手术床与手术机器人的联动系统的制作方法
本申请涉及智能手术系统,特别涉及手术床与手术机器人的联动系统。
背景技术:
1、在手术的过程中,手术机器人在手术医生的控制下在患者身上执行具体的手术操作。在一些情况下,会需要调节患者身下的手术床的倾斜角来调节用户的位姿,以利于手术操作。在患者的位姿发生变化之后,机械臂与患者的相对位置发生了改变,这使得手术机器人原先的手术规划信息等都需要进行相应调整。通常情况下,手术床是通用的,是与手术机器人是没有信息交互的,从而较难实现这一调整过程。
2、为了能够实现这一调整过程,现有技术通常采用以下三种方法:1、定制手术床与手术机器人为一个联动系统,也即使得手术床与手术机器人之间能够进行信息交互,这样便可以实现手术床位姿调整时手术机器人随之调整;2、在使用通用手术床的情况下,通过光学导航系统测量rcm(remote center of motion,远端运动中心点)点在手术床位姿变化前、后的坐标,根据rcm点在手术床位姿变化前、后的坐标来确定手术器械调整的目标位姿,以使调整后的手术器械与患者的相对位置不变;3、在使用通用手术床的情况下,通过设置在手术床上的陀螺仪和相机等确定手术床位姿变化前、后的位姿,根据手术床位姿变化前、后的位姿确定手术器械调整的目标位姿,以使调整后的手术器械与患者的相对位置不变。
3、上述方法1中定制手术床的成本较高,方法2中光学导航系统的信号频率为60hz,延时较大,影响手术效率,方法3中陀螺仪和相机的计算精度较低,误差较大。
技术实现思路
1、本说明书的目的是提供一种手术床与手术机器人的联动系统,以解决现有手术床与手术机器人的联动方式成本高、延时大、精度低的问题。
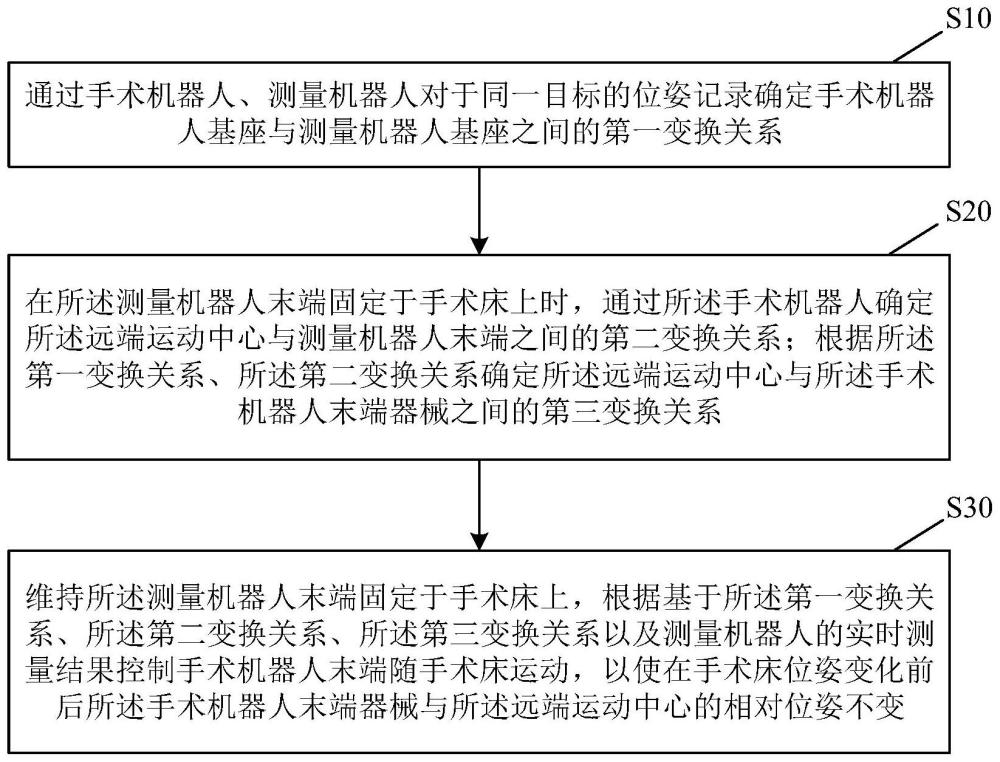
2、为解决上述技术问题,本说明书提供一种手术床与手术机器人的联动系统,包括手术床、手术机器人和测量机器人;所述手术床上用于设置所述手术机器人的远端运动中心;通过手术机器人、测量机器人对于同一目标的位姿记录确定手术机器人基座与测量机器人基座之间的第一变换关系;在所述测量机器人末端固定于手术床上时,通过所述手术机器人确定所述远端运动中心与测量机器人末端之间的第二变换关系;根据所述第一变换关系、所述第二变换关系确定所述远端运动中心与所述手术机器人末端器械之间的第三变换关系;维持所述测量机器人末端固定于手术床上,根据基于所述第一变换关系、所述第二变换关系、所述第三变换关系以及测量机器人的实时测量结果控制手术机器人末端随手术床运动,以使在手术床位姿变化前后所述手术机器人末端器械与所述远端运动中心的相对位姿不变。
3、在一些实施例中,所述手术机器人与所述手术床的预定面平行设置;或者,所述手术机器人与所述手术床的预定面呈角度设置;其中,所述手术床的预定面为用于固定所述测量机器人末端的一侧表面。
4、在一些实施例中,所述手术床具有一个活动自由度,实现所述活动自由度的旋转轴水平设置,并且所述旋转轴与所述预定面垂直设置。
5、在一些实施例中,所述手术机器人与所述手术床的预定面之间的角度,包括所述手术机器人基座的一侧表面与所述手术床的预定面之间的角度。
6、在一些实施例中,所述手术机器人基座上设置有第一测量基准、第二测量基准,所述测量机器人末端设置有距离测量装置;通过所述测量机器人末端分别对准第一测量基准、第二测量基准时所述距离测量装置的测量结果以及所述测量机器人记录的末端位置,确定所述手术机器人与所述手术床的预定面之间的夹角。
7、在一些实施例中,所述测量机器人包括三自由度机械臂和设置于所述三自由度机械臂末端关节的固定块,所述三自由度机械臂的末端关节通过所述固定块固定于所述手术床上的目标点;所述三自由度机械臂包括相互平行的三个关节轴,所述三自由度机械臂的末端关节可绕所述固定块转动;其中,在所述三自由度机械臂运动时,所述固定块可在三个自由度上移动。
8、在一些实施例中,确定所述第一变换关系包括:在所述测量机器人末端固定在所述手术床上时,记录所述测量机器人的末端位姿;维持所述测量机器人和所述手术床的位姿,并控制所述手术机器人末端触碰所述测量机器人末端,记录手术机器人的第一末端位姿;根据所述测量机器人的末端位姿和所述手术机器人的第一末端位姿,确定所述第一变换关系。
9、在一些实施例中,确定所述第二变换关系包括:在所述测量机器人末端固定在所述手术床上时,记录测量机器人的末端位姿;维持所述测量机器人和所述手术床的位姿,并控制手术机器人末端至所述远端运动中心,记录所述手术机器人的第二末端位姿;根据所述测量机器人的末端位姿和所述手术机器人的第二末端位姿,确定所述第二变换关系。
10、在一些实施例中,确定所述第三变换关系包括:维持所述测量机器人和所述手术床的位姿,并通过手术机器人确定手术机器人末端器械的位姿;根据所述测量机器人的末端位姿、所述手术机器人末端器械的位姿、所述第一变换关系、所述第二变换关系,确定所述第三变换关系。
11、在一些实施例中,控制手术机器人末端随手术床运动,包括:采用所述第一变换关系、所述第二变换关系对所述测量机器人记录的目标点的实时位姿进行处理,得到所述远端运动中心的预计位姿;对所述远端运动中心的预计位姿采用所述第三变换关系,得到所述手术机器人末端器械的新位姿;控制所述手术机器人末端器械移动至所述新位姿。
12、本说明书所提供的手术床与手术机器人的联动系统,借助于测量机器人确定手术床与手术机器人之间的位姿变换关系,并在手术床运动过程中采用测量机器人实时测量手术床的位姿,可以根据手术床的实时位姿调整手术机器人机械臂的位姿,使得手术器械与手术床的相对位置关系保持不变。
13、本方案仅需要在原有的通用手术床、手术机器人的基础上增设测量机器人即可实现手术床与手术机器人的联动,成本较低;本方案通过末端固定在手术床的测量机器人来测量手术床的位姿,手术床位姿一旦变化便可以检测到,并根据手术床的位姿变化确定快速确定手术机器人的联动方案,联动控制方法实时性较高、手术床的位姿检测精度较高,从而联动控制的准确性较高。
技术特征:
1.一种手术床与手术机器人的联动系统,其特征在于,包括手术床、手术机器人和测量机器人;所述手术床上用于设置所述手术机器人的远端运动中心;
2.根据权利要求1所述的手术床与手术机器人的联动系统,其特征在于,所述手术机器人与所述手术床的预定面平行设置;或者,所述手术机器人与所述手术床的预定面呈角度设置;
3.根据权利要求2所述的手术床与手术机器人的联动系统,其特征在于,所述手术床具有一个活动自由度,实现所述活动自由度的旋转轴水平设置,并且所述旋转轴与所述预定面垂直设置。
4.根据权利要求2所述的手术床与手术机器人的联动系统,其特征在于,所述手术机器人与所述手术床的预定面之间的角度,包括所述手术机器人基座的一侧表面与所述手术床的预定面之间的角度。
5.根据权利要求4所述的手术床与手术机器人的联动系统,其特征在于,所述手术机器人基座上设置有第一测量基准、第二测量基准,所述测量机器人末端设置有距离测量装置;
6.根据权利要求1所述的手术床与手术机器人的联动系统,其特征在于,所述测量机器人包括三自由度机械臂和设置于所述三自由度机械臂末端关节的固定块,所述三自由度机械臂的末端关节通过所述固定块固定于所述手术床上的目标点;所述三自由度机械臂包括相互平行的三个关节轴,所述三自由度机械臂的末端关节可绕所述固定块转动;其中,在所述三自由度机械臂运动时,所述固定块可在三个自由度上移动。
7.根据权利要求1所述的手术床与手术机器人的联动系统,其特征在于,确定所述第一变换关系包括:
8.根据权利要求1所述的手术床与手术机器人的联动系统,其特征在于,确定所述第二变换关系包括:
9.根据权利要求8所述的手术床与手术机器人的联动系统,其特征在于,确定所述第三变换关系包括:
10.根据权利要求1所述的手术床与手术机器人的联动系统,其特征在于,控制手术机器人末端随手术床运动,包括:
技术总结
本说明书公开了手术床与手术机器人的联动系统,借助于测量机器人确定手术床与手术机器人之间的位姿变换关系,并在手术床运动过程中采用测量机器人实时测量手术床的位姿,可以根据手术床的实时位姿调整手术机器人机械臂的位姿,使得手术器械与手术床的相对位置关系保持不变。本方案仅需要在原有的通用手术床、手术机器人的基础上增设测量机器人即可实现手术床与手术机器人的联动,成本较低;本方案通过末端固定在手术床的测量机器人来测量手术床的位姿,手术床位姿一旦变化便可以检测到,并根据手术床的位姿变化确定快速确定手术机器人的联动方案,联动控制方法实时性较高、手术床的位姿检测精度较高,从而联动控制的准确性较高。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:易达医(北京)健康科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!