一种可灵活拖动的手术臂的制作方法
本技术涉及医疗器械相关,具体涉及一种可灵活拖动的手术臂。
背景技术:
1、近年来,微创外科手术得到迅速发展,并在实践中得到非常好的手术效果。随着科技的进步,外科手术机器人技术得到迅速发展,并且已经被广泛运用。手术机器人系统通常包括:主端控制设备和从端执行设备;手术臂一般作为从端执行部件。
2、通常在手术过程中,会有多条手术臂同时使用,每次在手术进行前,医护人员都会对机械臂进行拖动,使戳卡不动点与患者体表打孔中心重合,拖动过程中,每个关节都处于自由状态,可以随意转动或移动,由于大部分转动关节或移动关节都包含电机、减速器等零件,在拖动过程中由于转动关节都会存在阻力(如摩擦力等),所以人拖动起来会是比较吃力。为了使人拖动起来顺畅和轻便,目前主流做法为通过电机电流环控制,如现有技术cn216658013u公开的一种机械臂的旋转机构,包括第一机械臂和第二机械臂,还包括设置在第一机械臂上的电机、第一齿轮、第二齿轮、制动轴、制动器和减速器,以及用于连接第一机械臂和第二机械臂的定位转盘;第一齿轮固定套设在电机的输出轴上,第一齿轮与第二齿轮啮合传动连接,第二齿轮套设在制动轴上,第二齿轮与减速器的输入端啮合传动连接,减速器的输出端与定位转盘连接,定位转盘与第二机械臂固定连接。
3、在上述现有技术中,在拖动手术臂时,电机尽可能的补偿系统的重力矩和摩擦力矩,但在手术臂处于静止状态时,用户需克服较大的静摩擦力,且依赖于参数辨识精度,由于很难做出精确的辨识,所以实际使用过程中效果并不是特别理想。
4、因此,为了精确判断手术臂中各关节的受力状态,进而实现灵活拖动手术臂,本实用新型提供一种可灵活拖动的手术臂。
技术实现思路
1、为了解决现有技术中的上述技术问题,本实用新型提供一种可灵活拖动的手术臂。
2、为实现上述目的,本实用新型的技术方案如下:
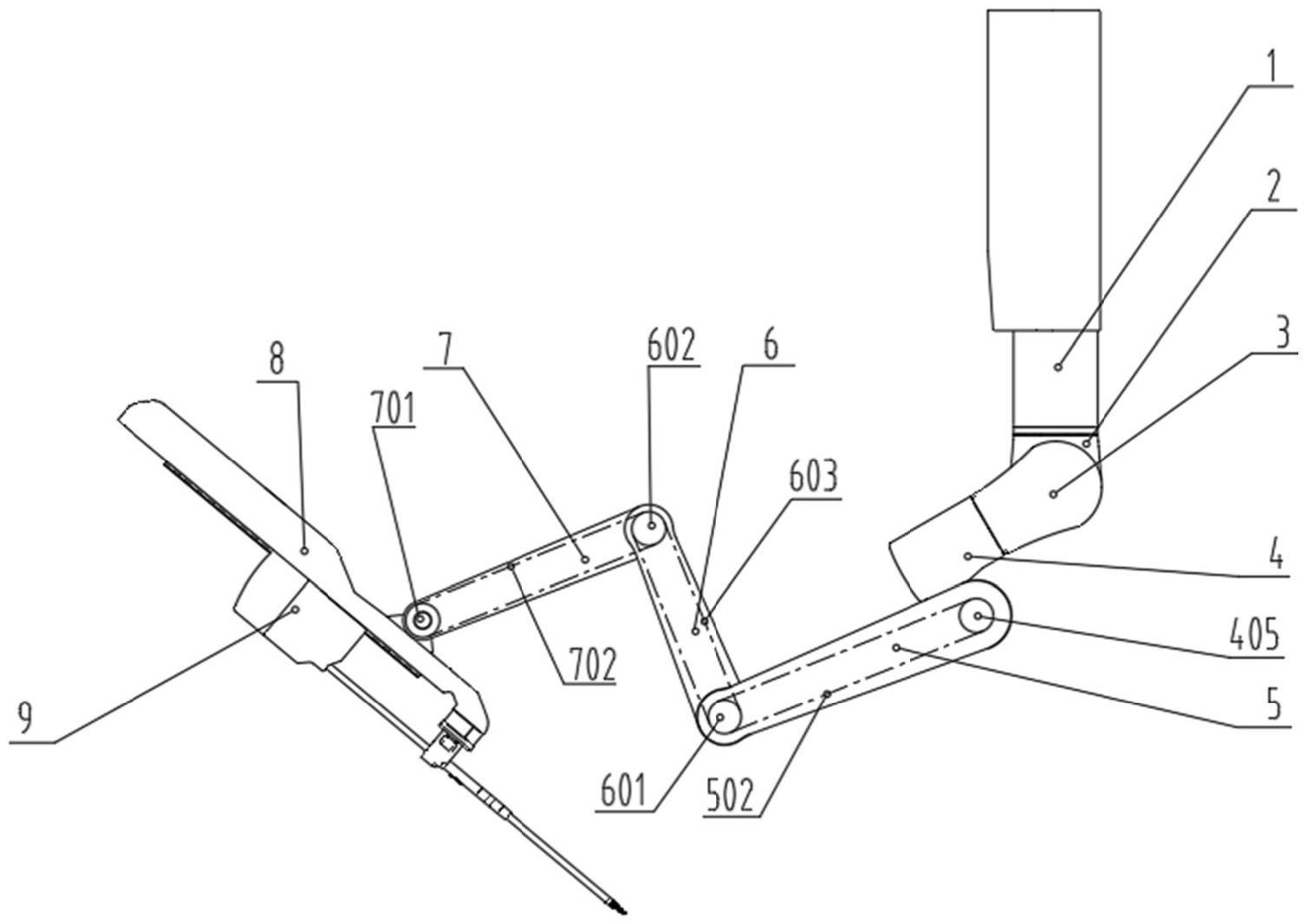
3、一种可灵活拖动的手术臂,包括依次连接的第一竖直轴、第二转轴组件、第三转轴组件、第四转轴组件、操纵臂、器械;第二转轴组件与第三转轴组件之间设置第一力矩检测结构,第三转轴组件与第四转轴组件之间设置第二力矩检测结构,第四转轴组件与操纵臂之间设置第三力矩检测结构。
4、进一步地,第一力矩检测结构和/或第二力矩检测结构和/或第三力矩检测结构为力矩传感器。
5、进一步地,第二转轴组件与第一竖直轴旋转连接,第一竖直轴沿竖直方向设置,第二转轴组件绕第一竖直轴的轴线旋转运动。
6、更进一步地,第三转轴组件与第二转轴组件旋转连接,第三转轴组件绕第二转轴组件的轴线旋转运动。
7、更进一步地,第三转轴组件的旋转轴线与第一竖直轴的轴线相交且垂直。
8、更进一步地,第四转轴组件与第三转轴组件旋转连接,第四转轴组件绕第三转轴组件的轴线旋转运动;第四转轴组件的旋转轴线与第三转轴组件的旋转轴线垂直且相交。
9、更进一步地,第二转轴组件包括第一转轴,第一转轴外侧套设第一力矩电机,第一力矩电机驱动第一转轴转动;第一转轴外侧还设置第一减速器,第一转轴与第一减速器的输入端连接,第一减速器的输出端连接第一力矩检测结构,第一力矩检测结构与第三转轴组件固定连接。
10、更进一步地,第四转轴组件包括第二转轴和第三转轴,第二转轴外侧套设第二力矩电机,第二力矩电机驱动第二转轴转动;第二转轴外侧还设置第二减速器,第二转轴与第二减速器的输入端连接,第二减速器的输出端连接第二力矩检测结构,第二力矩检测结构与第三转轴组件固定连接;
11、第三转轴外侧套设第三力矩电机,第三力矩电机驱动第三转轴转动,第三转轴外侧还设置第三减速器,第三转轴与第三减速器的输入端连接,第三减速器的输出端连接第三力矩检测结构;第三减速器外壳与操纵臂固定连接。第三力矩检测结构与第一传动轮固定连接
12、进一步地,操纵臂包括依次连接的第一臂杆、第二臂杆、第三臂杆和第四臂杆;第四转轴组件与第一臂杆的一端连接,第一臂杆的另一端与第二臂杆的一端旋转连接,第二臂杆的另一端与第三臂杆的一端旋转链接,第三臂杆的另一端与第四臂杆连接;第四臂杆上安装器械。
13、更进一步地,第一臂杆、第二臂杆、第三臂杆之间通过同步传动机构驱动。
14、更进一步地,同步传动机构为钢带传动机构,第一臂杆与第四转轴组件之间通过第三转轴连接,第一臂杆和第二臂杆之间通过第四转轴连接;第三转轴上设置第一传动轮,第四转轴上设置第二传动轮,第二传动轮与与第二臂杆固定连接,第一传动轮和第二传动轮上环绕设置第一钢带。
15、更进一步地,第四转轴上还设置第三传动轮,第三传动轮与第一臂杆固定连接,第二臂杆和第三臂杆之间通过第五转轴连接,第五转轴上设置第四传动轮,第四传动轮与第三臂杆固定连接,第三传动轮和第四传动轮上环绕设置第二钢带;
16、第五转轴上还设置第五传动轮,第五传动轮与第二臂杆固定连接,第三臂杆和第四臂杆之间通过第六转轴连接,第六转轴上设置第六传动轮,第六传动轮与第四臂杆固定连接,第五传动轮和第六传动轮上环绕设置第三钢带。
17、更进一步地,所述第一传动件和/或第二传动件和/或第三传动件为同步带、链条、传动丝、钢带中一种。
18、相对于现有技术,本实用新型具有以下有益效果:
19、本实用新型在第二转轴组件与第三转轴组件之间设置第一力矩检测结构,第三转轴组件与第四转轴组件之间设置第二力矩检测结构,第四转轴组件与操纵臂之间设置第三力矩检测结构;通过第一力矩检测结构、第二力矩检测结构、第三力矩检测结构可以实施监测旋转关节所受力矩大小,在拖动手术臂的过程中,可以准确的得到每个关节实际受力大小,无需通过复杂的动力学参数进行辨识,进而可以更加准确的通过电机电流环控制,实现零阻力拖动。
20、同时也可以通过实施监测关节力矩数据,判断手术臂是否运行正常,如若检测到关节力矩数据发生突变,说明手术臂可能受到外力或者运转异常,从而可以控制手术臂立刻停止运动,避免造成更大危险。
技术特征:
1.一种可灵活拖动的手术臂,其特征在于,包括依次连接的第一竖直轴、第二转轴组件、第三转轴组件、第四转轴组件、操纵臂;所述第二转轴组件与所述第三转轴组件之间设置第一力矩检测结构,所述第三转轴组件与所述第四转轴组件之间设置第二力矩检测结构,所述第四转轴组件与所述操纵臂之间设置第三力矩检测结构。
2.根据权利要求1所述的可灵活拖动的手术臂,其特征在于,所述第一力矩检测结构和/或第二力矩检测结构和/或第三力矩检测结构为力矩传感器。
3.根据权利要求1所述的可灵活拖动的手术臂,其特征在于,所述第二转轴组件与第一竖直轴旋转连接,所述第一竖直轴的轴线沿竖直方向设置,所述第二转轴组件绕第一竖直轴的轴线旋转运动;
4.根据权利要求3所述的可灵活拖动的手术臂,其特征在于,所述第二转轴组件包括第一转轴,所述第一转轴外侧套设第一力矩电机,所述第一力矩电机驱动第一转轴转动;所述第一转轴外侧还设置第一减速器,所述第一转轴与所述第一减速器的输入端连接,第一力矩检测结构与所述第一减速器的输出端连接,且所述第一力矩检测结构与第三转轴组件固定连接。
5.根据权利要求4所述的可灵活拖动的手术臂,其特征在于,所述第四转轴组件包括第二转轴和第三转轴,所述第二转轴外侧套设第二力矩电机,所述第二力矩电机驱动第二转轴转动;所述第二转轴外侧还设置第二减速器,所述第二转轴与第二减速器的输入端连接,第二力矩检测结构与第二减速器的输出端连接,且所述第二力矩检测结构与所述第三转轴组件固定连接。
6.根据权利要求5所述的可灵活拖动的手术臂,其特征在于,所述第三转轴外侧套设第三力矩电机,第三力矩电机驱动第三转轴转动,第三转轴外侧还设置第三减速器,第三转轴与第三减速器的输入端连接,第三减速器的输出端连接第三力矩检测结构;第三力矩检测结构与操纵臂固定连接。
7.根据权利要求6所述的可灵活拖动的手术臂,其特征在于,所述操纵臂包括依次连接的第一臂杆、第二臂杆、第三臂杆和第四臂杆;所述第四转轴组件与第一臂杆的一端连接,第一臂杆的另一端与第二臂杆的一端旋转连接,第二臂杆的另一端与第三臂杆的一端旋转链接,第三臂杆的另一端与第四臂杆连接;第四臂杆上安装器械;第一臂杆、第二臂杆、第三臂杆之间通过同步传动机构驱动。
8.根据权利要求7所述的可灵活拖动的手术臂,其特征在于,第一臂杆与第四转轴组件之间通过第三转轴连接,第一臂杆和第二臂杆之间通过第四转轴连接;第三转轴上设置第一传动轮,第四转轴上设置第二传动轮,第二传动轮与第二臂杆固定连接,第一传动轮和第二传动轮上环绕设置第一传动件。
9.根据权利要求8所述的可灵活拖动的手术臂,其特征在于,第四转轴上还设置第三传动轮,第二臂杆和第三臂杆之间通过第五转轴连接,第五转轴上设置第四传动轮,第四传动轮与第三臂杆固定连接,第三传动轮和第四传动轮上环绕设置第二传动件;
10.根据权利要求9所述的可灵活拖动的手术臂,其特征在于,所述第一传动件和/或第二传动件和/或第三传动件为同步带、链条、传动丝、钢带中一种。
技术总结
本技术涉及医疗器械相关技术领域,具体涉及一种可灵活拖动的手术臂,包括依次连接的第一竖直轴、第二转轴组件、第三转轴组件、第四转轴组件、操纵臂、器械;第二转轴组件与第三转轴组件之间设置第一力矩检测结构,第三转轴组件与第四转轴组件之间设置第二力矩检测结构,第四转轴组件与操纵臂之间设置第三力矩检测结构。本技术通过第一力矩检测结构、第二力矩检测结构、第三力矩检测结构可以实施监测旋转关节所受力矩大小,在拖动手术臂的过程中,可以准确的得到每个关节实际受力大小,无需通过复杂的动力学参数进行辨识,进而可以更加准确的通过电机电流环控制,实现零阻力拖动。
技术研发人员:程皓,李扬,彭程,徐敏
受保护的技术使用者:敏捷医疗科技(苏州)有限公司
技术研发日:20230213
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!