一种手摇式遥控玩具的制作方法
1.本发明涉及玩具技术领域,特别是涉及一种手摇式遥控玩具。
背景技术:
2.科技的进步促进了儿童玩具产业的发展,如今各种款式不同、功能各异的儿童玩具不仅给儿童的生活带来了不少乐趣,而且对于其早期的智力开发也是意义甚大。
3.而遥控玩具作为新一代的科技玩具,更是受到大众的欢迎。现有的遥控玩具通常包括遥控器和电动玩具,主要通过控制遥控器的遥控杆对电动玩具进行遥控;这类玩具当初数电动玩具车最为突出,然而,现有的遥控玩具大多通过控制遥控杆上下左右摆动进而控制电动玩具的动作方向,这类玩法比较单一,玩耍时单调乏味,趣味性和娱乐性不强。
技术实现要素:
4.基于此,本发明的目的在于克服现有技术的不足,提供一种手摇式遥控玩具,采用手摇控制的方式遥控玩具,其玩法新颖,互动性强,具有较强的娱乐性和趣味性。
5.为了实现上述目的,本发明采用的技术方案为:
6.一种手摇式遥控玩具,包括遥控器和玩具本体,所述遥控器包括手柄壳体、手摇杆和感应处理单元,所述手摇杆可转动地设置在手柄壳体上,所述感应处理单元设置在手柄壳体中,且用于感应手摇杆的转速信号并将所述转速信号转换处理成控制所述玩具本体工作的驱动信号;所述玩具本体包括主体部、设置在主体部中的接收驱动单元、变速驱动机构以及设计在主体部两侧的行走机构,所述接收驱动单元用于接收所述驱动信号并根据该驱动信号驱动所述变速驱动机构工作,所述变速驱动机构与所述行走机构传动连接。
7.作为一种实施方式,所述变速驱动机构包括驱动安装座、设置在驱动安装座上的驱动电机、设置在驱动电机输出端上的驱动齿轮、与驱动齿轮啮合连接的离合齿轮、加速齿轮、减速齿轮和输出齿轮,所述接收驱动单元与所述驱动电机驱动连接,所述离合齿轮可滑动地设置在驱动安装座上,所述加速齿轮和减速齿轮分别与所述输出齿轮啮合连接,所述输出齿轮与所述行走机构传动连接;
8.所述接收驱动单元用于接收所述驱动信号并根据接收到的驱动信号驱动所述驱动电机正向转动或反向转动,进而带动离合齿轮与所述加速齿轮或减速齿轮啮合连接。
9.作为一种实施方式,所述手摇杆包括可转动地设置在手柄壳体上的手摇转轴以及设置在手摇转轴两端的手把及转盘;所述手把位于手柄壳体的外侧,所述转盘位于手柄壳体的内侧,且转盘与所述感应处理单元相对设置;所述转盘与感应处理单元相对的一侧设有磁铁单元,所述感应处理单元设有用于检测磁铁单元转速的磁感应传感器;
10.所述手把带动转盘转动时,转盘上的磁铁单元同时被带动转动,所述磁感应传感器用于感应磁铁单元的转速信号,并将该转速信号输送至感应处理单元,经由感应处理单元处理成控制所述玩具本体工作的驱动信号。
11.作为一种实施方式,所述减速齿轮包括同轴刚性连接第一齿轮和第二齿轮,所述
第一齿轮的外径大于第二齿轮的外径,且所述第二齿轮与输出齿轮啮合连接;所述加速齿轮为单层齿轮结构,所述离合齿轮与驱动齿轮之间设有若干啮合连接的传动齿轮;当所述驱动电机正向转动时,所述离合齿轮滑动至减速齿轮并与减速齿轮的第一齿轮啮合连接;当所述驱动电机反向转动时,所述离合齿轮滑动至加速齿轮并与加速齿轮啮合连接。
12.作为一种实施方式,所述输出齿轮同轴刚性连接有输出转轴,所述输出转轴的两端分别伸出驱动安装座的两侧并同轴刚性连接有偏心轮,两个偏心轮的外圆周面上分别设有偏心轴;所述主体部的两内侧分别设有联动杆,两根联动杆分别设有与两个偏心轮的偏心轴相匹配的联动槽,且两个偏心轴分别设置在两根联动杆的联动槽上。
13.作为一种实施方式,所述两根联动杆上分别设有若干滑动槽,所述主体部的两侧分别设有与若干滑动槽相匹配的若干固定柱,每个滑动槽分别设置在相应的固定柱上;所述驱动电机带动输出齿轮转动,并通过输出齿轮两端的偏心轮分别带动两根联动杆的若干滑动槽在主体部两侧的若干固定柱上滑动。
14.作为一种实施方式,所述主体部的两侧分别设有轴承孔以及设置在轴承孔两侧的驱动槽和弧形槽,两根联动杆的外侧分别设有驱动轴,且两根驱动轴分别可滑动地设置在主体部两侧的驱动槽;两个行走机构与主体部相对的一侧分别设有转动轴以及设置在转动轴两侧的插孔和滑动柱,两个行走机构分别通过转动轴可转动地套设于主体部两侧的轴承孔中,且两根联动杆的驱动轴分别插入两个行走机构的插孔中,两个行走机构的滑动柱分别可滑动地设置在主体部两侧的弧形槽中。
15.作为一种实施方式,所述两个行走机构的底部分别设有若干车齿轮,且两个行走机构的底部分别设有可容纳若干车齿轮转动的槽体,每个车齿轮的轴两端分别可滑动地设置在相应的槽体两侧,且槽体的前端设有棘齿条;当车齿轮顺时针向前转动时,车齿轮的轴向远离棘齿条的一端滑动并使得车齿轮与棘齿条分离,当车齿轮逆时针向后转动时,车齿轮的轴向靠近棘齿条的一端滑动并使得棘齿条卡住车齿轮。
16.作为一种实施方式,所述主体部的前端设有头部,所述头部包括上壳体以及可转动设置在上壳体中的下壳体;所述输出齿轮啮合连接有头部偏心轮,所述头部偏心轮的一侧圆周面上设有偏心杆;所述主体部设有联动板,所述联动板设有横向槽以及间隔设置在横向槽上下两侧的纵向槽,所述偏心杆套设于所述横向槽上,两个纵向槽上分别设有导向柱,所述头部偏心轮转动时带动偏心杆在横向槽中滑动并使得联动板沿着纵向槽的导向柱上下移动;所述联动板的顶部设有滑槽部,所述上壳体可转动地设有联动盘,所述联动盘的外端通过一驱动杆设置在滑槽部中,且驱动杆上连接有驱动板,所述驱动板的另一端抵靠在下壳体上,所述联动板通过滑槽部带动驱动杆转动,进而带动驱动板下压并使得下壳体向上转动。
17.作为一种实施方式,所述主体部的两侧分别设有手部,两个手部分别可转动地设置在主体部上,且两个手部的一侧分别伸进主体部的内部并与两根联动杆固定连接;所述主体部的后端可转动地设有尾巴部,且两根联动杆的一端分别抵靠在所述尾巴部的前侧。
18.本发明所述的手摇式遥控玩具,采用摇动手摇杆的方式进行玩具本体的驱动控制模式,具体通过感应处理单元来感应手摇杆的转速信号,并将该转速信号转换处理成用于控制玩具本体工作的驱动信号;并且根据手摇杆的转动速率,感应处理单元可分别输出不同的驱动信号,配合玩具本体上的变速驱动机构,能够使得玩具本体具有不同的工作模式,
从而达到较强的互动效果,设计巧妙,玩法新颖,并且具有较强的娱乐性和趣味性。进一步地,本发明通过驱动电机带动两根联动杆移动,进而带动行走机构摆动,并在行走机构底部的车齿轮的转动配合下向前行走;同时通过两根联动杆带动头部、手部和尾巴部进行动作,从而达到模仿动物行走的动态效果,使得玩具的仿真度和娱乐性大大增强。
19.为了更好地理解和实施,下面结合附图详细说明本发明。
附图说明
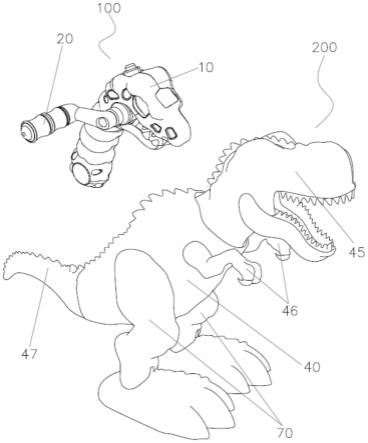
20.图1为本发明手摇式遥控玩具的结构示意图;
21.图2为本发明手摇式遥控玩具的遥控器的内部示意图;
22.图3为本发明手摇式遥控玩具的遥控器的分解示意图;
23.图4为本发明手摇式遥控玩具的玩具本体的内部结构示意图;
24.图5为本发明手摇式遥控玩具的玩具本体的另一内部结构示意图;
25.图6为本发明手摇式遥控玩具的联动杆与主体部之间的连接示意图;
26.图7为本发明手摇式遥控玩具的行走机构与主体部之间的连接示意图;
27.图8为本发明手摇式遥控玩具的行走机构的底部示意图;
28.图9为本发明手摇式遥控玩具的行走机构的内部结构示意图;
29.图10为本发明手摇式遥控玩具的变速驱动机构的结构示意图;
30.图11为本发明手摇式遥控玩具的变速驱动机构的分解示意图;
31.图12为本发明手摇式遥控玩具的变速驱动机构的另一分解示意图。
具体实施方式
32.为进一步说明各实施例,本发明提供有附图。这些附图为本发明揭露内容的一部分,其主要用以说明实施例,并可配合说明书的相关描述来解释实施例的运作原理。配合参考这些内容,本领域的普通技术人员应能理解其他可能得实施方式以及本发明的优点。
33.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“左”、“右”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解对本发明的限制。
34.请参阅图1至图12,图1为本发明手摇式遥控玩具的结构示意图;图2为本发明手摇式遥控玩具的遥控器的内部示意图;图3为本发明手摇式遥控玩具的遥控器的分解示意图;图4为本发明手摇式遥控玩具的玩具本体的内部结构示意图;图5为本发明手摇式遥控玩具的玩具本体的另一内部结构示意图;图6为本发明手摇式遥控玩具的联动杆与主体部之间的连接示意图;图7为本发明手摇式遥控玩具的行走机构与主体部之间的连接示意图;图8为本发明手摇式遥控玩具的行走机构的底部示意图;图9为本发明手摇式遥控玩具的行走机构的内部结构示意图;图10为本发明手摇式遥控玩具的变速驱动机构的结构示意图;图11为本发明手摇式遥控玩具的变速驱动机构的分解示意图;图12为本发明手摇式遥控玩具的变速驱动机构的另一分解示意图。
35.本实施例提供一种手摇式遥控玩具,包括遥控器100和玩具本体200,所述遥控器
100包括手柄壳体10、手摇杆20和感应处理单元30,所述手摇杆20可转动地设置在手柄壳体10上,所述感应处理单元30设置在手柄壳体10中,且用于感应手摇杆20的转速信号并将所述转速信号转换处理成控制所述玩具本体200工作的驱动信号;所述玩具本体200包括主体部40、设置在主体部40中的接收驱动单元50、变速驱动机构60以及设计在主体部40两侧的行走机构70,所述接收驱动单元50用于接收所述驱动信号并根据该驱动信号驱动所述变速驱动机构60工作,所述变速驱动机构60与所述行走机构70传动连接。
36.具体地,所述变速驱动机构60包括驱动安装座61、设置在驱动安装座61上的驱动电机62、设置在驱动电机62输出端上的驱动齿轮63、与驱动齿轮63啮合连接的离合齿轮64、加速齿轮65、减速齿轮66和输出齿轮67,所述接收驱动单元50与所述驱动电机62驱动连接,所述离合齿轮64可滑动地设置在驱动安装座61上,所述加速齿轮65和减速齿轮66分别与所述输出齿轮67啮合连接,所述输出齿轮67与所述行走机构70传动连接;其中,所述接收驱动单元50用于接收所述驱动信号并根据接收到的驱动信号驱动所述驱动电机62正向转动或反向转动,进而带动离合齿轮64与所述加速齿轮65或减速齿轮66啮合连接。
37.可选地,所述驱动齿轮63与离合齿轮64之间可设置若干传动齿轮68作为中间连接的齿轮,从而方便安装驱动电机62和离合齿轮63。
38.可选地,所述手摇杆20包括可转动地设置在手柄壳体10上的手摇转轴21以及设置在手摇转轴21两端的手把22及转盘23;所述手把22位于手柄壳体10的外侧,所述转盘23位于手柄壳体10的内侧,且转盘23与所述感应处理单元30相对设置;所述转盘23与感应处理单元30相对的一侧设有磁铁单元24,所述感应处理单元30设有用于检测磁铁单元24转速的磁感应传感器31;
39.当所述手把22带动转盘23转动时,转盘23上的磁铁单元24同时被带动转动,所述磁感应传感器31用于感应磁铁单元24的转速信号,并将该转速信号输送至感应处理单元30,经由感应处理单元30处理成控制所述玩具本体200工作的驱动信号。其中,所述磁感应传感器31为霍尔传感器。
40.可选地,所述减速齿轮66包括同轴刚性连接第一齿轮和第二齿轮,所述第一齿轮的外径大于第二齿轮的外径,且所述第二齿轮与输出齿轮67啮合连接;所述加速齿轮65为单层齿轮结构,所述离合齿轮64与驱动齿轮63之间设有若干啮合连接的传动齿轮;当所述驱动电机62正向转动时,所述离合齿轮64滑动至减速齿轮66并与减速齿轮66的第一齿轮啮合连接;当所述驱动电机62反向转动时,所述离合齿轮64滑动至加速齿轮65并与加速齿轮65啮合连接。
41.由此,本实施例的手摇式遥控玩具通过手握手柄壳体10,另一只手抓住手摇杆20进行转动便可带动转盘23转动,进而通过磁感应传感器31来感应转盘23上的磁铁单元24的转速信号,并将感应到的转速信号输送至感应处理单元30,由感应处理单元30转换处理后向玩具本体200中的接收驱动单元50发出相应的驱动信号,接收驱动单元50接收该驱动信号之后,进而驱动所述驱动电机62转动。
42.进一步地,本实施例的手摇杆20的转速可以分为低、中、高三个档位的转速信号,通过在感应处理单元30设置低、中、高三个档位的转速阈值。
43.当手摇杆20进行低速转动时,磁感应传感器31将此时感应到的转速信号发送至感应处理单元30,经由感应处理单元30转换并与低、中、高三个档位的转速阈值进行比对后,
向接收驱动单元50发出驱动电机62正向转动的驱动信号,接收驱动单元50接收到该驱动信号后,便可驱动所述驱动电机62进行正向转动,此时,驱动电机62输出端的驱动齿轮63正向转动并带动离合齿轮64滑动至减速齿轮66并与减速齿轮66的第一齿轮啮合连接,继而通过减速齿轮66带动输出齿轮67进行低速转动,最终使得行走机构70的行走速率为低速行走。
44.同理,当手摇杆20进行中速转动时,磁感应传感器31将此时感应到的转速信号发送至感应处理单元30,经由感应处理单元30转换并与低、中、高三个档位的转速阈值进行比对后,向接收驱动单元50发出驱动电机62反向转动的驱动信号,接收驱动单元50接收到该驱动信号后,便可驱动所述驱动电机62进行反向转动,此时,驱动电机62输出端的驱动齿轮63反向转动并带动离合齿轮64滑动至加速齿轮65并与加速齿轮65啮合连接,继而通过加速齿轮65带动输出齿轮67进行中速转动,最终使得行走机构70的行走速率为中速行走。继续加快手摇杆20的转动速度使得感应处理单元30接收到的转速信号超过高转速阈值时,此时感应处理单元30将发出驱动电机62高频反向转动的驱动信号,进而通过接收驱动单元50带动驱动电机62进行高频反向转动,并最终使得行走机构70的行走速率为高速行走。
45.其中,为了增加遥控器100的节奏感,本实施例的转盘23为转动齿轮,在手柄壳体10的内部设有长条板14,所述长条板14的末端位于转动齿轮的外齿上,这样一来,当转动齿轮进行转动时,转动齿轮的外齿将不停触碰并顶开长条板14,从而产生“哒哒哒”的音乐效果,用户也可通过手摇杆20的手把22感受到转动齿轮与长条板14之间的碰撞节奏。
46.可选地,所述手柄壳体10上还可设置指示灯11,并且手柄壳体10内设有遥控电源12和遥控开关13,这样一来,遥控电源12、遥控开关13和感应处理单元30和指示灯11形成电连接,当遥控开关13开启时,指示灯11点亮。
47.另外,本实施例的所述输出齿轮67同轴刚性连接有输出转轴,所述输出转轴的两端分别伸出驱动安装座61的两侧并同轴刚性连接有偏心轮671,两个偏心轮671的外圆周面上分别设有偏心轴672;所述主体部40的两内侧分别设有联动杆80,两根联动杆80分别设有与两个偏心轮671的偏心轴672相匹配的联动槽81,且两个偏心轴672分别设置在两根联动杆80的联动槽81上。
48.进一步地,所述两根联动杆80上分别设有若干滑动槽83,所述主体部40的两侧分别设有与若干滑动槽83相匹配的若干固定柱44,每个滑动槽83分别设置在相应的固定柱44上;所述驱动电机62带动输出齿轮67转动,并通过输出齿轮67两端的偏心轮671分别带动两根联动杆80的若干滑动槽83在主体部40两侧的若干固定柱44上滑动。
49.可选地,所述主体部40的两侧分别设有轴承孔41以及设置在轴承孔41两侧的驱动槽42和弧形槽43,两根联动杆80的外侧分别设有驱动轴82,且两根驱动轴82分别可滑动地设置在主体部40两侧的驱动槽42;两个行走机构70与主体部40相对的一侧分别设有转动轴71以及设置在转动轴71两侧的插孔72和滑动柱73,两个行走机构70分别通过转动轴71可转动地套设于主体部40两侧的轴承孔41中,且两根联动杆80的驱动轴82分别插入两个行走机构70的插孔72中,两个行走机构70的滑动柱73分别可滑动地设置在主体部40两侧的弧形槽43中。
50.由此,当输出齿轮67两端的偏心轮671分别带动两根联动杆80在主体部40上往复滑动时,两根联动杆80的驱动轴82由于插入两个行走机构70的两个插孔72中,这样一来,两个行走机构70以其转动轴71为转动支点,在两根联动杆80的带动下,通过滑动柱73在主体
部40的弧形槽43中滑动,进而实现两个行走机构70摆动的动态效果。
51.进一步地,所述两个行走机构70的底部分别设有若干车齿轮74,且两个行走机构70的底部分别设有可容纳若干车齿轮74转动的槽体,每个车齿轮74的轴两端分别可滑动地设置在相应的槽体两侧,且槽体的前端设有棘齿条75;当车齿轮74顺时针向前转动时,车齿轮74的轴向远离棘齿条75的一端滑动并使得车齿轮74与棘齿条75分离,当车齿轮74逆时针向后转动时,车齿轮74的轴向靠近棘齿条75的一端滑动并使得棘齿条75卡住车齿轮74。
52.由此,当其中一个行走机构70向前摆动时,向前摆动的行走机构70上的若干车齿轮74顺时针向前转动,车齿轮74的轴向远离棘齿条75的一端滑动并使得车齿轮74与棘齿条75分离,从而使得向前摆动的行走机构70的若干车齿轮74向前转动;同时,另一个行走机构70这时向后摆动,向后摆动的行走机构70上的若干车齿轮74逆时针向后转动,车齿轮74的轴向靠近棘齿条75的一端滑动并使得棘齿条75卡住车齿轮74,从而使得向后摆动的行走机构70的若干车齿轮74卡住不动。并且在两根联动杆80的往复作用下,两个行走机构70依次交替向前摆动,并通过向前摆动的行走机构70的若干车齿轮74获得向前行走的动力。
53.并且,采用这样的结构设计,无论驱动电机62正向转动或方向转动,只要两个行走机构70一前一后地进行摆动,便可通过两个行走机构70底部的车齿轮74一直保持向前走动的方向,而不会发生倒退行走的现象。可选地,本实施例的两个行走机构70底部的前端分别设有两个并列的车齿轮74,其后端设有一个车齿轮74。
54.可选地,所述主体部40的前端设有头部45,所述头部45包括上壳体以及可转动设置在上壳体中的下壳体;所述输出齿轮67啮合连接有头部偏心轮69,所述头部偏心轮69的一侧圆周面上设有偏心杆691;所述主体部40设有联动板90,所述联动板90设有横向槽91以及间隔设置在横向槽91上下两侧的纵向槽92,所述偏心杆691套设于所述横向槽91上,两个纵向槽92上分别设有导向柱,所述头部偏心轮69转动时带动偏心杆691在横向槽91中滑动并使得联动板90沿着纵向槽92的导向柱上下移动;所述联动板90的顶部设有滑槽部93,所述上壳体可转动地设有联动盘94,所述联动盘94的外端通过一驱动杆设置在滑槽部93中,且驱动杆上连接有驱动板95,所述驱动板95的另一端抵靠在下壳体上,所述联动板90通过滑槽部93带动驱动杆转动,进而带动驱动板95下压并使得下壳体向上转动。
55.另外,所述主体部40的两侧分别设有手部46,两个手部46分别可转动地设置在主体部40上,且两个手部46的一侧分别伸进主体部40的内部并与两根联动杆80固定连接;所述主体部40的后端可转动地设有尾巴部47,且两根联动杆80的一端分别抵靠在所述尾巴部47的前侧。
56.可选地,本实施例的玩具本体200模仿恐龙的造型,所述主体部40为恐龙的躯体部,两个行走机构70为恐龙的下腿部,由此,当两根联动杆80分别一前一后地移动时,两个手部46相应地也一前一后地转动,同时尾巴部47也能实现左右摇摆的动态效果,这样一来,本实施例的仿真电动玩具便能形象生动地模仿恐龙行走、嘴巴张合、手部46转动和摇尾巴等动作,仿真效果非常逼真,同时具有丰富的动态效果,使得玩具的娱乐性和趣味性大大增加。
57.其中,所述玩具本体200还包括驱动电源48、驱动开关49、灯光组件和音乐组件,所述驱动电源48、驱动开关49分别与灯光组件、音乐组件、接受驱动单元和驱动电机62形成电连接。在本实施例中,所述驱动电源48设置在行走机构70的底部内,这样一来还可增加行走
机构70的重量,从而使得行走机构70在行走的过程中重心更低;所述灯光组件包括若干个led灯珠,可分别设置在头部45或其它部位,音乐组件包括音乐基板和扬声器,所述扬声器设置在主体部40的底部,并通过音乐基板驱动发生声音。
58.与现有技术相比,本发明所述的手摇式遥控玩具,采用摇动手摇杆20的方式进行玩具本体200的驱动控制模式,具体通过感应处理单元30来感应手摇杆20的转速信号,并将该转速信号转换处理成用于控制玩具本体200工作的驱动信号;并且根据手摇杆20的转动速率,感应处理单元30可分别输出不同的驱动信号,配合玩具本体200上的变速驱动机构60,能够使得玩具本体200具有不同的工作模式,从而达到较强的互动效果,设计巧妙,玩法新颖,并且具有较强的娱乐性和趣味性。进一步地,本发明通过驱动电机62带动两根联动杆80移动,进而带动行走机构70摆动,并在行走机构70底部的车齿轮74的转动配合下向前行走;同时通过两根联动杆80带动头部45、手部46和尾巴部47进行动作,从而达到模仿动物行走的动态效果,使得玩具的仿真度和娱乐性大大增强。
59.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明手摇式遥控玩具范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1