一种分离式手功能康复训练基座的制作方法
1.本技术涉及医疗康复的领域,尤其是涉及一种分离式手功能康复训练基座。
背景技术:
2.生活中,交通事故和脑血管疾病容易造成患者出现上肢功能障碍。然而,人体的活动绝大部分需要依靠上肢完成,所以积极地进行上肢的康复训练对于此类数量庞大的患者来说极其重要。
3.现有的康复训练设备中,主要通过患者持握感应模具在训练设备的感应板上移动,并按感应板上的提示将感应模具放入感应板的孔中。感应模具内设置有磁铁,感应板内设置有磁铁感应装置,通过磁铁感应装置对患者的训练操作进行监测。然而在实际生活中,每个患者的个人情况不同,所以统一使用感应板进行上肢康复训练效果不高。
技术实现要素:
4.为了提升上肢康复训练的效果,本技术提供一种分离式手功能康复训练基座。
5.本技术提供的一种分离式手功能康复训练基座采用如下的技术方案:
6.一种分离式手功能康复训练基座,包括训练基座,所述训练基座包括训练板和功能基板;所述训练板安装在功能基板上,所述训练板上开设有多个与感应模具相适配的孔位;所述功能基板上设置有姿态传感器、预警提示模块、控制器以及基础功能模块,所述姿态传感器、预警提示模块以及基础功能模块均与控制器连接;所述姿态传感器用于检测训练基座的姿态,并输出姿态检测信号;所述控制器接收姿态检测信号,用于在训练基座的姿态达到预设姿态时,输出第一控制信号和第二控制信号;所述预警提示模块接收第一控制信号以启动计时,用于在训练超时情况下生成提示信息;所述基础功能模块包括多个训练单元,多个所述训练单元呈阵列分布,所述孔位与所述训练单元一一对应,训练单元用于接收第二控制信号并启动监测工作;所述训练基座内设置有无线通讯模块,所述训练基座通过所述无线通讯模块与感应板通信连接。
7.通过采用上述技术方案,训练基座通过无线通讯模块与感应板配合。训练过程中,改变训练基座的姿态以满足训练需求,当训练基座的姿态达到预设姿态时,控制器驱动预警提示模块启动计时,并在训练超时的情况下生成提示信息,以提示患者训练超时,防止超时训练而对患者造成二次伤害。当训练基座的姿态达到预设姿态时,控制器还驱动训练单元启动监测工作,从而实现智能监测患者进行训练的目的。因此,采用上述技术方案能够帮助患者进行合理训练,同时通过智能监测以观察患者的训练结果,便于定制更为合理的训练方案,进而提升上肢康复训练的效果。
8.可选的,所述孔位的内壁设置有导光板。
9.通过采用上述技术方案,导光板用于导光,使得患者查看到训练板上的孔位,便于在训练过程中指引患者进行训练。
10.可选的,所述孔位为圆形或三角形或多边形。
11.通过采用上述技术方案,使得训练基座能够适配更多类型的感应模具,从而提高训练基座的实用性。
12.可选的,还包括调节支架,所述调节支架安装在功能基板背离训练板的侧壁上,所述调节支架用于调节训练基座的姿态。
13.可选的,所述调节支架包括底座、支撑件以及安装板,所述支撑件一端与底座铰接,另一端与安装板铰接;所述安装板与所述训练基座可拆卸连接。
14.通过采用上述技术方案,支撑件一端与底座铰接,使得支撑件的高度可调,进而实现训练基座的高度可调;支撑件与安装板铰接,使得训练基座的倾角可调。通过采用上述技术手段,使得训练基座的姿态可随意调节,提高了训练基座的实用性。
15.可选的,所述预警提示模块包括计时单元、数据处理单元以及提示单元;所述计时单元连接控制器,用于在接收到第一控制信号时启动计时,并输出计时信号;数据处理单元连接计时单元,用于接收计时信号,当计时信号所反映的时间达到预设时间时,输出超时信号;所述提示单元连接数据处理单元,用于在接收到超时信号时生成提示信息。
16.通过采用上述技术方案,计时单元用于计时并输出计时信号,数据处理单元用于判断计时信号所反映的时间是否达到预设时间,当达到预设时间则输出超时信号;提示单元接收超时信号以生成提示信息,从而提示患者训练超时,防止训练超时对患者造成二次伤害。
17.可选的,所述提示单元包括串接于直流电源的开关管和蜂鸣器,所述蜂鸣器通过所述开关管与数据处理单元连接。
18.可选的,所述训练单元包括灯光标示子单元和霍尔传感器,所述灯光标示子单元和所述霍尔传感器均与所述控制器连接;所述灯光标示子单元用于接收所述第二控制信号,并响应所述第二控制信号以标示所述孔位;所述霍尔传感器用于检测被标示的孔位内的感应模具的放置状态,并输出状态检测信号;所述控制器还用于接收所述状态检测信号,当所述状态检测信号所反映的感应模具的放置状态为拿取时,输出正确拿取信号。
19.通过采用上述技术方案,首先,通过灯光标示子单元标示孔位,使得患者按照标示的孔位拿取感应模具,进而起到指引患者进行训练的目的;然后,霍尔传感器检测被标示的孔位内的感应模具的放置状态,并输出状态检测信号,然后由控制器判断患者是否拿取正确,进而实现监测患者进行训练的目的。
20.综上所述,本技术包括以下至少一种有益技术效果:
21.1.训练基座通过无线通讯模块与感应板配合。训练过程中,通过调节支架改变训练基座的姿态,使得训练基座的姿态满足训练需求。当训练基座的姿态达到预设姿态时,控制器驱动预警提示模块启动计时,并在训练超时的情况下生成提示信息,以提示患者训练超时,防止超时训练而对患者造成二次伤害。训练基座的姿态达到预设姿态时,控制器还驱动训练单元启动监测工作,从而实现智能监测患者进行训练的目的。因此,训练基座能够帮助患者进行合理训练,同时还能智能监测患者的训练过程,便于定制更为合理的训练方案,进而提升上肢康复训练的效果。
附图说明
22.图1是本技术的整体结构示意图。
23.图2是本技术的训练基座剖视图。
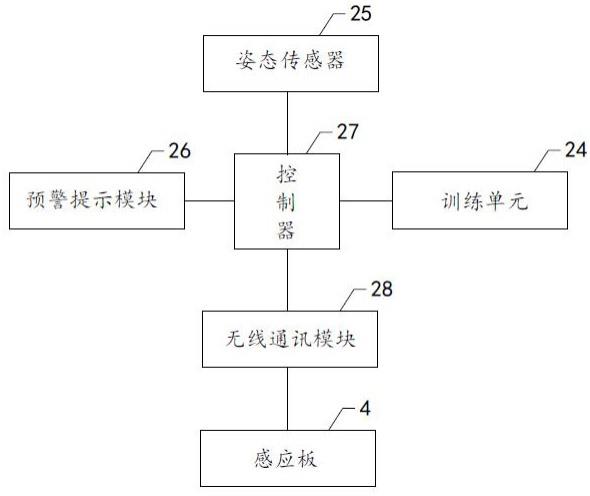
24.图3是本技术的整体训练流程示意图。
25.图4是本技术的训练超时系统结构示意图。
26.图5是本技术的训练过程监测系统结构示意图。
27.附图标记说明:1、调节支架;11、底座;12、支撑件;13、安装板;2、训练基座;21、孔位;22、功能基板;23、训练板;24、训练单元;241、灯光标示子单元;242、霍尔传感器;25、姿态传感器;26、预警提示模块;261、计时单元;262、数据处理单元;263、提示单元;27、控制器;28、无线通讯模块;3、感应模具;4、感应板。
具体实施方式
28.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整的描述。
29.本技术实施例公开一种分离式手功能康复训练基座。参照图1,分离式手功能康复训练基座包括调节支架1以及安装在调节支架1顶部的训练基座2,训练基座2上开设有适配于感应模具3的多个孔位21。训练基座2与感应板4配套使用。训练时,患者从训练基座2的孔位21内拿取感应模具3,并移动至感应板4的孔内。在训练的过程中,患者可通过调节支架1改变训练基座2的姿态,从而改变移动感应模具3的路径,以使得训练基座2的姿态满足康复训练需求。
30.由于感应板4有多种训练模式,每种训练模式所需的感应模具3的形状有可能不相同,为了使训练基座2能够适配多种训练模式,训练基座2上的孔位21有圆形、三角形或者多边形等。
31.参照图2,调节支架1包括底座11、支撑件12以及安装板13。底座11放置在康复训练活动区域的地面或者水平桌面上,底座11为u型柱,u型柱开口端与支撑件12一端铰接,支撑件12的另一端与安装板13的一侧壁铰接,安装板13远离支撑件12的侧壁与训练基座2可拆卸连接。具体地,安装板13靠近训练基座2的侧壁上开设有螺纹孔,安装板13通过与螺纹孔配合的螺钉与训练基座2连接,使得在安装或者拆卸训练基座2时较为方便。
32.参照图3,在本实施例中,为了便于训练基座2与感应板4进行信息交互,在训练基座2内设置有无线通讯模块28,训练基座2可以通过无线通讯模块28与感应板4通信连接,无线通讯模块28采用蓝牙。在其他实施例中,训练基座2可以通过线缆与感应板4连接。
33.参照图3,训练基座2包括功能基板22以及覆盖在功能基板22上的训练板23,功能基板22靠近训练板23的板面上设置有姿态传感器25、预警提示模块26、控制器27以及基础功能模块,姿态传感器25、预警提示模块26以及基础功能模块均与控制器27连接。基础功能模块包括多个训练单元24,多个训练单元24呈阵列分布,孔位21与训练单元24一一对应。
34.在本实施例中,姿态传感器25可以采用bmi型号的姿态传感器25或者lpms
‑
be oem型号的姿态传感器25等,具体使用型号在此不作限制。控制器27采用单片机,单片机为常用的数据处理电路,本技术不再对其展开描述。
35.参照图4,预警提示模块26包括计时单元261、数据处理单元262以及提示单元263。计时单元261连接控制器27,数据处理单元262分别连接计时单元261和提示单元263。其中,计时单元261优选为基于555定时器的计时单元261,基于555定时器的计时单元261为常用
的计时电路,本技术不再对其展开描述。数据处理单元262采用fpja芯片或者mcu芯片,fpja芯片和mcu芯片为常用的数据处理芯片,本技术不再对其展开描述。提示单元263包括串接于直流电源的开关管和蜂鸣器。开关管为npn型三极管,三极管的基极连接数据处理单元262、集电极连接直流电源、发射极连接蜂鸣器,蜂鸣器远离三极管的一端接地。
36.训练时,姿态传感器25实时检测训练基座2的姿态,并输出姿态检测信号;控制器27接收姿态检测信号,当姿态检测信号所反映的训练基座2的姿态达到预设姿态时,输出第一控制信号;计时单元261在接收到第一控制信号时,响应第一控制信号以启动计时,并输出计时信号;数据处理单元262接收计时信号,当计时时间达到预设时间时,数据处理单元262输出超时信号,超时信号为高电平信号。当三极管接收到高电平信号时,导通直流电源与蜂鸣器,使得蜂鸣器生成提示信息,即蜂鸣器蜂鸣,以提示患者训练超时。
37.参照图5,训练单元24包括灯光标示子单元241和霍尔传感器242,灯光标示子单元241和霍尔传感器242均与控制器27连接。其中,灯光标示子单元241包括多个rgb
‑
led,rgb
‑
led与孔位21一一对应。
38.训练时,控制器27接收姿态检测信号,当姿态检测信号所反映的训练基座2的姿态达到预设姿态时,控制器27还输出第二控制信号;灯光标示子单元241接收第二控制信号,并响应第二控制信号以对孔位21进行标示。为了便于患者看到被标示的孔位21,在孔位21的内壁设置有导光板,导光板采用透明的亚克力板,透明的亚克力板用于导出rgb
‑
led发出的光。
39.当患者查看到被标示的孔位21时,拿取被标示孔位21内的感应模具3,为了监测患者是否拿取正确,通过霍尔传感器242进行监测。具体地:霍尔传感器242响应第二控制信号以检测被标示的孔位21内感应模具3的放置状态,并输出状态检测信号;控制器27接收状态检测信号,当状态检测信号所反映的感应模具3放置状态为拿取时,输出正确拿取信号。
40.上述霍尔传感器242检测感应模具3放置状态的原理是:通过霍尔传感器242检测感应模具3内的磁铁距离,并将检测到的距离传输到控制器27中,由控制器27判断当前磁铁与霍尔传感器242之间的距离来判断当前被标示的孔位21内的感应模具3是否为被拿取。即预设一个距离阈值,当磁铁与霍尔传感器242之间的距离逐渐大于距离阈值时,说明感应模具3被拿取。反之,当磁铁与霍尔传感器242之间的距离逐渐小于距离阈值时,说明感应模具3被放入。或者磁铁与霍尔传感器242之间的距离不变,则说明感应模具3未被拿取。当患者从训练基座2上拿取的感应模具3正确时,控制器27输出正确拿取信号;当患者从训练板23上拿取的感应模具3错误时,控制器27输出错误拿取信号。
41.无线通讯模块28接收正确拿取信号或者错误拿取信号,并远程传输至感应板4内,由感应板4接收训练基座2输出的正确拿取信号或者错误拿取信号,再结合患者在感应板4上的操作,得到患者的最终训练数据。
42.本技术实施例一种分离式手功能训练基座的实施原理为:通过调节支架1改变训练基座2的姿态,使得训练基座2的姿态满足训练需求。当训练基座2的姿态达到预设姿态时,控制器27驱动预警提示模块26启动计时,并在训练超时的情况下生成提示信息,以提示患者训练超时,防止超时训练而对患者造成二次伤害。训练基座2的姿态达到预设姿态时,控制器27还驱动训练单元24启动监测工作,并将训练单元24监测到的训练结果通过无线通讯模块28传递至感应板4中,以便于结合患者在感应板4上的训练得到最终训练数据,从而
为患者定制更为合理的训练方案,进而提升上肢康复训练的效果。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1