人形玩具的制作方法
人形玩具
1.本申请是国际申请日为2016年12月14日(进入中国国家阶段日期:2018年07月02日)、国际申请号为pct/jp2016/087256(国家申请号:201680077763.3)、发明名称为“人形玩具”的分案申请。
技术领域
2.本发明涉及一种人形玩具。
背景技术:
3.已知有一种使用者能够组装按部位划分的配件而完成并采取各种各样的姿势来玩赏的人形玩具。例如在专利文献1中公开了这样的人形玩具的结构:将连结腿部的球接头(相当于人体中所说的大腿关节)设为利用在腰部内的侧部固定的前后方向轴以能够摆动的方式支承的结构,通过变更左右的球接头之间的间隔,从而能够兼顾直立姿势和动态的腿打开姿势。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2009-34232号公报
技术实现要素:
7.发明要解决的问题
8.另外,作为人形玩具的设计主题的一例子,已知有一种人形机器人的设计。在作为人形机器人设计的人形玩具中,胸部、腹部、腰部等主要的躯干大多是被装甲覆盖的直线的且机械的设计。以往这些躯干配件是作为1个箱状配件、1个壳状配件设计的。为此,设于躯干的可动部位的移动容易产生不自由。
9.例如在人形机器人英雄的电视动画片、漫画中,一边将腿部动态地打开一边射击的、所谓的“招牌姿势(決
めポーズ
)”、“亮相姿势(見栄
きりポーズ
)”(以后,概括称作“招牌姿势”)的场景经常出现。作为使用者期望无论如何想要用人形玩具再现该姿势。
10.动态的腿打开还能够利用专利文献1的结构来实现。然而,实际上存在即使模仿姿势但看起来仍然欠缺电视动画片、漫画那样的动态感的情况。
11.即,电视动画片、漫画的招牌姿势、亮相姿势的场景是以在脚尖附近设置视点并用相对的焦点距离较短的镜头的摄像机拍摄的那样的透视进行描绘的场景。而且,由于朝向摄像机的腿有助于在该透视效果的作用下使近前侧被夸大表示,看起来较长且较强劲。另一方面,动态打开人形玩具的腿部并呈现在眼前,即使对其从与电视动画片、漫画的招牌姿势的视点相同的位置用肉眼观察,由于透视效果的不同,相比于电视动画片、漫画的招牌姿势,腿看起来仍较短、且在力度上欠缺。这是因为,肉眼的焦点距离长于描绘电视动画片、漫画的招牌姿势时的焦点距离且透视效果也较弱。
12.那么,如果说为了再现招牌姿势中的动态感、腿的长度而变更人形玩具的设计,那
么相反地,在除此以外的姿势(例如,直立姿势等)中则成为与本来的角色设定偏离的外观,因而不优选。
13.本发明的目的在于提供一种在采取所谓的招牌姿势的情况下、能够像电视动画片、漫画的场景那样使可动部位有力地伸长的人形玩具。
14.用于解决问题的方案
15.本发明为一种人形玩具,该人形玩具包括:腰部;腿部;以及连结构件,其为所述腰部与所述腿部之间的连结构造,并具有作为所述腰部与所述腿部之间的连接要素的第1轴,该第1轴能够在所述腿部靠近所述腰部的标准位置和自该标准位置分开的分开位置之间位移。
16.而且,在本发明所涉及的人形玩具中,可以是,所述分开位置从所述腰部看位于比所述标准位置靠下方且是外侧的位置。
17.而且,在本发明所涉及的人形玩具中,可以是,所述标准位置位于所述腰部的内部,所述分开位置为从所述腰部拉出的位置。
18.而且,在本发明所涉及的人形玩具中,可以是,所述连结构造具有4节滑块曲柄型的闭合连杆构造,滑动方向设定为所述人形玩具的上下方向,相当于曲柄销的轴为所述第1轴。
19.而且,在本发明所涉及的人形玩具中,可以是,所述连结构造将滑动范围的上端位置设为所述标准位置。
20.而且,在本发明所涉及的人形玩具中,可以是,所述连结构造具有一端与所述第1轴连结、另一端与所述腿部的大腿上端部的第2轴连结的中间连杆,通过以所述第1轴位于所述标准位置时所述第1轴位于左右方向、所述第1轴位于所述分开位置时所述第1轴位于上下方向的方式使所述中间连杆的杆姿势变化,从而构成为能够表现所述分开位置时的所述腿部的伸长。
21.发明的效果
22.采用本发明,能够提供一种在采取所谓的招牌姿势的情况下、能够像电视动画片、漫画的场景那样使可动部位有力地伸长的人形玩具。
附图说明
23.图1是应用了发明的人形玩具的前表面外观图。
24.图2是人形玩具的前表面外观图,表示使右腿部位移到“标准位置”、使左腿部位移到“分开位置”的状态。
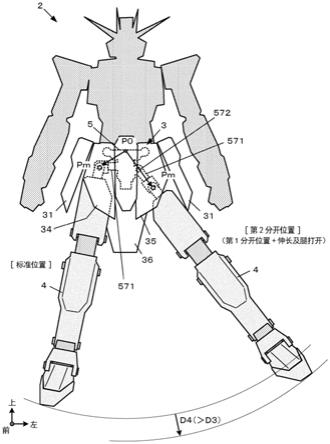
25.图3是人形玩具的前表面外观图,表示使右腿部位移到“标准位置”、使左腿部位移到“分开位置”并进一步将其上端部从内部空间向下方拉出并使其沿着上下左右平面打开的状态。
26.图4是连结构造部的立体分解图。
27.图5是腰部前方半体的后侧视图。
28.图6是腰部后方半体的前侧视图。
29.图7是用于说明右方连杆曲柄连结体的组装顺序的图。
30.图8是用于说明腰部的组装顺序的第1图。
31.图9是用于说明腰部的组装顺序的第2图。
32.图10是用于说明腰部的组装顺序的第3图。
33.图11是用于说明腰部的组装顺序的第4图。
34.图12是用于说明腰部的组装顺序的第5图。
35.图13是用于说明连结构造部的动作的第1图,图13的(1)是腿部位于标准位置时的腰部周围的纵剖视图,图13的(2)是将连结构造部的右侧部分机构简化表示的链接图(
リンク
図)。
36.图14是用于说明连结构造部的动作的第2图。
37.图15是用于说明连结构造部的动作的第3图。
具体实施方式
38.图1是应用了本发明的本实施方式的人形玩具的前表面外观图(正面外观图)。另外,为了容易理解,上半身由剪影表示。
39.人形玩具2具有模仿在电视动画片、漫画中出现的人形机器人的设计,为组装按部位划分的配件而制作的玩具。在本实施方式的人形玩具2中,上半身由头部、胸部、左右的臂部构成,下半身通过将腰部3和左右的腿部4借助内置于腰部的连结构造部5连结而构成。使用者能够变更头部、胸部、臂部、腰部、腿部的各配件的相对朝向、相对姿势,从而对人形玩具2的姿势进行各种各样的改变来玩赏。当然,人形玩具2的配件结构并不限定于本实施方式的例子。能够根据设为人形玩具2的模型的角色的设定进行适当变更。例如,还可以添加背囊部、手持的武器、盾等。
40.而且,相比于以往的人形玩具,本实施方式的人形玩具2例如能够以较高的视觉效果再现在人形英雄机器人的电视动画片、漫画中经常看到的“一边动态地将腿部打开一边射击”这样的以腿打开为关键的招牌姿势。为此,连结构造部5能够使腿部4从靠近腰部3的“标准位置”向自该标准位置分开的“分开位置”位移。
[0041]“标准位置”为人形玩具2处于直立姿势时的腰部3与腿部4之间的应有的相对位置关系,为人形玩具2如设为模型的人形英雄机器人的角色设定那样的腰部3与腿部4之间的位置关系。
[0042]“分开位置”例如为在使人形玩具2采取腿打开姿势的情况下向使腿部4伸长的方向自标准位置分开的位置。“分开位置”存在几个位置,在本实施方式中,以“第1分开位置”和比第1分开位置进一步分开的“第2分开位置”这两个位置为例进行说明。
[0043]
另外,在本实施方式中,由于与左右的腿部4相关的结构形成为左右对称,因此,在之后的对腰部3和连结构造部5的说明中,以左右的任一侧的腿部4为代表进行说明,并适当省略对另一侧的腿部4的图示、说明。
[0044]
图2是本实施方式的人形玩具的前表面外观图,表示了使右腿部4位移到“标准位置”、使左腿部4位移到“第1分开位置”的状态。而且,在图3中,表示了使左腿部4进一步位移到“第2分开位置”的状态。第2分开位置为使位于第1分开位置的左腿部4进一步将其上端部从内部空间向下方拉出并使其伸长、并且沿着上下左右平面使腿打开的状态下的位置。另外,第2分开位置还可以设为不打开腿而仅伸长的情况下的腿部4的位置。
[0045]
如图2所示,将腰部3与腹部之间的连结点视为基准点p0,将腿部4的相当于大腿骨
上端的位置视为位移点pm,当在标准位置和第1分开位置比较基准点p0到位移点pm的距离时,由于连结构造部5的动作,第1分开位置处的基准点p0到位移点pm(左腿部的位移点pm)的距离大于标准位置处的基准点p0到位移点pm(右腿部4的位移点pm)的距离。在腿部4的顶端位置进行比较时也可以明确腿部4伸长距离d3。
[0046]
此外,本实施方式的连结构造部5包括具有腿连结轴571(参照图3)的中间连杆(后述详细说明),该腿连结轴571能够在标准位置将腿部4的上端部拉入并收纳于腰部3的内部空间的里侧且在第1分开位置将腿部4的上端部从内部空间中向下方拉出。
[0047]
连结构造部5具有前后方向上的作为转动轴的曲柄销572(后述详细说明),能够使包含曲柄销572和与曲柄销572连接的腿连结轴571在内的连结构造部5的右下侧部分和左下侧部分沿着上下左右平面上下摆动(参照图3)。
[0048]
在腿连结轴571连结有腿部4的上端部。如图3所示,在使人形玩具2成为直立姿势的标准位置处,与曲柄销572连接的腿连结轴571在左右方向上成为大致水平的姿势。在使腿部4自第1分开位置进一步向第2分开位置位移并采取腿打开姿势时,以沿着将腿伸长的伸长方向的方式,使腿连结轴571的长度方向(将腿连结轴571设为杆时,该杆姿势)朝向该伸长方向。该结果,能够成为将腿部4与连结构造部5之间的连接部分从腰部3的内部空间向下方拉出的由图3的左腿部4的状态所示那样的第2分开位置。
[0049]
即,将腰部3与腹部之间的连结点视为基准点p0,将腿部4的相当于大腿骨上端的位置视为位移点pm,当在标准位置和第2分开位置比较基准点p0到位移点pm的距离时,由于连结构造部5的动作,第2分开位置处的基准点p0到位移点pm的距离大于标准位置处的基准点p0到位移点pm的距离。第2分开位置处的基准点p0到位移点pm的距离大于图2中的距离(第1分开位置处的基准点p0到位移点pm的距离)。即使在左右的腿部4的顶端位置进行比较,也可明确左腿部4伸长距离d4。而且,该第2分开位置处的左腿部4的状态成为再现像电视动画片、漫画的场景那样使腿有力地伸长的可视性。
[0050]
接着,详细说明连结构造部5的具体的结构例。
[0051]
图4是本实施方式的连结构造部5的立体分解图。
[0052]
本实施方式的连结构造部5在使腰部前方半体51和腰部后方半体52前后对接而划成的空间包括左方连杆曲柄连结体53l和右方连杆曲柄连结体53r。
[0053]
图5是腰部前方半体51的后侧视图。
[0054]
如图4所示,腰部前方半体51在前侧具有形成腰部3的正面的外观的腰部前表面外壳32。而且,如图5所示,自腰部前方半体51的背侧表面的中央到上部凹设有左右两个前方滑动槽511。而且,在该背侧表面的下部的左右分别凹设有前方主轴颈轴承孔512。
[0055]
图6是腰部后方半体52的前侧视图。
[0056]
如图4和图6所示,腰部后方半体52自前侧表面的中央到上部具有左右两个后方滑动槽521。而且,在该前侧表面的下部的左右分别凹设有后方主轴颈轴承孔522。
[0057]
接着,说明左方连杆曲柄连结体53l和右方连杆曲柄连结体53r的结构,左方连杆曲柄连结体53l和右方连杆曲柄连结体53r彼此形成为左右对称结构。因而,代表两者而说明右方连杆曲柄连结体53r。
[0058]
如图4所示,右方连杆曲柄连结体53r具有连杆54、前方曲柄半体55、后方曲柄半体56以及中间连杆57。
[0059]
连杆54具有向前后方向突出的滑动销541和曲柄销轴承孔542。曲柄销轴承孔542供中间连杆57的曲柄销572贯穿。
[0060]
前方曲柄半体55和后方曲柄半体56具有前后大致镜像对称的结构。前方曲柄半体55在上部具有前方曲柄销轴承孔551,在下部具有朝向前方突出设置的前方主轴颈552和朝向后方突出设置的凸型中央主轴颈553。后方曲柄半体56在上部具有后方曲柄销轴承孔561,在下部具有朝向后方突出设置的后方主轴颈562和朝向前方突出设置的凹型中央主轴颈563。
[0061]
中间连杆57以使左右方向上较长的腿连结轴571的一端与前后方向正交的方式设有曲柄销572。曲柄销572为腰部3与腿部4之间的连结构造,且是作为腰部3与腿部4之间的连接要素的第1轴。腿连结轴571的一端与该第1轴连结,腿连结轴571的另一端与腿部4的大腿上端部的第2轴连结。
[0062]
接着,说明连结构造部5以及腰部3的组装顺序。
[0063]
图7是用于说明右方连杆曲柄连结体53r的组装顺序的图。
[0064]
首先,将连杆54组装于中间连杆57。具体而言,以使曲柄销572的前方贯穿于曲柄销轴承孔542的方式进行组装。由于曲柄销572的前方侧设定为长于曲柄销轴承孔542的轴向长度,因此,曲柄销572穿过曲柄销轴承孔542。
[0065]
接着,组装曲柄。具体而言,自前方以将穿过了曲柄销轴承孔542的曲柄销572贯穿于前方曲柄半体55的前方曲柄销轴承孔551的方式组装前方曲柄半体55。然后,以使中间连杆57的后方侧的曲柄销572贯穿于后方曲柄销轴承孔561、且凹型中央主轴颈563与凸型中央主轴颈553对接并连结的方式,自后方组装后方曲柄半体56。
[0066]
对于左方连杆曲柄连结体53l也能够同样地进行组装。
[0067]
图8是用于说明腰部3的组装顺序的第1图。
[0068]
图9是用于说明腰部3的组装顺序的第2图。
[0069]
在组装腰部3时,首先,向腰部后方半体52组装右方连杆曲柄连结体53r和左方连杆曲柄连结体53l。具体而言,通过以使腿连结轴571朝向右方的姿势将滑动销541的后端部插入于后方滑动槽521、且将后方主轴颈562插入于右侧的后方主轴颈轴承孔522,从而自前方向腰部后方半体52组装右方连杆曲柄连结体53r。同样地,通过以使腿连结轴571朝向左方的姿势将滑动销541的后端部插入于后方滑动槽521、且将后方主轴颈562插入于左侧的后方主轴颈轴承孔522,从而自前方向腰部后方半体52组装左方连杆曲柄连结体53l。
[0070]
图10是用于说明腰部3的组装顺序的第3图。
[0071]
接着,在向腰部后方半体52组装了右方连杆曲柄连结体53r和左方连杆曲柄连结体53l之后,以在左右上部分别夹持用于安装腰部侧面外壳配件31(参照图1)的侧部附件30的方式自前方组装腰部前方半体51。此时,在右方连杆曲柄连结体53r和左方连杆曲柄连结体53l,滑动销541的前端部分别插入于腰部前方半体51的前方滑动槽511(参照图5)、且前方主轴颈552分别插入于前方主轴颈轴承孔512。由此,完成了腰部3的核心部(核部)的组装。
[0072]
图11是用于说明腰部3的组装顺序的第4图。
[0073]
接着,在腰部前方半体51和腰部后方半体52在前后方向上组合之后,自上方安装上部附件33。上部附件33兼作腰部3的上部外壳和腰部3的外壳配件的附件。
[0074]
图12是用于说明腰部3的组装顺序的第5图。
[0075]
接着,在上部附件33的前端部安装腰部右前外壳配件34和腰部左前外壳配件35。而且,在上部附件33的后端部安装腰部背面外壳配件36。而且,在左右的侧部附件30分别安装腰部侧面外壳配件31(参照图1)。由此,腰部3的外壳配件覆盖连结构造部5的周围,连结构造部5成为容纳于被腰部3的外壳配件包围起来的内侧的样子。
[0076]
接着,说明动作。
[0077]
图13是用于说明连结构造部5的动作的第1图,图13的(1)是腿部4位于标准位置时的腰部3周围的纵剖视图,图13的(2)是将连结构造部5的右侧部分机构简化表示的链接图。另外,在图13的(1)中,为了容易理解腰部3与腿部4之间的连结关系,仅图示了右腿部4,左腿部4也以相同的左右对称的位置关系与腰部3连结。
[0078]
在连结构造部5的腿连结轴571的顶端连结有设于腿部4的上端的大腿关节部41。大腿关节部41具有供腿连结轴571作为左右方向上的旋转轴插入的腿连结轴轴承部411和作为相对于腿连结轴571正交的正交轴的腿摆动轴412。腿连结轴571与腿摆动轴412之间的交点相当于图2和图3中的位移点pm。也就是说,腿部4相对于腰部3利用腿连结轴571能够沿着人形玩具2(参照图1)的上下前后面在前后方向上摆动,而且,利用腿摆动轴412能够沿着上下左右面上下摆动。
[0079]
在将本实施方式的连结构造部5机构简化时,形成有在4节滑块曲柄机构的摆动关节连结作为第5节的中间连杆57而成的5节打开连杆机构。
[0080]
即,在前后方向上组合起来的腰部前方半体51和腰部后方半体52(参照图11)作为第1节即固定连杆81发挥功能。而且,在前后方向上组合起来的前方曲柄半体55和后方曲柄半体56(参照图8)作为第2节即曲柄82发挥功能,连杆54作为第3节即连杆83发挥功能。连杆54的滑动销541与前方滑动槽511(参照图5)之间的卡合以及连杆54的滑动销541与后方滑动槽521(参照图6)之间的卡合作为第4节即滑块84发挥功能。而且,在中间连杆57中,由于曲柄销572(摆动关节)和腿连结轴571成为一体,因而作为第5节即腿连结杆85发挥功能。
[0081]
在腿部4位于标准位置时,在表述连结构造部5的4节滑块曲柄机构部分的状态时,利用滑块84使滑动销541位于滑动方向上端位置(图示的例子中,上止点位置)。这样的图13的状态相当于图1。在本实施方式中,由于滑块84的滑动方向上端位置以位于腰部3的内部结构的相对上部的方式设定,因此,在结果上,位于标准位置时的腿部4的上端部成为被拉入并容纳于被腰部3的外壳配件包围起来的内侧的状态。
[0082]
图14是用于说明连结构造部5的动作的第2图,表示左腿部4位于第1分开位置的状态。
[0083]
在腿部4位于第1分开位置时,在4节滑块曲柄机构部分的作用下,曲柄销572以主轴颈(前方主轴颈552+凸型中央主轴颈553+后方主轴颈562;参照图7)的前后方向轴线为中心向比标准位置靠下方、且自腰部3向左右方向移动。
[0084]
在腿部4位于第1分开位置时,在表述连结构造部5的4节滑块曲柄机构部分的状态时,利用滑块84使滑动销541位于比滑动方向上端位置靠下侧的位置。这样的图14的状态相当于图2。该状态下,腿部4的上端部保持为为被拉入并容纳于被腰部3的外壳配件包围起来的内侧的状态。另外,在图14的例子中,将第1分开位置的情况下的曲柄角表示为自上止点顺时针旋转的曲柄角45
°
左右且靠近下止点,但并不限定于此。还可以设为在曲柄角90
°
、曲
柄角135
°
等的情况下成为第1分开位置。
[0085]
图15是用于说明连结构造部5的动作的第3图。
[0086]
在腿部4位于第1分开位置的状态下,进一步以曲柄销572为轴使中间连杆57即腿连结轴571向下方摆动,在将腿连结轴571朝向腿打开时的腿部4的伸长方向时,腿部4的上端部从被腰部3的外壳配件包围起来的内侧拉出,成为腿部4看起来比位于标准位置时伸长的第2分开位置。这样的图15的状态相当于图3。
[0087]
因而,不仅能够由姿势的外观再现人形机器人英雄的电视动画片、漫画中经常看到的“一边动态地将腿部打开一边射击”的、所谓的“招牌姿势”、“亮相姿势”的场景,还能够再现从该姿势中感受到的印象(该情况下,由于打开的腿进行伸长而感受的气势和力度)。
[0088]
如上所述,在本实施方式所涉及的人形玩具2中,能够连同作为腰部3与腿部4之间的连接要素的曲柄销572(第1轴)位移到比通常的标准位置自腰部3分开的分开位置。也就是说,能够与使腿部4整体位移到自腰部2分开的位置的量相对应地,使腿部3看起来比通常长。因而,例如,不仅能够由姿势再现在人形机器人英雄的电视动画片、漫画中经常看到的“一边动态地将腿部打开一边射击”这样的招牌姿势的场景,还能够由人形玩具再现从该姿势感受到的印象(该情况下,由于打开的腿伸长而在视觉上感觉到的透视产生的气势和力度)。当然,若使腿部4返回到标准位置,则能够返回到与成为人形玩具2的模型的角色的本来的角色设定相同的腿的长度。
[0089]
而且,在本实施方式所涉及的人形玩具2中,分开位置从腰部4看位于比标准位置靠下方且是外侧的位置,因此,适合于再现将腿部4向斜下方伸长的姿势。
[0090]
而且,在本实施方式所涉及的人形玩具2中,标准位置位于被腰部3的外壳配件包围起来的内侧(即,腰部3的内部),分开位置为从被腰部3的外壳配件包围起来的内侧拉出的位置,因此,在腿部4位于标准位置的通常情况下也不会有损外观设计,能够内置连结构造部5。
[0091]
而且,在本实施方式所涉及的人形玩具2中,连结构造部5具有4节滑块曲柄型的闭合连杆构造,滑动方向设定为人形玩具2的上下方向,并且滑动范围的上端位置成为标准位置,因此,标准位置在结构上确定,因此,若将腿部4向腰部3靠近到可动的最大的范围,则该位置成为标准位置,因而在使姿势返回时较方便。而且,连结构造部5具有一端与曲柄销572连结、另一端与腿部4的大腿上端部的腿摆动轴412连结的腿连结轴571,并以在曲柄销572位于标准位置时腿连结轴571位于左右方向、在腿连结轴571位于分开位置时腿连结轴571位于上下方向的方式使腿连结轴571的姿势变化。即,通过将腿部4经由能够进一步沿着上下左右平面摆动的腿连结轴571与腰部3连结,从而将分开位置与腿连结轴571的量相对应地设为更远的位置,能够更明确地表现腿部3的伸长。
[0092]
〔变形例〕
[0093]
另外,本发明的实施方式并不限定于上述的例子,只要不变更发明的主旨,就能够适当地进行结构要素的追加、省略、变更。
[0094]
例如,在上述实施方式中,作为玩具的例子而列举了人形玩具,但并不限定于人形,只要是动物、鸟类、昆虫、甲壳类等以自身体突出的方式连结有可动部位的结构体,就能够应用本发明。
[0095]
而且,作为可动部位的例子,在上述实施方式中列举了腿,还能够根据玩具的设计
适当改变名称,例如臂、颈、炮筒、角、触角、传感器等。
[0096]
而且,作为位移方向的例子,例示了斜下方,当然,还可以是斜上方、斜前方、斜后方等。当然,作为正下方向,还能够再现“跳起并强有力地向上方飞起”这样的场景。为了再现假定的“招牌姿势”,能够适当设定使可动部位突出的方向。
[0097]
而且,分开位置处的腰部3与腿部4之间的相对位置关系并不限定于图2、图3所示的例子。例如,还可以将位移点pm设为比图2、图3所示的位置靠上方或靠下方的位置。分开距离也不限定于图2、图3所示的例子,能够根据连结构造部5的结构配件的尺寸设定适当设定。腿部4的打开方向也能够适当设定。
[0098]
附图标记说明
[0099]
2、人形玩具;3、腰部;30、侧部附件;31、腰部侧面外壳配件;32、腰部前表面外壳;33、上部附件;34、腰部右前外壳配件;35、腰部左前外壳配件;36、腰部背面外壳配件;4、腿部;41、大腿关节部;411、腿连结轴轴承部;412、腿摆动轴;5、连结构造部;51、腰部前方半体;511、前方滑动槽;512、前方主轴颈轴承孔;52、腰部后方半体;521、后方滑动槽;522、后方主轴颈轴承孔;53l、左方连杆曲柄连结体;53r、右方连杆曲柄连结体;54、连杆;541、滑动销;542、曲柄销轴承孔;55、前方曲柄半体;551、前方曲柄销轴承孔;552、前方主轴颈;553、凸型中央主轴颈;56、后方曲柄半体;561、后方曲柄销轴承孔;562、后方主轴颈;563、凹型中央主轴颈;57、中间连杆;571、腿连结轴;572、曲柄销;81、固定连杆;82、曲柄;83、连杆;84、滑块;85、腿连结杆;p0、基准点;pm、位移点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1