一种能挥动触角的机械仿真章鱼设备的制作方法
1.本实用新型涉及仿真动物机构,尤其涉及一种表演或展示用的能挥动触角的机械仿真章鱼设备。
背景技术:
2.当前社会稳定且经济繁荣,文化旅游产业发展日新月异,人们已不满足于游览常规的自然景观和人文景观,转而追求体验更养眼和刺激的高科技主题公园。
3.而目前的主题公园,多是设置一些游乐设备、影音等设施供人们玩乐,虽也有些用于表演或展示的仿真动物,但由于并没有仿照动物本身特点进行动作驱动的机械结构,存在并无法达到能按动物本身特点进行大量动作生动仿真,无法以更逼真动作效果吸引游客和提升游客观看体验的问题。
技术实现要素:
4.基于现有技术所存在的问题,本实用新型的目的是提供一种能挥动触角的机械仿真章鱼设备,能解决现有主题公园设置的仿真动物,因缺少能仿照动物本身特点进行动作驱动的机械结构,所存在的并无法达到能按动物本身特点进行大量动作生动仿真,无法以更逼真动作效果吸引游客和提升游客观看体验的问题。
5.本实用新型的目的是通过以下技术方案实现的:
6.本实用新型实施方式提供一种能挥动触角的机械仿真章鱼设备,包括:
7.支撑旋转组件、传动组件和仿真章鱼组件;其中,
8.所述支撑旋转组件设有能旋转的主轴和静止的太阳齿轮;
9.所述传动组件固定设置在所述支撑旋转组件的主轴上,能由所述主轴驱动旋转,并在所述太阳齿轮驱动下进行水平往复运动;
10.所述仿真章鱼组件固定设置在所述支撑旋转组件的主轴上,处于所述传动组件上方,能由所述主轴驱动随所述传动组件同步旋转;
11.所述仿真章鱼组件设有多个活动式触角部件,各活动式触角部件分别与所述传动组件连接,能在所述传动组件的水平往复运动驱动下依次进行挥动的动作。
12.由上述本实用新型提供的技术方案可以看出,本实用新型实施例提供的能挥动触角的机械仿真章鱼设备,其有益效果为:
13.通过在支撑旋转组件的旋转主轴上依次设置传动组件和仿真章鱼组件,能在驱动传动组件和仿真章鱼组件绕旋转点同步旋转的同时,由太阳齿轮驱动传动组件进行水平往复运动,进而带动仿真章鱼组件的多个活动式触角部件绕旋转点依次进行上下挥动的动作。该设备结构简单,动作可靠,控制方便,效果逼真,能循环完成仿真章鱼依次交替上下挥动触角的动作,无需任何复杂控制。
附图说明
14.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。
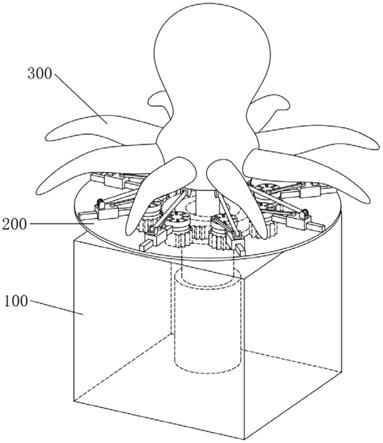
15.图1为本实用新型优选实施例的能挥动触角的机械仿真章鱼设备的整体结构示意图;
16.图2为本发明优选实施例中能挥动触角的机械仿真章鱼设备的传动组件结构示意图;
17.图3为本发明优选实施例的能挥动触角的机械仿真章鱼设备的支撑旋转组件结构示意图;
18.图4为本发明优选实施例中能挥动触角的机械仿真章鱼设备的仿真章鱼组件结构示意图;
19.图中各标记对应的部件名称为:100
‑
支撑旋转组件;101
‑
机架;102
‑
调速电机;103
‑
联轴器;104
‑
第二轴承座;105
‑
太阳齿轮;106
‑
圆锥滚子轴承;107
‑
主轴;
20.200
‑
传动组件;201
‑
下层转盘;202
‑
线性滑轨;203
‑
第一轴承座;204
‑
行星齿轮;205
‑
曲柄;206
‑
滑块;207
‑
第一关节轴承;208
‑
第一连杆;
21.300
‑
仿真章鱼组件;301
‑
上层转盘;302
‑
连接座;303
‑
第二连杆;304
‑
仿真章鱼触角;305
‑
第二关节轴承;306
‑
章鱼身体造型;307
‑
活动式触角部件。
具体实施方式
22.下面结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型的保护范围。本实用新型实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
23.如图1所示,本实用新型实施例提供一种能挥动触角的机械仿真章鱼设备,包括:
24.支撑旋转组件100、传动组件200和仿真章鱼组件300;其中,
25.所述支撑旋转组件100设有能旋转的主轴107和静止的太阳齿轮105;
26.所述传动组件200固定设置在所述支撑旋转组件100的主轴上,能由所述主轴107驱动旋转,并能在所述太阳齿轮105驱动下进行水平往复运动;具体的,传动组件200固定设置在主轴100中部,传动组件200的各曲柄滑块机构的滑块206能在太阳齿轮105驱动下进行水平往复运动;
27.所述仿真章鱼组件300固定设置在所述支撑旋转组件100的主轴上,处于所述传动组件200上方,能由所述主轴107驱动随所述传动组件200同步旋转;具体的,仿真章鱼组件300固定设置在主轴的顶端;
28.所述仿真章鱼组件300设有多个活动式触角部件307,各活动式触角部件307分别与所述传动组件200连接,能在所述传动组件200的水平往复运动驱动下依次进行挥动的动作。具体的,各活动式触角部件307分别与传动组件200的各曲柄滑块机构的滑块206一一对
应连接,并能在各滑块206的水平往复运动驱动下依次进行上下挥动的动作。
29.如图2所示,上述机械仿真章鱼设备中的传动组件200包括:
30.中间位置设有主轴安装孔的下层转盘201,该下层转盘201通过所述主轴安装孔固定安装在所述支撑旋转组件100的主轴107顶端;
31.多个曲柄滑块机构,呈环形均匀分布设置在所述下层转盘201上,各曲柄滑块机构均设有能与所述主轴107上的太阳齿轮105连接的行星齿轮204,各曲柄滑块机构的滑块206能在旋转主轴的驱动下在水平面上依次做往复运动;
32.一个曲柄滑块机构的滑块206连接所述仿真章鱼组件300的一个活动式触角部件307。
33.参见图2,上述传动组件200中的曲柄滑块机构包括:
34.线性滑轨202、第一轴承座203、行星齿轮204、曲柄205、滑块206、第一关节轴承207和第一连杆208;其中,
35.所述行星齿轮204通过所述第一轴承座203设置在所述下层转盘201上,能自由转动;具体的,该行星齿轮204与太阳齿轮105外啮合,转动的动力来自于传动组件200跟随支撑旋转组件100的主轴107整体旋转时太阳齿轮105的传动;
36.所述曲柄205固定设置在所述行星齿轮204上面,能与所述行星齿轮204同步转动;
37.所述线性滑轨202安装在所述下层转盘201上,对应设置在所述轴承座203外侧,与第一轴承座203无相对运动;
38.所述滑块206设置在所述线性滑轨202上,能在所述线性滑轨202上往复滑动;
39.所述第一连杆208一端与所述曲柄205活动连接,另一端与所述滑块206活动连接,能在旋转的所述曲柄205驱动下带动所述滑块206在所述线性滑轨202上沿水平方向往复滑动。
40.所述曲柄205上设有多个不同位置的安装孔,均能活动连接所述第一连杆208的一端,各安装孔环绕曲柄205圆心设置。这样挥动触角的角度可以通过选用曲柄205上直径方向不同的安装孔调整,各触角相对姿势可以通过选用曲柄上圆周方向不同的孔调整。
41.如图3所示,上述机械仿真章鱼设备中的支撑旋转组件100包括:
42.机架101、调速电机102、联轴器103、第二轴承座104、太阳齿轮105、圆锥滚子轴承106和主轴107;其中,
43.所述调速电机102和联轴器103均设置在所述机架101内,该调速电机102的转轴经所述联轴器103与所述主轴107连接,所述主轴107朝上,处于所述机架101顶面的中间位置;
44.所述第二轴承座104设置在所述主轴107位置的所述机架101顶面上,所述太阳齿轮105固定设置在所述第二轴承座104上,所述第二轴承座104内设有所述圆锥滚子轴承106,通过所述圆锥滚子轴承106与所述主轴107连接,所述第二轴承座104和所述太阳齿轮105保持静止;
45.所述太阳齿轮105与所述传动组件200的各曲柄滑块机构的行星齿轮204啮合。
46.上述支撑旋转组件100,通过采用调速电机102,可视表演效果调整调速电机转速从而调整动作周期,调速电机连续转动即可循环完成仿真章鱼挥动触角动作,无需任何复杂控制。
47.如图4所示,上述机械仿真章鱼设备中的仿真章鱼组件300包括:
48.上层转盘301、章鱼身体造型306和多个所述活动式触角部件307;其中,
49.所述上层转盘301,其中间位置设有主轴安装孔,能通过所述主轴安装孔固定安装在所述支撑旋转组件100的主轴107顶端;
50.所述章鱼身体造型306固定设置在所述上层转盘301上;
51.多个所述活动式触角部件307均匀分布环绕设置在所述章鱼身体造型306下部的外周上,每个活动式触角部件的自由端能在所述章鱼身体造型306上自由挥动。优选的,活动式触角部件307的数量为八个,形成一种八爪仿真章鱼。
52.上述的仿真章鱼组件300中的活动式触角部件307包括:
53.仿真章鱼触角304、连接座302、第二连杆303和第二关节轴承305;其中,
54.所述仿真章鱼触角304一端设置在所述章鱼身体造型306上,另一端为能挥动的自由端;
55.所述第二连杆303的一端经所述第二关节轴承305与所述仿真章鱼触角304内的支撑件后端连接,该第二连杆303的另一端连接所述连接座302,能通过所述连接座302连接所述传动组件200的一个曲柄滑块机构的滑块206。
56.本实用新型的能挥动触角的机械仿真章鱼设备,能实现八爪仿真章鱼在做整体旋转运动的同时,做交替上下挥动各触角的动作,并且动作周期、挥动触角的角度和各触角相对姿势均可以轻松调整,动作温柔且自然,结合美轮美奂的声光效果能营造轻松愉快的氛围,游客置身其中仿佛回到童年和进入海底世界,能为主题公园提供体验更好的玩乐设施,具有一定的现实价值。
57.下面将结合附图对本实用新型实施例作进一步地详细描述。
58.图1所示为本实用新型优选实施例的能挥动触角的机械仿真章鱼设备的整体结构,该机械机构包括:支撑旋转组件100、传动组件200和仿真章鱼组件300。
59.图2所示为本实用新型优选实施例的能挥动触角的机械仿真章鱼设备的传动组件的结构,该传动组件200主要零部件包括:下层转盘201、线性滑轨202、第一轴承座203、行星齿轮204、曲柄205、滑块206、第一关节轴承207和第一连杆208等零部件;其中,由线性滑轨202、曲柄205、滑块206、第一关节轴承207和第一连杆208等零部件组成一个曲柄滑块机构,由第一轴承座203、行星齿轮204等零部件与支撑旋转组件100的太阳齿轮105配合组成齿轮机构;曲柄滑块机构和齿轮机构均为八套,对应仿真章鱼组件300的八个活动式触角部件圆周方向均布安装于下层转盘201上;下层转盘201安装于可连续旋转的主轴107中部,旋转的动力通过齿轮机构和曲柄滑块机构分别驱动各滑块206在水平方向做往复运动。
60.图3所示为本实用新型优选实施例的能挥动触角的机械仿真章鱼设备的支撑旋转组件100的结构,该支撑旋转组件100主要包括:机架101、调速电机102、联轴器103、第二轴承座104、太阳齿轮105,圆锥滚子轴承106和主轴107等零部件;其中,调速电机102和第二轴承座104均安装于机架101中心,通过联轴器103驱动主轴107做连续旋转;太阳齿轮105安装于第二轴承座104上方,两者同心且均保持静止。
61.图4所示为本实用新型优选实施例的能挥动触角的机械仿真章鱼设备的仿真章鱼组件的结构,该仿真章鱼组件300主要包括:上层转盘301、章鱼身体造型306和八个活动式触角部件307,每个活动式触角部件由仿真章鱼触角304、连接座302、第二连杆303和第二关节轴承305组成,八套活动式触角部件307下端的连接座302分别与各滑块206一一对应连
接,各活动式触角部件307按旋转点圆周方向均布安装于章鱼身体造型306下部外周上,通过固定安装章鱼身体造型306的上层转盘301共同安装于可连续旋转的主轴107顶端,做往复运动的每个滑块206通过第二连杆303驱动活动式触角部件307的仿真章鱼触角304做上下挥动的动作,形成了仿真章鱼组件300的多个活动式触角部件绕旋转点依次进行上下挥动的动作。
62.上述仿真章鱼设备工作时,调速电机通过一系列传动,可实现八爪仿真章鱼在做整体旋转运动的同时做依次交替上下挥动触角的动作,使得挥动触角动作此起彼伏、错落有致。
63.综上所述,本实用新型的能挥动触角的机械仿真章鱼设备,能在仿真章鱼旋转的同时自动挥动仿真章鱼的活动触角,进而营造良好的表演效果。仿真章鱼整体旋转由下方调速电机直接驱动,并且通过齿轮机构和曲柄滑块机构等部件驱动上方的仿真章鱼触角做上下挥动的动作。该能挥动触角的机械仿真章鱼设备无需复杂电气控制,使用普通的调速电机、齿轮机构及曲柄滑块机构等零部件即可准确且可靠地循环完成模拟章鱼做整体旋转运动的同时做交替上下挥动各触角的动作。
64.本实用新型实施例中主要描述了机械结构,而实际的仿真章鱼设备还包括绚丽的造型、色彩和灯饰等。设备收到启动指令时,配合声光效果,可使游客体验到高科技带来的美轮美奂的震撼感受。
65.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1