一种微型机器人骨架结构的制作方法
1.本发明涉及机器人玩具技术领域,尤其涉及一种微型机器人骨架结构。
背景技术:
2.现有的仿人型结构的微型机器人由于生产加工技术的限制,导致各个关节的可活动的自由度较低,且各个关节在进行掰扯弯折进行变形之后不容易保持变形后的状态。
技术实现要素:
3.本发明的目的在于针对背景技术中的缺陷,提出一种微型机器人骨架结构,本发明在前夹片和后夹片之间设置安装间隙,前夹片和后夹片的板面分别向外凸起,以使所述安装间隙对应凸起处形成活动腔体,在关节连接轴的连接端设置滑动球体,将滑动球体活动安装于活动腔体,以提高各形体安装件之间的关节自由度;
4.本发明通过在前夹片和后夹片设置固定孔洞,利用铆钉进行固定,以确保关节连接轴稳固安装于前夹片和后夹片之间的活动腔体,同时在前夹片和后夹片设置注塑孔洞,在进行注塑时便于注塑材料从注塑孔洞进入安装间隙,以使滑动球体在活动腔体活动时,能够保障各形体安装件在掰扯变形之后,还能维持变形后的形态。
5.为达此目的,本发明采用以下技术方案:
6.一种微型机器人骨架结构,包括多个不同仿型结构的形体安装件,所述形体安装件分别包括躯干部、肩胛部、手臂部、胸腔部、腹股部和腿部;各所述形体安装件之间通过关节连接轴连接固定;
7.所述肩胛部、胸腔部和腹股部均通过各自的仿型结构的前夹片和后夹片夹装形成;
8.所述肩胛部、胸腔部和腹股部所对应的所述前夹片和后夹片之间留存有安装间隙,所述前夹片和后夹片的板面分别向外凸起,以使所述安装间隙对应凸起处形成活动腔体;
9.通过将关节连接轴的连接端活动安装于所述活动腔体以实现不同仿型结构的形体安装件之间的连接。
10.优选的,所述前夹片和所述后夹片均设置有相互对应的固定孔洞和注塑孔洞;
11.通过紧固件穿过所述固定孔洞以将所述前夹片与所述后夹片固定;
12.所述固定孔洞的孔径大于所述注塑孔洞的孔径。
13.优选的,所述躯干部包括第一躯干连接轴、第二躯干连接轴;
14.所述第一躯干连接轴设置有躯干节点,所述第二躯干连接轴设置有躯干凹槽,所述躯干节点嵌入所述躯干凹槽以将所述第一躯干连接轴固定于所述第二躯干连接轴;
15.所述躯干节点可在所述躯干凹槽内摆动以使所述第一躯干连接轴相对于第二躯干连接轴发生摆动。
16.优选的,所述躯干部还包括躯干关节连接轴;
17.所述胸腔部设置有胸腔第一活动腔体和胸腔第二活动腔体;
18.所述腹股部设置有腹股第一活动腔体;
19.所述第二躯干连接轴设置有滑动球体,所述第二躯干连接轴的所述滑动球体安装于所述胸腔部的胸腔第一活动腔体;
20.所述躯干关节连接轴的两个连接端分别设置有所述滑动球体,所述关节连接轴的一滑动球体安装于所述胸腔部的胸腔第二活动腔体,另一滑动球体安装于所述腹股部的腹股第一活动腔体。
21.优选的,所述肩胛部设置有肩胛第一活动腔体和肩胛第二活动腔体;
22.所述胸腔部还包括胸腔第三活动腔体和胸腔关节连接轴;
23.所述胸腔关节连接轴的两个连接端分别设置有所述滑动球体,所述胸腔关节轴的一滑动球体安装于所述胸腔第三活动腔体,另一球体安装于所述肩胛第二活动腔体;
24.所述肩胛部通过所述肩胛第一活动腔体连接所述手臂部。
25.优选的,所述手臂部包括手臂关节连接轴、第一手臂连接轴和第二手臂连接轴;
26.所述手臂关节连接轴一端设置有所述滑动球体,另一端设置有手臂节点;
27.所述第一手臂连接轴的两端分别设置有手臂凹槽;
28.所述第二手臂连接轴设置有所述手臂节点;
29.所述手臂关节连接轴的所述滑动球体安装于所述肩胛第一活动腔体;
30.所述手臂关节连接轴的手臂节点嵌入安装于所述第一手臂连接轴的一手臂凹槽,以将所述手臂关节连接轴固定于所述第一手臂连接轴,所述第一手臂连接轴可相对于所述手臂关节连接轴发生摆动;
31.所述第二手臂连接轴的手臂节点嵌入安装于所述第一手臂连接轴的另一手臂凹槽,以将所述第一手臂连接轴固定于所述第二手臂连接轴,所述第二手臂连接轴可相对于所述第一手臂连接轴发生摆动。
32.优选的,所述第二手臂连接轴包括两个分臂轴,所述分臂轴的一端设置有所述滑动球体,另一端设置有滑槽;
33.两个分臂轴的滑动球体各自滑动安装于对方的滑槽内。
34.优选的,所述腿部包括腿部关节连接轴和大腿连接轴;
35.所述大腿连接轴设置有腿部第一活动腔体;
36.所述腿部关节连接轴的两个连接端分别设置有所述滑动球体,其中一滑动球体嵌入安装于所述腹股部的腹股第二活动腔体,另一滑动球体嵌入安装于所述腿部第一活动腔体。
37.优选的,所述腿部还包括小腿连接轴;
38.所述小腿连接轴设置有腿部节点;
39.所述大腿连接轴设置有腿部凹槽;
40.所述腿部节点嵌入安装于所述腿部凹槽,以将所述小腿连接轴固定于所述大腿连接轴,所述小腿连接轴可相对于所述大腿连接轴发生摆动。
41.本技术的技术方案所产生的有益效果:
42.1、本发明在前夹片和后夹片之间设置安装间隙,前夹片和后夹片的板面分别向外凸起,以使所述安装间隙对应凸起处形成活动腔体,在关节连接轴的连接端设置滑动球体,
将滑动球体活动安装于活动腔体,以提高各形体安装件之间的关节自由度;
43.2、本发明通过在前夹片和后夹片设置固定孔洞,利用铆钉进行固定,以确保关节连接轴稳固安装于前夹片和后夹片之间的活动腔体,同时在前夹片和后夹片设置注塑孔洞,在进行注塑时便于注塑材料从注塑孔洞进入安装间隙,以使滑动球体在活动腔体活动时,能够保障各形体安装件在掰扯变形之后,还能维持变形后的形态。
附图说明
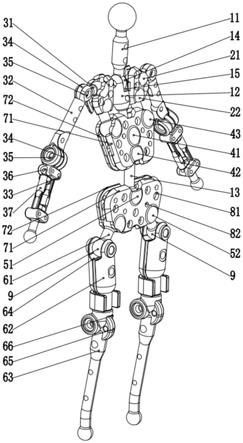
44.图1是本发明的一个实施例的微型机器人骨架结构正视图;
45.图2是本发明的一个实施例的微型机器人骨架结构示意图;
46.图3是本发明的一个实施例的躯干部结构示意图;
47.图4是本发明的一个实施例的肩胛部和手臂部的结构示意图;
48.图5是本发明的一个实施例的胸腔部和腹股部的结构示意图;
49.图6是本发明的一个实施例的腿部结构示意图。
50.其中:躯干部1、第一躯干连接轴11、第二躯干连接轴12、躯干关节连接轴13、躯干节点14、躯干凹槽15、肩胛部2、肩胛第一活动腔体21、肩胛第二活动腔体22、手臂部3、手臂关节连接轴31、第一手臂连接轴32、第二手臂连接轴33、手臂节点34、手臂凹槽35、分臂轴36、滑槽37、胸腔部4、胸腔第一活动腔体41、胸腔第二活动腔体42、胸腔第三活动腔体43、腹股部5、腹股第一活动腔体51、腹股第二活动腔体52、腿部6、腿部关节连接轴61、大腿连接轴62、小腿连接轴63、腿部第一活动腔体64、腿部节点65、腿部凹槽66、前夹片71、后夹片72、固定孔洞81、注塑孔洞82、滑动球体9。
具体实施方式
51.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
52.在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
53.现有的仿人型结构的微型机器人由于生产加工技术的限制,导致各个关节的可活动的自由度较低,且各个关节在进行掰扯弯折进行变形之后不容易保持变形后的状态、为了解决上述问题,本技术提出一种微型机器人骨架结构,需要说明的是,本技术的微型机器人骨架结构采取设计粉末冶金注射成型,采取粉末冶金注射成型、脱脂、烧结、磁力研磨抛光和整形等加工工艺制造本技术所述的微型机器人骨架结构,同时微型机器人骨架结构用于后续注塑包硅胶成最终的玩具产品。
54.具体的,包括多个不同仿型结构的形体安装件,所述形体安装件分别包括躯干部1、肩胛部2、手臂部3、胸腔部4、腹股部5和腿部6;各所述形体安装件之间通过关节连接轴连接固定;
55.所述肩胛部2、胸腔部4和腹股部5均通过各自的仿型结构的前夹片71和后夹片72夹装形成;
56.所述肩胛部2、胸腔部4和腹股部5所对应的所述前夹片71和后夹片72之间留存有
安装间隙,所述前夹片71和后夹片72的板面分别向外凸起,以使所述安装间隙对应凸起处形成活动腔体;
57.通过将关节连接轴的连接端活动安装于所述活动腔体以实现不同仿型结构的形体安装件之间的连接。
58.在本实施例中,所述微型机器人骨架结构由多个不同仿型结构的形体安装件组装而成,这些形体安装部根据仿人型设计分别为躯干部1、肩胛部2、手臂部3、胸腔部4、腹股部5和腿部6,上述各部位均通过关节连接轴进行连接固定,以此来实现各部位拼装形成完整的机器人骨架;
59.进一步的,所述肩胛部2、所述胸腔部4和所述腹股部5均通过各自的仿型结构的前夹片71和后夹片72夹装形成,前夹片71和后夹片72之间留存一个安装间隙,同时前夹片71和后夹片72的板面会朝向远离安装间隙得方向凸起,使得所述安装间隙对应凸起处形成活动腔体,在进行各个部位的连接时,只需将关节连接轴的连接端置入所述活动腔体内,同时关节连接轴的连接端还可以在活动腔体内进行小幅度的活动,利用关节连接轴的连接端和活动腔体之间的摩擦,来保证各部位通过关节连接轴进行掰扯变形之后,还能维持变形后的形态。
60.优选的,所述前夹片71和所述后夹片72均设置有相互对应的固定孔洞81和注塑孔洞82;
61.通过紧固件穿过所述固定孔洞81以将所述前夹片71与所述后夹片72固定;
62.所述固定孔洞81的孔径大于所述注塑孔洞82的孔径。
63.在本实施例中,所述肩胛部2、胸腔部4和腹股部5均通过前夹片71和后夹片72夹装形成,其中,可以通过紧固件穿过固定孔洞81来将前夹片71和后夹片72进行固定,需要注意的是,在进行固定的时候,需要保证前夹片71和后夹片72之间留存有安装间隙;
64.进一步的,在所述前夹片71和后夹片72的板面还分散设置有注塑孔洞82,在后续对本技术的微型机器人骨架进行注塑硅胶形成产品时,注塑材料可通过注塑孔洞82进入安装间隙,使得安装间隙充满注塑材料,同时前夹片71和后夹片72的外围包裹有注塑材料,利用注塑孔洞82和安装间隙的配合进行注塑,在保障前夹片71和后夹片72稳固的同时,还能防止前夹片71和后夹片72发生位移偏差,保证各部位通过关节连接轴进行掰扯变形之后,还能维持变形后的形态。
65.下文将以具体实施例阐述各形体安装件之间的连接关系。
66.优选的,所述躯干部1包括第一躯干连接轴11、第二躯干连接轴12;
67.所述第一躯干连接轴11设置有躯干节点14,所述第二躯干连接轴12设置有躯干凹槽15,所述躯干节点14嵌入所述躯干凹槽15以将所述第一躯干连接轴11固定于所述第二躯干连接轴12;
68.所述躯干节点14可在所述躯干凹槽15内摆动以使所述第一躯干连接轴11相对于第二躯干连接轴12发生摆动。
69.在本实施例中,所述第一躯干连接轴11的一端可以被理解为头部安装端,另一端设置有躯干节点14,所述第二躯干连接轴12设置有躯干凹槽15,将所述第一躯干连接轴11的躯干节点14插入所述第二躯干连接轴12的躯干凹槽15内,同时所述躯干节点14和所述躯干凹槽15的槽壁均开设有槽孔,通过将铆钉插入槽孔内,可以实现两者之间的固定,并且所
述第一躯干连接轴11可以绕铆钉转动以实现相对于第二躯干连接轴12的前后方向摆动。
70.优选的,所述躯干部1还包括躯干关节连接轴13;
71.所述胸腔部4设置有胸腔第一活动腔体41和胸腔第二活动腔体42;
72.所述腹股部5设置有腹股第一活动腔体51;
73.所述第二躯干连接轴12设置有滑动球体9,所述第二躯干连接轴12的所述滑动球体9安装于所述胸腔部4的胸腔第一活动腔体41;
74.所述躯干关节连接轴13的两个连接端分别设置有所述滑动球体9,所述关节连接轴的一滑动球体9安装于所述胸腔部4的胸腔第二活动腔体42,另一滑动球体9安装于所述腹股部5的腹股第一活动腔体51。
75.在本实施例中,所述第二躯干连接轴12设置有滑动球体9,滑动球体9可以置入所述胸腔第一活动腔体41,从而实现将第二躯干连接轴12与所述胸腔部4的连接固定,同时所述滑动球体9可以再所述胸腔第一活动腔体41内进行多自由度的转动,从而实现躯干部1相对于胸腔部4的摆动;
76.进一步的,所述躯干部1还包括躯干关节连接轴13,所述躯干关节连接轴13用于连接所述胸腔部4和腹股部5,所述躯干关节连接轴13的两端的滑动球体9分别连接所述胸腔第二活动腔体42和腹股第一活动腔体51,从而实现胸腔部4和腹股部5之间的固定以及两者之间的相对摆动幅度。
77.优选的,所述肩胛部2设置有肩胛第一活动腔体21和肩胛第二活动腔体22;
78.所述胸腔部4还包括胸腔第三活动腔体43和胸腔关节连接轴;
79.所述胸腔关节连接轴的两个连接端分别设置有所述滑动球体9,所述胸腔关节轴的一滑动球体9安装于所述胸腔第三活动腔体43,另一球体安装于所述肩胛第二活动腔体22;
80.所述肩胛部2通过所述肩胛第一活动腔体21连接所述手臂部3。
81.在本实施例中,所述肩胛部2、手臂部3是左右对称设置的,因此本技术以其中一边结构进行阐述;具体的,所述胸腔关节连接轴的两个连接端同样设置有滑动球体9,其中一个滑动球体9安装于肩胛第二活动腔体22,另一个滑动球体9安装于胸腔第三活动腔体43,从而实现肩胛部2与胸腔部4的连接固定,同时也实现了肩胛部2可以相对于胸腔部4的彼此摆动;
82.进一步的,所述手臂部3则通过所述肩胛第一活动腔体21实现与肩胛部2的连接固定和摆动。
83.优选的,所述手臂部3包括手臂关节连接轴31、第一手臂连接轴32和第二手臂连接轴33;
84.所述手臂关节连接轴31一端设置有所述滑动球体9,另一端设置有手臂节点34;
85.所述第一手臂连接轴32的两端分别设置有手臂凹槽35;
86.所述第二手臂连接轴33设置有所述手臂节点34;
87.所述手臂关节连接轴31的所述滑动球体9安装于所述肩胛第一活动腔体21;
88.所述手臂关节连接轴31的手臂节点34嵌入安装于所述第一手臂连接轴32的一手臂凹槽35,以将所述手臂关节连接轴31固定于所述第一手臂连接轴32,所述第一手臂连接轴32可相对于所述手臂关节连接轴31发生摆动;
89.所述第二手臂连接轴33的手臂节点34嵌入安装于所述第一手臂连接轴32的另一手臂凹槽35,以将所述第一手臂连接轴32固定于所述第二手臂连接轴33,所述第二手臂连接轴33可相对于所述第一手臂连接轴32发生摆动。
90.在本实施例中,所述手臂关节连接轴31的一端设置有滑动球体9,该滑动球体9安装于肩胛第一活动腔体21,从而实现手臂关节连接轴31与肩胛部2的固定和相对摆动;
91.进一步的,所述手臂关节连接轴31的另一端设置有手臂节点34,手臂节点34可插入所述第一手臂连接轴32其中一个手臂凹槽35,从而实现手臂关节连接轴31和第一手臂连接轴32之间的固定和相对摆动;
92.更进一步的,所述第一手臂连接轴32的另一端的手臂凹槽35用于配合所述第二手臂连接轴33的手臂节点34,以实现第一手臂连接轴32和第二手臂连接轴33之间的固定和相对摆动;
93.需要说明的是,上述手臂节点34和手臂凹槽35之间的固定方式与所述躯干节点14和躯干凹槽15的固定方式相同,以铆钉插入槽孔的方式进行固定。
94.优选的,所述第二手臂连接轴33包括两个分臂轴36,所述分臂轴36的一端设置有所述滑动球体9,另一端设置有滑槽37;
95.两个分臂轴36的滑动球体9各自滑动安装于对方的滑槽37内。
96.在本实施例中,所述第二手臂连接轴33设置有两个分臂轴36,两个分臂轴36一左一右,其中左侧分臂轴36的滑动球体9安装于右侧分臂轴36的滑槽37内,右侧分臂轴36的滑动球体9安装于左侧分臂轴36的滑槽37内,以头对尾,尾对头的形式进行固定,且两个分臂轴36的滑动球体9可以在滑槽37内滑动,将左侧分臂轴36向左侧滑动,右侧分臂轴36向右侧滑动,可以实现两个分臂轴36之间的分离。
97.优选的,所述腿部6包括腿部关节连接轴61和大腿连接轴62;
98.所述大腿连接轴62设置有腿部第一活动腔体64;
99.所述腿部关节连接轴61的两个连接端分别设置有所述滑动球体9,其中一滑动球体9嵌入安装于所述腹股部5的腹股第二活动腔体52,另一滑动球体9嵌入安装于所述腿部第一活动腔体64。
100.在本实施例中,所述腿部关节连接轴61其中一个连接端的滑动球体9插入腹股第二活动腔体52内,另一个连接端的滑动球体9插入腿部第一活动腔体64,可以实现腿部6和腹股部5之间的固定和相对摆动,需要说明的是,所述腿部6为左右对称结构,因此本技术仅阐述一侧结构,另一侧结构与所阐述的相同。
101.优选的,所述腿部6还包括小腿连接轴63;
102.所述小腿连接轴63设置有腿部节点65;
103.所述大腿连接轴62设置有腿部凹槽66;
104.所述腿部节点65嵌入安装于所述腿部凹槽66,以将所述小腿连接轴63固定于所述大腿连接轴62,所述小腿连接轴63可相对于所述大腿连接轴62发生摆动。
105.本实施例中,将所述腿部节点65置入腿部凹槽66内,利用铆钉连接槽孔的方式进行固定,可以实现大腿连接轴62和小腿连接轴63之间的固定和相对摆动。
106.以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术
人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1