一种腔镜手术机器人的激光对位方法与流程
本发明涉及机器人,尤其涉及一种腔镜手术机器人的激光对位方法。
背景技术:
1、腔镜手术机器人是目前应用最广泛的手术机器人,它能够辅助医生完成各类复杂的微创手术,提高手术精准度及安全性,可用于泌尿外科、妇科、胸外科、普外科等相关科室的微创手术,其出现显著改变了微创伤手术的格局。
2、腔镜手术机器人系统通常包括用户控制台、患者手术平台和仪器台车。用户控制台用于接收操作者的手部运动信息,以作为整个系统的运动控制信号输入。用户控制台可包括座椅组件、脚踏组件、主机械臂以及显示器,其中,显示器用于显示患者体内手术部位的视图,通常为开放式显示器或沉浸式显示器,安装在用户控制台的立柱上,可根据操作者的指令进行升降调整。内窥镜定位功能属于术前预摆位阶段的一项功能,激光点位置对准技术即激光对位技术是腔镜手术机器人术前预摆位环节中内窥镜定位功能的关键一步。
3、现有的腔镜手术机器人激光对位技术的主流方法是通过运动学解析解进行关节位置的解算,这种方法可以一次性完成路径规划,对控制系统的解算压力较小,但同时也存在着一些问题,如下:
4、1、方程解算的复杂度高,尤其是对于受约束关节较多的机器人模型;
5、2、易出现多解、漏解、奇异解等情况,若未能避免,可能造成机器人运动位置的跳变、无解,甚至失控;
6、3、现有的方法为纯规划方法,规划完成后,各关节沿各自规划路径运动,灵活性较差。
技术实现思路
1、发明目的:针对上述不足,本发明提供一种腔镜手术机器人的激光对位方法,改善了机器人在激光对位过程中的安全性与顺畅性,同时激光对位路径可通过约束条件进行控制,提高了对位过程的可控性与灵活性。
2、技术方案:
3、本发明提供一种腔镜手术机器人的激光对位方法,包括:
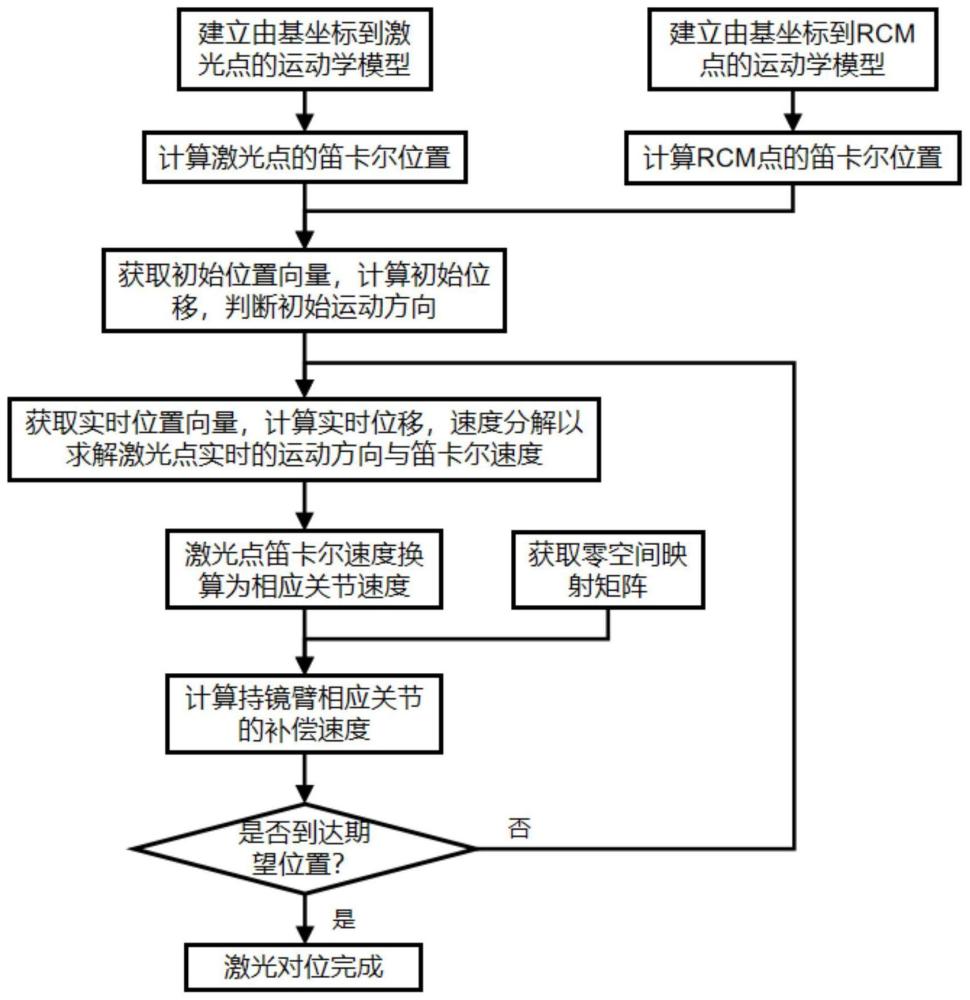
4、s1、获取激光点与rcm点的初始笛卡尔位置,根据二者之间的位移计算得到激光点的初始位移方向,据此给定一激光点的初始笛卡尔速度,控制激光点运动;
5、s2、获取激光点的实时笛卡尔位置,根据二者之间的实时位移计算得到激光点的实时位移方向;
6、s3、确定激光点位置的受约束关节,获取激光点的实时笛卡尔速度,结合激光点的实时位移方向计算得到激光点位置的受约束关节的关节速度;
7、s4、确定维持rcm点位姿相对固定的相关关节,结合s3构建各相关关节速度的控制任务向量,求解所述控制任务向量得到各相关关节的补偿速度,并据此进行补偿控制;
8、s5、重复s4,直至激光点与rcm点的位置对准。
9、具体地,所述s1和s2中,基于相同的基坐标系,根据设计参数分别建立激光点和rcm点的运动学模型,计算得到激光点和rcm点的笛卡尔位置,由此得到激光点和rcm点之间的位移。
10、更具体地,根据激光点和rcm点之间的位移在基坐标系对应坐标轴上的分量计算得到对应的位移方向。
11、更具体地,所述s3包括:
12、根据激光点位置的受约束关节得到激光点位置的约束方程,根据运动学模型得到激光点到基坐标系的变换矩阵,进而得到对应的雅克比矩阵,结合激光点的实时笛卡尔速度计算得到激光点位置的各受约束关节的关节速度。
13、更进一步地,所述激光点位置的受约束关节包括横梁转动关节j1和可伸缩关节j2;
14、则激光点位置的约束方程为[vx vy 0 0 0 0]t,其中,vx和vy通过激光点的实时笛卡尔速度计算其在基坐标系的x方向和y方向上的分量得到;
15、根据运动学模型得到激光点相对于基坐标系的变换矩阵t(θ1),进而得到对应的雅克比矩阵j(θ1),求得各受约束关节的关节速度其中,θ1为激光点位置的受约束关节的角度:
16、
17、具体地,确定维持rcm点位姿相对固定的相关关节,结合s3构建各相关关节速度的控制任务向量,通过零空间方法求解所述控制任务向量,得到各相关关节的补偿速度,其中所述零空间方法如下:
18、所述维持rcm点位姿相对固定的相关关节包括影响rcm点位姿的持镜臂关节和激光点位置的受约束关节;
19、结合s3构建当前时刻各相关关节速度的控制任务向量为v,通过零空间映射矩阵n对控制任务向量v进行处理求解得到下一时刻各相关关节的补偿速度,具体为;
20、
21、取中对应数量的元素即为下一时刻各相关关节的补偿速度。
22、更具体地,所述零空间映射矩阵n具体为:
23、n=in-(jn(θ2))-1×jn(θ2)
24、其中,in表示单位矩阵,阶数n根据维持rcm点位姿相对固定的相关关节数量确定;θ2为维持rcm点位姿相对固定的相关关节的角度;jn(θ2)表示雅克比矩阵,由根据运动学模型得到的rcm点相对于基坐标系的变换矩阵tn(θ2)计算得到。
25、更进一步地,所述影响rcm点位姿的持镜臂关节包括吊盘旋转关节j3、转台旋转关节j4、横臂伸缩关节j5、竖臂升降关节j6、rcm臂偏航关节j7、预俯仰关节j8、rcm臂翻转关节j9、rcm臂俯仰关节j10;
26、所述激光点位置的受约束关节为横梁转动关节j1和可伸缩关节j2;
27、结合s3得到的激光点位置的受约束关节的关节速度构建当前时刻各相关关节速度的控制任务向量v=[v1 v2 0 0 0 0 0 0 0 0]t;
28、其中,v1、v2为激光点位置的受约束关节的关节速度;
29、通过零空间映射矩阵n对控制任务向量v进行处理,零空间映射矩阵n具体为:
30、n=i10-(j10(θ2))-1×j10(θ2)
31、则得到:
32、
33、进而得到下一时刻维持rcm点位姿相对固定的各相关关节的补偿速度。
34、具体地,所述s4中,还包括:设定激光点位置的各受约束关节的机械限位r=[min,max],并为其添加关节软限位δ1和激光对位的功能限位δ2,则最终可得影响激光点位置的各关节的运动范围为[min+δ1+δ2,max-δ1-δ2],当其中某一受约束关节运动至该范围之外时,对该受约束关节作限速处理。
35、具体地,在控制激光点运动以完成激光对位的过程中,预设激光点的减速时间tdec,根据减速前的激光点的笛卡尔速度vmax,计算得到激光点的理论匀减速距离ddec=vmax/2*tdec;
36、判断激光点与rcm点之间的实时位移ds是否小于等于激光点的理论匀减速距离ddec,若满足,则控制激光点进入匀减速阶段,直至其速度减为零,并在此过程中,根据s3计算激光点的实时笛卡尔速度。
37、有益效果:本发明改善了机器人在激光对位过程中的安全性与顺畅性,同时激光对位路径可通过约束条件进行控制,有效避免了现有技术采用的规划算法,在规划完成后控制运动,从而导致灵活性差的问题,提高对位过程的可控性与灵活性。本发明无需采用运动学解析进行关节位置的解算,可以有效避免现有技术中存在的复杂度高、多解、漏解或奇异解的情况。
- 还没有人留言评论。精彩留言会获得点赞!