一种输送装置及机器人设备的制作方法
本发明涉及医疗器械,尤其是涉及一种输送装置及机器人设备。
背景技术:
1、消化道、呼吸道及尿道等自然腔道是人类常见疾病易发部位,由于病灶处于人体自然腔道内部,因此,需要通过软式内镜进行检查和治疗。机器人辅助软式内镜介入技术使得医生可以通过控制手柄来操作软式内镜,大幅降低医生的体力和手工操作劳动强度,降低手术的操作对技能和经验的依赖,减少对医务人员的辐射,同时提高手术效率和安全性。
2、软式内镜精准、连续、稳定输送是在复杂的自然腔道环境中完成病变筛查、活检、剥离组织等任务的重要前提。临床中,内镜输送依赖于医生手部的技巧性和经验性操作。
3、内镜及手术器械在输送的过程中往往需要伴随着旋转运动,以便于快速对自然腔道疾病进行观察和定位,提高手术效率。然而,现有的软式内镜输送装置并未满足临床对软式内镜输送的需求,存在旋转运动缺失、输送和旋转运动不能同时进行、软式内镜及器械拆卸困难等问题。
技术实现思路
1、有鉴于此,本发明的第一个目的是提供一种输送装置,旨在实现夹紧柔性器械后对其进行输送和旋转操作,在紧急情况下,可以快速将柔性器械取下。
2、本发明的第二个目的是提供一种机器人设备。
3、为了实现上述第一个目的,本发明提供了如下方案:
4、一种输送装置,包括:
5、动力机构,所述动力机构包括输送动力结构及旋转动力结构,所述输送动力结构安装在所述旋转动力结构上,所述旋转动力结构安装在机器人的机械臂末端,用于带动所述输送动力结构转动;
6、夹持待输送的柔性器械的执行机构,所述执行机构与所述输送动力结构卡接,且当所述执行机构与所述输送动力结构卡接到位时,所述输送动力结构与所述执行机构传动连接,以带动所述执行机构夹持的柔性器械沿着预设方向进行输送。
7、在一个具体的实施方案中,所述输送动力结构包括:
8、输送动力件,所述输送动力件安装在所述旋转动力结构上;
9、输送转轴,所述输送转轴与所述输送动力件传动连接;
10、第一输送对接件,所述第一输送对接件安装在所述输送转轴上,用于与所述执行机构对接,以实现传动连接。
11、在另一个具体的实施方案中,所述输送动力结构还包括安装架;
12、所述安装架具有容纳所述执行机构的容纳腔;
13、所述输送动力件安装在所述安装架背离所述容纳腔的一端,所述输送转轴可转动安装在所述安装架上,所述输送动力件与所述输送转轴传动连接;
14、所述第一输送对接件的一端与所述输送转轴传动连接,另一端用于传动连接所述执行机构。
15、在另一个具体的实施方案中,所述第一输送对接件包括:
16、位于所述容纳腔外的花键轴套,所述输送转轴面向所述容纳腔的一端设置有花键,所述花键轴套的一端可滑移套设在所述花键外,且与所述花键传动连接,所述花键轴套的另一端与所述容纳腔的外壁抵接,且所述花键轴套的另一端设置有延伸至所述容纳腔内的连接轴;
17、输送对接盘,所述输送对接盘位于所述容纳腔内,且所述输送对接盘与所述连接轴连接;
18、套设在所述输送对接盘外的输送弹性复位件,所述输送弹性复位件的一端与所述输送对接盘上设置的凸台抵接或者连接,所述输送弹性复位件的另一端与所述容纳腔的腔底抵接或者连接。
19、在另一个具体的实施方案中,所述输送动力结构还包括位于所述容纳腔外的输送传送组件;
20、所述输送传送组件的一端与所述输送动力件传动连接,所述输送传送组件的另一端与所述输送转轴传动连接。
21、在另一个具体的实施方案中,所述执行机构包括:
22、执行壳体,所述执行壳体与所述旋转动力结构卡接,所述执行壳体具有承载所述柔性器械的承载腔;
23、第二输送对接件,所述第二输送对接件可转动安装在所述执行壳体上,且所述第二输送对接件位于所述承载腔外,用于与所述第一输送对接件传动连接;
24、均设置在所述承载腔内的主动轮组件及从动轮组件,所述主动轮组件与所述第二输送对接件延伸至所述承载腔内的一端传动连接,所述从动轮组件与所述主动轮组件间隔设置,以夹持所述柔性器械,所述主动轮组件能够带动所述柔性器械沿着预设方向移动。
25、在另一个具体的实施方案中,所述输送装置还包括用于调节所述从动轮组件与所述主动轮组件之间的间距的夹紧调节组件。
26、在另一个具体的实施方案中,所述夹紧调节组件包括:
27、夹紧驱动件,所述夹紧驱动件安装在所述输送动力结构上;
28、丝杠,所述丝杠与所述输送动力结构可转动连接,且所述丝杠与所述夹紧驱动件传动连接;
29、与所述丝杠传动连接的螺母;以及
30、与所述螺母连接的第一压紧块,所述第一压紧块能够驱动所述从动轮组件向靠近所述主动轮组件的方向移动。
31、在另一个具体的实施方案中,所述夹紧调节组件还包括设置在所述旋转动力结构上的限转板,所述限转板用于限位所述螺母转动;
32、和/或,所述夹紧调节组件还包括分别与所述夹紧驱动件及所述丝杠传动连接的同步带组件;
33、和/或,所述从动轮组件的不动部及所述执行壳体中,一者上设置有导轨,另一者上设置有与所述导轨滑动连接的导轨块。
34、在另一个具体的实施方案中,所述从动轮组件的不动部上设置有贯穿所述承载腔的第二压紧块,所述第二压紧块与所述第一压紧块抵接;
35、所述从动轮组件的不动部与所述执行壳体之间连接有从动弹性复位件,用于所述从动轮组件的复位。
36、在另一个具体的实施方案中,所述输送装置还包括用于检测所述柔性器械的输送长度的长度检测机构。
37、在另一个具体的实施方案中,所述从动轮组件的转动部传动连接有第一检测对接件;
38、所述长度检测机构包括:
39、与所述第一检测对接件对接的第二检测对接件;以及
40、磁编码器,所述磁编码器安装在所述输送动力结构上,用于根据所述第二检测对接件转动的圈数获取所述柔性器械的输送长度。
41、在另一个具体的实施方案中,所述长度检测机构还包括:
42、与所述输送动力结构可转动连接的检测转轴,所述检测转轴的一端延伸至所述输送动力结构的容纳腔内,并与位于所述容纳腔内的所述第二检测对接件连接,所述检测转轴的另一端延伸至所述容纳腔外,所述磁编码器安装在所述检测转轴的另一端;
43、位于所述容纳腔内的检测弹性复位件,所述检测弹性复位件套设在所述检测转轴外,且所述检测弹性复位件的一端与所述检测转轴外设置的检测凸台连接或者抵接,所述检测弹性复位件的另一端与所述容纳腔的腔壁连接或者抵接。
44、在另一个具体的实施方案中,所述从动轮组件的转动部连接有扭矩弹簧管,所述扭矩弹簧管远离所述从动轮组件的一端连接有扭矩输出轴,所述扭矩输出轴背离所述扭矩弹簧管的一端与所述第一检测对接件连接;
45、和/或,所述输送动力结构及所述磁编码器的基座中,一者上安装有导向柱,另一者上开设有与所述导向柱导向配合的导向孔。
46、在另一个具体的实施方案中,所述旋转动力结构包括:
47、旋转动力件,所述旋转动力件安装在所述机械臂末端;
48、旋转传动组件,所述旋转传动组件的一端与所述旋转动力件传动连接;
49、与所述旋转传动组件另一端传动连接的转动件,所述转动件可转动安装在所述机械臂末端,所述输送动力结构安装在所述转动件上。
50、在另一个具体的实施方案中,所述旋转动力结构还包括转动板,所述转动板安装在所述转动件上,所述输送动力结构安装在所述转动板上;
51、和/或,所述转动件上开设有u形口,以允许所述柔性器械穿过;
52、和/或,所述旋转传动组件为同步带组件,所述旋转动力结构还包括设置在所述机械臂末端,且用于张紧所述同步带组件的同步带的张紧轮组件。
53、在另一个具体的实施方案中,所述执行机构与所述输送动力结构中,一者上设置有卡接组件,另一者上设置有与卡接组件卡接的卡接孔;
54、和/或,
55、所述执行机构与所述输送动力结构中,一者上设置有定位导柱,另一者上开设有与所述定位导柱导向配合的定位孔。
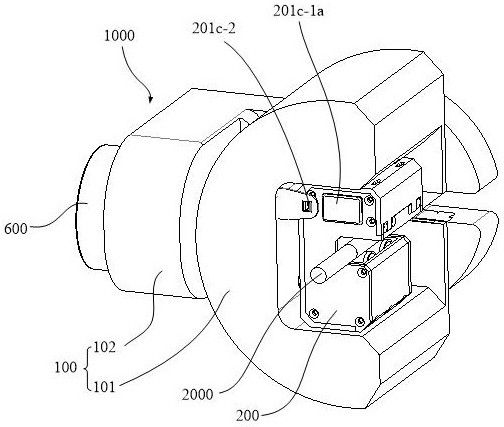
56、在另一个具体的实施方案中,所述卡接组件设置在所述执行机构上,所述卡接孔开设在所述输送动力结构上;
57、所述卡接组件包括卡接件、卡勾以及卡接弹性件;
58、所述执行机构的执行壳体上开设有第一外露孔及第二外露孔,所述卡接件安装在所述执行壳体内,且所述卡勾设置在所述卡接件上,所述卡接弹性件安装在所述执行壳体内,且所述卡接弹性件与所述卡接件抵接或者连接,以推动所述卡接件上的按压部穿过所述第一外露孔,所述卡勾穿过所述第二外露孔并与所述卡接孔卡接。
59、在另一个具体的实施方案中,所述输送装置还包括支架;
60、所述支架的一端通过六维力传感器与所述机械臂末端连接,另一端与所述输送动力结构连接。
61、根据本发明的各个实施方案可以根据需要任意组合,这些组合之后所得的实施方案也在本发明范围内,是本发明具体实施方式的一部分。
62、本发明提供的输送装置,使用时,将输送装置安装在机器人的机械臂末端,并将待输送的柔性器械夹持到执行机构内,当需要输送及旋转柔性器械的动作同时进行时,通过旋转动力结构启动,带动输送动力结构旋转,而夹持柔性器械的支持机构安装在输送动力结构上,因此,实现了柔性器械的旋转;输送动力结构在旋转动力结构启动的同时也启动,从而通过执行机构带动柔性器械沿着预设方向输送,即本发明实现了柔性器械的输送和旋转动作的同时进行。此外,由于夹持机构与输送动力结构卡接,因此,当需要拆卸柔性器械时,仅需要解除夹持机构与输送动力结构之间的卡接即可实现将夹持机构与柔性器械整体的拆卸,方便快捷。
63、为了实现上述第二个目的,本发明提供了如下方案:
64、一种机器人设备,包括机器人及如上述中任意一项所述的输送装置;
65、所述输送装置安装在所述机器人的机械臂末端。
66、由于本发明提供的机器人设备包含上述任意一项中的输送装置,因此,上述输送装置所具有的有益效果均是本发明提供的机器人设备所包含的。
- 还没有人留言评论。精彩留言会获得点赞!