护,不会触及到个人隐私问题;
54、5、双向通话:当被监测用户触发报警事件时,系统可以通过云端服务器平台自行拨打电话给绑定终端,以使被监测用户与终端用户第一时间取得联系。
- 还没有人留言评论。精彩留言会获得点赞!