一种虚拟骑行模拟环境同步系统的制作方法
1.本发明涉及虚拟显示和运动设备领域,具体为一种虚拟骑行模拟环境同步系统。
背景技术:
2.目前,运动爱好者,特别是高速自行车运动爱好者,由于机动车辆和其他障碍物极易发生意外,自行车爱好者寻求一种危险减少,但运动的挑战保持不变的环境,这些自行车爱好者还希望通过在不同的地理环境中骑自行车来提高他们的安全而有趣的体验,他们觉得自己实际上是在这样的环境中锻炼。
3.现有的虚拟显示环境中骑行的系统与方法在对数据进行采集输入时,容易将数据信息填写错误,导致模拟环境不符合运动者的需求,以及在对自行车的相关数据进行测量时,仅依靠单一的传感器对运动数据进行测量,降低了模拟环境的模拟效果,以及无法对自行车的速度传感器的操作模式进行选择,使得计算方式固定化。另外目前市场上的自行车骑行虚拟模拟系统,都是两个单独的传感器向虚拟现实智能系统发送数据,这就会造成一个问题,由于单独传感器发送给虚拟现实智能系统的数据在不同的时间到达,可能会导致数据不同步,进而造成模拟系统实际反馈的数据与现实骑行数据不同步,极大的影响了骑行者的骑行体验。所以,人们需要一种虚拟骑行模拟环境同步系统来解决上述问题。
技术实现要素:
4.本发明的目的在于提供一种虚拟骑行模拟环境同步系统,以解决上述背景技术中提出的问题。
5.为了解决上述技术问题,本发明提供如下技术方案:一种虚拟骑行模拟环境同步系统,其特征在于:所述系统包括:数据采集模块、信息输入模块、信息数据处理模块和虚拟显示控制模块;
6.所述数据采集模块对速度传感器和路径传感器以及控制器的所测量数据信息进行采集后,输出采集的数据信息至信息输入模块;速度传感器对自行车运动的速度数据进行测量,路径传感器对自行车车把的转动情况进行测量,控制器获取实时用户输入,对用户希望在虚拟现实系统中执行什么动作进行测量,数据采集模块将测量的具体数据进行采集、处理,将其输送至信息输入模块。
7.所述信息输入模块输出采集的数据信息至信息数据处理模块;信息输入模块对采集的数据信息进行识别,在相应的数据位置进行填写。
8.所述信息数据处理模块通过速度传感器具有的标志属性对速度传感器的操作模式进行选择,对速度传感器采集的速度数据进行计算,对路径传感器采集的数据信息进行运算以及模数转换,并输出速度值和数字等效数据至虚拟显示控制模块;信息数据处理单元中速度计算公式存在速度模式和节奏模式两种模式,在对速度数据信息进行处理前需要对模式进行选择,运算单元和模数转换单元对电位器采集的数据信息进行处理,从而得到自行车的转动角度。
9.所述虚拟显示控制模块对速度值和数字等效数据进行分析,并输出自行车所处的虚拟环境,以及进行显示。例如,虚拟显示控制模块通过数据处理模块反馈的数据信息对骑行环境进行虚拟,并虚拟环境传输至虚拟显示控制模块例如虚拟显示头盔。
10.进一步的,当通信方式为ble方式时,所述数据采集模块在对传感器采集的数据信息进行传输时,根据属性协议,传感器需要发布服务,即它具有标准中定义的uuid码,然后对发布的uuid码进行比较,观察是否与特定的设备匹配连接以及确定需要的特征属性;属性协议包括uuid、句柄和属性值等,也规定了属性的读、写、通知等操作方法和细节,属性协议可以发现并获取传感器上的属性,数据采集模块在进行数据采集是需要对特定的传感器进行数据采集,当有多个传感器共同作用时,传感器需要对发布的uuid码进行识别后,数据采集模块才能对数据信息进行采集,uuid码是指从时间尺度和空间尺度都具有唯一性的一串128
‑
bit的数字,该数字串在全球范围内不会重复,并且在未来也不会出现重复,有利于数据采集模块对特定的传感器进行数据采集。
11.进一步的,所述信息输入模块在将速度传感器测量的速度传输至信息数据处理模块时,需要根据标准中定义的“骑行速度和节奏测量特征”以及测量速度数据的速度传感器具有的标志属性判断是否用于速度或节奏模式;信息输入模块通过速度传感器测量的数据对模式进行选择,对采集的数据进行整合记录。
12.进一步的,所述信息数据处理模块包括处理单元、模式判断单元、速度计算单元、运算单元、模数转换单元和信息数据更新单元;
13.所述处理单元对信息输入模块传输的数据信息进一步分析,并将相应的数据信息传输至模式判断单元、速度计算单元和运算单元,对传输的数据信息进行进一步的处理分析;处理单元将对应的数据信息分别传输至模式判断单元、速度计算单元和运算单元。
14.所述模式判断单元对速度传感器采集的信息进行分析,并将分析结果输送至速度计算单元,对速度传感器采集的信息进行模式判断;模式判断单元用于对传感器测量的是转轮转数或曲柄转数进行判断。
15.所述速度计算单元通过判断模式单元输出的判断结果选择对应的计算公式进行计算,对速度计算公式进行正确的选择,有利于对自行车的运行速度进行准确的计算;
16.在速度模式下,根据下列公式:
17.速度=(wheeldiff*(wheelsize/1000))/wheeltimediff;
18.其中表示当前传感器数据中车轮转数与车轮转数在前一传感器读取数据,wheelsize表示车轮尺寸,车轮尺寸表示车轮的周长,单位为毫米,wheeltimediff表示在发送当前传感器数据和在发送前一个传感器数据之前经过的时间;
19.在节奏模式下,根据下列公式:
20.曲柄转速=60000*time_delta_ms/转数;
21.其中time_delta_ms是当前通知运行时间与之前的通知运行时间,单位为毫秒,曲柄delta是当前曲柄数据与前一个曲柄的曲柄转数之差数据,60000*time_delta_ms表示将time_delta_ms的单位由毫秒转换为分钟,曲柄每分钟转数=时间分钟/转数;
22.所述运算单元对处理单元传输的转动电阻值进行进一步的计算,便于模数转换单元对转动电阻值直接进行作用,将其转化为等效数字,根据下列公式:
23.转动电阻值=当前传感器数据中的转动电阻值
‑
前一传感器数据中的转动电阻
值;
24.所述模数转换单元将运算单元处理后的转动电阻值进行数模转换;模数转换将转动电阻值转化为等效数字,通过等效数字的大小及所处范围得知自行车车把转动角度。
25.所述信息数据更新单元将速度计算单元和模数转换单元计算之后的数值以表格的形式进行记录,并将记录之后的数据反馈至处理单元;信息数据更新单元将更新后的数据传输至处理单元作为对比下一次传感器测量数据的对比数据。
26.进一步的,所述路径传感器需要配置单元来设置采样率,配置完成后,电位器与处理单元进行连接,从而确定读取间隔和可以计算平均读数,以确定电位器的电阻值,通过虚拟显示来确定方向系统;路径传感器对自行车的转动电阻值进行测量,并与处理单元进行连接对测量值进行处理。
27.进一步的,所述模式判断单元对速度传感器采集的信息进行分析,并将分析结果输送至速度计算单元,对速度传感器采集的信息判断相应的速度计算公式。
28.进一步的,当采样率为10时,平均读数的计算公式为:
29.路径传感器的平均读数=读数的总和
÷
样本总数;
30.总读数=r1+r2+r3+r4+r5+r6+r7+r8+r9+r10;
31.样本总数=10;
32.路径传感器平均读数=(r1+r2+r3+r4+r5+r6+r7+r8+r9+r10)
÷
10;
33.其中r1到r10是路径传感器的个别读数;
34.例如模数转换单元是10位时,分辨率范围为0
‑
1024,平均读数范围为0
‑
1024。
35.进一步的,所述虚拟现实系统包括虚拟现实系统、显示模块和控制器;
36.所述虚拟现实系统将信息数据更新单元传输的数据反馈至控制器;虚拟现实系统通过接收的信息数据更新单元的数据构建自行车的虚拟效果。
37.所述显示模块对虚拟现实系统反馈的信息进行显示。所述控制器:其中获取用户输入数据包括,向用户提供带有按钮的输入控制器,按下按钮时可生成输入数据;将输入数据发送到数据采集模块作进一步分析;
38.所述控制器具有反馈系统,对用户在虚拟现实系统中执行的动作给予触觉反馈;
39.处理单元接收来自虚拟现实系统的反馈数据,并对数据进行处理后发送给控制器进行反馈。
40.进一步的,所述虚拟现实系统将数据处理模块处理后的平均读数重新映射到虚拟自行车的较小角度范围内,车把通过下面的映射公式进行旋转:
41.remap=(sensorvalue
‑
reslowlimit)
÷
(resuperlimit
‑
reslowlimit)x(newupperlimit
‑
newlowlimit)+newlowlimit;
42.其中,sensorvalue表示处理单元计算得到的平均读数,reslowlimit为平均读数可以得到的最小值,resuperlimit为平均读数可以得到的最大值,newlowlimit表示虚拟自行车车面向最左边对应的映射值,newupperlimit表示虚拟自行车车面向最右边对应的映射值。
43.进一步的,所述速度传感器安装在自行车车轮的轮毂上,曲柄或自行车踏板上,所述路径传感器设置在模拟转向支撑装置,速度传感器安装在车轮的轮毂、自行车踏板或曲柄上,对测量的速度数据更加准确,路径传感器安装自行车前轮下面,具体在模拟转向支撑
装置测量效果最佳,。
44.进一步的,所述模数转换单元为模数转换器,用于确定数字等效电位器的匝电阻,采用模数转换器对转动电阻至进行数值等效,数据处理更为精确。
45.进一步的,自行车前轮安装在模拟转向支撑装置上,对自行车的前轮进行支撑,采集前轮的转动角度,后轮安装在自行车训练器上,采集后轮的转动速度,避免自行车在使用时发生位置移动,所述虚拟显示控制模块为vr眼镜,vr眼镜通过无线网络或有线网络中的一种连接方式与信息数据处理模块进行连接,无线网络连接方式可以是wifi、蓝牙和zigbee中的任意一种,更进一步的蓝牙可以是ble(低功耗蓝牙)方式便于vr眼镜与虚拟显示控制模块可以通过多种连接方式进行连接,便于使用者进行使用,将自行车所处的虚拟环境通过vr眼镜进行展示,将自行车放置在自行车训练器和模拟转向支撑装置上避免自行车在使用时发生位置移动,vr眼镜便于使用者进行更为直观的体验,安装在后轮上的传感器检测车速,对于前轮,在自行车的前轮下放置路径传感器,该装置为模拟转向支撑装置,当转向杆向左或向右移动时,位于该位置的传感器处于啮合状态,传感器将运动转换为可读输出,传感器捕捉骑自行车的人的实际动作,后轮速度传感器的输出被发送到前轮路径传感器,前轮路径传感器将速度传感器数据与它读取的用户转弯动作结合起来,然后将组合数据发送到信息数据处理模块。
46.连接方式也可以是有线方式,通过在模拟转向支撑装置上和vr眼镜、手机或者电脑上设置不同的有线方式接口,例如usb、hdmi、sata、dp、type
‑
c等从而将整个系统进行有线连接。在本发明中,路径传感器可以和数据采集模块、信息输入模块、信息数据处理模块一起设置在模拟转向支撑装置内,路径传感器可以直接有线和数据采集模块、信息输入模块、信息数据处理模块进行通信连接。本系统运作时,前轮置于模拟转向支撑装置上可以直接进行路径传感器进行转向杆的角度信息采集,后轮通过自行车后轮悬空支架撑起,在后轮轮毂或者脚踏板安装速度传感器,模拟现实控制模块可以是vr眼镜+手机,也可以直接是手机、电脑或者平板电脑,这些设备兼具控制器输入功能和显示功能,这些系统设备可以通过有线或者无线的方式连接,进而进行系统运转。
47.这种将路径传感器可以和数据采集模块、信息输入模块、信息数据处理模块一起设置在模拟转向支撑装置内,控制器也可以直接通过有线和模拟转向支撑装置连接,方便了数据的处理和采集,系统运行更加稳定,操作更加方便简单,制作成本也更加低廉。
48.与现有技术相比,本发明所达到的有益效果是:
49.1.本发明通过使用属性协议使传感器与特定的设备进行连接,避免将数据信息填写错误,保证模拟环境符合运动者的需求。
50.2.本发明通过速度传感器和路径传感器对自行车的相关数据进行测量,能够对自行车对速度信息和角度转动信息进行测量,避免依靠单一的传感器对运动数据进行测量,进一步提高了模拟环境的模拟效果。
51.3.本发明通过对速度传感器测量的数据判断速度传感器处于速度模式或节奏模式的操作下,从而对自行车的速度计算公式进行选择,计算方式多元化。
附图说明
52.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实
施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
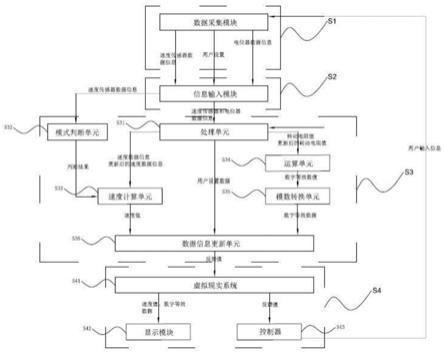
53.图1是本发明一种虚拟骑行模拟环境同步系统的数据处理示意图;
54.图2是本发明一种虚拟骑行模拟环境同步系统的自行车示意图;
55.图3是本发明一种虚拟骑行模拟环境同步系统的夜晚虚拟环境仿真示意图;
56.图4是本发明一种虚拟骑行模拟环境同步系统的白天虚拟环境仿真示意图。
具体实施方式
57.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
58.请参阅图1,本发明提供技术方案:一种虚拟骑行模拟环境同步系统,其特征在于:系统包括:数据采集模块s1、信息输入模块s2、信息数据处理模块s3和虚拟显示控制模块s4;骑手将速度传感器安装在自行车车轮的轮毂上,或自行车踏板上,对自行车的车速进行测量,将路径传感器安装在模拟转向支撑装置,更好的对自行车的转动电阻值进行测量,当转向杆向左或向右移动时,位于该位置的传感器处于啮合状态,传感器将运动转换为可读输出,传感器捕捉骑自行车的人的实际动作,后轮速度传感器的输出被发送到前轮路径传感器,前轮路径传感器将速度传感器数据与它读取的用户转弯动作结合起来,然后将组合数据发送到信息数据处理模块s3,路径传感器在使用时需要配置采样率,配置完成后,路径传感器与处理单元s31进行连接,从而读取间隔和平均读数,以确定电位器的电阻值,通过虚拟显示来确定方向系统,将自行车悬挂在固定的自行车训练器上,避免自行车在骑行过程中位置发生移动,带上vr眼镜,将骑行者置于虚拟显示环境中,骑行者在进行骑行时,速度传感器和路径传感器开始对自行车的速度和转动电阻值进行测量;
59.数据采集模块s1对速度传感器和路径传感器所测量的数据信息进行采集后,输出采集的数据信息至信息输入模块s2,数据采集模块s1在对速度传感器和路径传感器采集的数据信息进行传输时,在ble连接方式下,根据属性协议att,每一个传感器需要发布服务,即它具有标准中定义的uuid码,然后对发布的uuid码进行比较,观察是否与特定的设备匹配连接以及确定需要的特征属性,匹配成功后,数据采集模块s1对特定的传感器测量的数据进行采集;
60.信息输入模块s2输出采集的数据信息至信息数据处理模块s3,信息输入模块s2在将速度传感器测量的速度传输至信息数据处理模块s3时,需要根据gatt标准中定义的“骑行速度和节奏测量特征”以及测量速度数据的速度传感器具有的标志属性判断是否用于速度或节奏模式;
61.信息数据处理模块s3包括处理单元s31、模式判断单元s32、速度计算单元s33、运算单元s34、模数转换单元s35和信息数据更新单元s36,信息数据处理模块s3对速度传感器的速度信息进行模式判断,对速度传感器采集的速度数据进行计算,对路径传感器采集的数据信息进行运算以及模数转换,并输出速度值和数字等效数据至虚拟显示控制模块s4,处理单元s31对信息输入模块s2传输的数据信息进一步处理分析,并将相应的数据信息传输至速度计算单元s33和运算单元s34,模式判断单元s32对测量速度数据的速度传感器具有的标志属性进行分析,并将分析结果输送至速度计算单元s33,速度计算单元s33通过判断模式单元s32输出的判断结果选择对应的计算公式进行计算;
62.在速度模式下,根据下列公式:
63.速度=(wheeldiff*(wheelsize/1000))/wheeltimediff;
64.其中wheeldiff表示当前传感器数据中车轮转数与车轮转数在前一传感器读取数据,wheelsize表示车轮尺寸,车轮尺寸表示车轮的周长,单位为毫米,wheeltimediff表示在发送当前传感器数据和在发送前一个传感器数据之前经过的时间;速度=路程/时间,在该计算公式中的路程单位为米,wheelsize的单位为毫米,wheelsize/1000表示车轮尺寸单位由毫米转化为米,wheeldiff*(wheelsize/1000)用于计算出该段时间内自行车运动的总路程;
65.在节奏模式下,根据下列公式:
66.曲柄转速=60000*time_delta_ms/转数
67.其中time_delta_ms是当前通知运行时间与之前的通知运行时间,单位为毫秒,曲柄delta是当前曲柄数据与前一个曲柄的曲柄转数之差数据,60000*time_delta_ms表示将time_delta_ms的单位由毫秒转换为分钟,曲柄每分钟转数=时间分钟/转数;
68.速度计算单元s33对处理单元s31输送的数据信息带入进行计算后,准确的得出此时自行车的速度数值,在速度模式下,骑行者需提前对自行车车轮的尺寸进行测量,然后将具体数值带入公式进行计算;
69.运算单元s34对处理单元s31传输的转动电阻值进行进一步的计算,根据下列公式:
70.转动电阻值=当前传感器数据中的转动电阻值
‑
前一传感器数据中的转动电阻值;
71.运算单元s34将具体的数值带入计算公式,并将得出的数据结果输送至模数转换单元s35,公式中前一传感器数据中的转动电阻值表示上一时间段传感器所测量的数据,该数据存在于信息数据更新单元s36;
72.模数转换单元s35将运算单元s34处理后的转动电阻值进行数模转换,模数转换单元s35为模数转换器,用于确定数字等效电位器的匝电阻,从而对自行车转动的方向进行确定,信息数据更新单元s36将速度计算单元s33和模数转换单元s35计算之后的数值以表格的形式进行记录,并将记录之后的数据反馈至处理单元s31,信息数据更新单元s36对处理单元s31进行下一步的计算提供计算基础,保证自行车的运动信息在前一步的基础上进行改变;
73.当路径传感器的采样率为10时,平均读数的计算公式为:
74.路径传感器的平均读数=读数的总和
÷
样本总数;
75.总读数=r1+r2+r3+r4+r5+r6+r7+r8+r9+r10;
76.样本总数=10;
77.路径传感器平均读数=(r1+r2+r3+r4+r5+r6+r7+r8+r9+r10)
÷
10;
78.其中r1到r10是路径传感器的个别读数;
79.例如模数转换单元s35是10位时,分辨率范围为0
‑
1024,平均读数范围为0
‑
1024。
80.当使用程序代码进行计算时:
[0081][0082]
虚拟显示控制模块s4包括虚拟现实系统s41、显示模块s42和控制器s43,虚拟显示控制模块s4对速度值和数字等效数据进行分析,并输出自行车所处的虚拟环境,以及进行显示,虚拟现实系统s41将信息数据更新单元s36传输的数据反馈至控制器s43,显示模块s42为vr眼镜,用于对虚拟现实系统s41反馈的信息进行显示,控制器s43通过接收的反馈信息对虚拟显示环境进行控制;
[0083]
所述控制器s43:其中获取用户输入数据包括,向用户提供带有按钮的输入控制器,按下按钮时可生成输入数据;将输入数据发送到数据采集模块s2作进一步分析;
[0084]
所述控制器s43具有反馈系统,对用户在虚拟现实系统s41中执行的动作给予触觉反馈;
[0085]
处理单元s31接收来自虚拟现实系统s41的反馈数据,并对数据进行处理后发送给
控制器s43进行反馈。
[0086]
虚拟现实系统s41将数据处理模块s3处理后的平均读数重新映射到虚拟自行车的较小角度范围内,车把通过下面的映射公式进行旋转:
[0087]
remap=(sensorvalue
‑
reslowlimit)
÷
(resupperlimit
‑
reslowlimit)x(newupperlimit
‑
newlowlimit)+newlowlimit;
[0088]
其中,sensorvalue表示处理单元s31计算的平均值,定义newlowlimit和newupperlimit的取值分别为
‑
180和180,这意味着等效数字公式返回值为0,表示虚拟车把正对;返回值
‑
180表示车把面向最左边,180表示车把面向最右边,有了这些数值范围,车把可以准确定位。
[0089]
实施例一:
[0090]
例如,使用者在进行使用时,先将自行车的前轮放置在模拟转向支撑装置上,将自行车后轮放置在自行车训练器上,接着接通电源,然后将vr眼镜戴在眼睛上,接着根据使用者自身的需求对自行车踏板以不同的速度进行踩踏,在踩踏过程中安装在后轮轮毂上的速度传感器对车轮运行时所处的速度进行测量,安装在模拟转向支撑装置内的路径传感器对自行车车把所在的角度进行测量,当转向杆向左或向右移动时,位于该位置的路径传感器处于啮合状态,将转向杆的转动运动转换为可读输出,从而速度传感器和路径传感器能捕捉骑自行车的人的实际动作。后轮速度传感器的输出先被发送到前轮的路径传感器。前轮路径传感器将速度传感器数据与它读取的由路径传感器采集的用户转弯动作数据以及控制其输入的信息结合起来,将采集的速度信息和角度信息以及控制器s43的触觉等信息传递给虚拟同步系统进行处理,同步系统将处理后的信息通过蓝牙或usb数据线给传递vr眼镜,vr眼镜将接收到的信息进行显示,将使用者置于自己所创造的虚拟世界。
[0091]
其中速度传感器采用的是shenzhen coospo tech co.,ltd公司的bk6s
‑
034747型号的速度传感器,vr眼镜采用的是oculus公司的oculus quest2行号的vr眼镜,vr眼镜在使用时通过蓝牙或usb与同步系统进行连接,同时vr眼镜可以使用手机终端、ipad终端、电脑终端等进行替代。
[0092]
在vr软件中,sensorvalue表示处理单元s31计算的平均值,定义newlowlimit和newupperlimit的取值分别为
‑
180和180,这意味着等效数字公式返回值为0,表示虚拟车把正对;返回值
‑
180表示车把面向最左边,180表示车把面向最右边,有了这些数值范围,车把可以准确定位。我们需要将这些值重新映射到0到1024之间,我们可以使用这些值来转动车把。例如路径传感器的平均读数范围在0到1024之间,样本平均读数为136、281、572、421、742,在vr软件中,我们需要将这些值重新映射到
‑
180到180之间,我们可以使用这个值来转动车把。以公式重新映射最后一个读数742为例,具体如下:
[0093]
sensorvalue=742;
[0094]
reslowlimit=0;
[0095]
resupperlimit=1024;
[0096]
newlowlimit=
‑
180;
[0097]
newupperlimit=180;
[0098]
映射值=(742
‑
0)
÷
(1024
‑
0)
×
(180
‑
(
‑
180))+(
‑
180)=80.85。
[0099]
最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽
管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1