一种运动员韧带训练装置
1.本发明属于运动员训练器材领域,尤其是涉及一种运动员韧带训练装置。
背景技术:
2.韧带是维持人体关节稳定性以及保护关节的重要纤维结缔组织;人体关节处韧带力量强、韧带柔韧性好,能降低关节、韧带或其他部位损伤的风险。尤其是对于运动员而言,需要其具有较强的韧带力量及较好的韧带柔韧性,以此能降低比赛或训练过程中其关节、韧带或其他部位受伤的风险。特别是体操运动员,自由体操、艺术体操、跳马、鞍马、单杠、双杠和蹦床等体操项目对体操运动员的身体柔韧性要求较高,因此,体操运动员会注重其韧带训练,通过韧带训练增强人体各关节处韧带力量和韧带柔韧性,以此提高身体柔韧性。
3.韧带训练的常用方法包括杆上压腿法、横叉训练法和竖叉训练法等,其中,横叉训练法和竖叉训练法的训练难度较大,需要训练者基础扎实,不适合刚开始韧带训练或无基础的运动员,杆上压腿法是最简单又行之有效的韧带训练方法,小到孩童、大到老年人均可利用杆上压腿法进行韧带训练,如在公园里也经常看到大爷或大妈将一只腿搭在高坎上进行压腿。
4.然而,对于体操运动员来说,其日常训练通常在训练室进行,针对刚开始韧带训练或韧带力量薄弱的运动员,其不适合在地上进行高难度的横叉训练或竖叉训练,运动员通常利用板凳、高台、单杠等进行杆上压腿训练,虽然也有一些用于杆上压腿的韧带训练装置,该装置可在训练前先调节好支撑座高度,韧带训练需要循序渐进,压腿高度亦是如此,但现有的训练装置不便于在训练过程中随时调节支撑座高度,不利于运动员从低至高的进行循序渐进的训练。
技术实现要素:
5.根据以上现有技术中的不足,本发明要解决的技术问题是:提供一种运动员韧带训练装置,该训练装置便于调节支撑座的高度,运动员在进行压腿韧带训练时可随时控制调节支撑座的高度,有利于循序渐进的进行韧带训练,能提高韧带训练的效率。
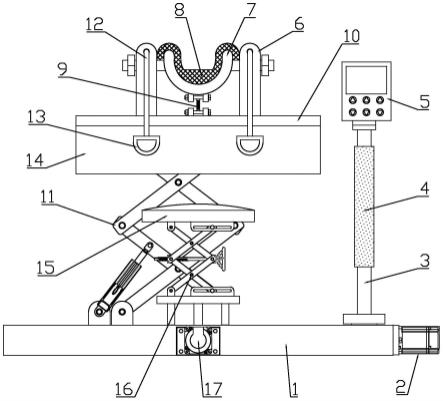
6.所述的运动员韧带训练装置,包括底板,所述底板的顶端安装有第一剪式升降机构,第一剪式升降机构上安装有顶板,第一剪式升降机构用于驱动顶板在竖直方向上升降;顶板上安装有支撑座,支撑座的顶端开设有前后贯通的弧形凹槽;底板的顶端安装有立杆,立杆的顶端安装有控制器,第一剪式升降机构与控制器电连接,控制器用于控制第一剪式升降机构升降。
7.进一步的,所述顶板的顶端设置有两个支撑板,两个支撑板沿左右方向平行间隔设置,支撑座设置于两个支撑板之间,且支撑座与两个支撑板铰接;支撑座上弧形凹槽的长度为10cm~30cm。
8.进一步的,所述底板的顶端与支撑座的底端之间设置有弹性复位组件。
9.进一步的,每个所述支撑板的顶部均开设有前后贯通的通孔,每个通孔内均穿设
有弹性橡皮绳,弹性橡皮绳的一端与底板的顶端固定连接,其另一端固定连接有拉环。
10.进一步的,所述底板上安装有第一横移驱动机构,第一横移驱动机构与控制器电连接,通过控制器可控制第一横移驱动机构启停,第一横移驱动机构用于驱动立杆在底板的顶端沿左右方向移动。
11.进一步的,所述底板的顶端设置有第二剪式升降机构,第二剪式升降机构上安装有座垫,第二剪式升降机构用于驱动座垫在竖直方向上升降。
12.进一步的,所述底板上安装有第二横移驱动机构,第二横移驱动机构与控制器电连接,通过控制器可控制第二横移驱动机构启停,第二横移驱动机构用于驱动第二剪式升降机构在底板的顶端沿前后方向移动。
13.与现有技术相比,本发明具有以下有益效果:
14.该训练设备可快速调节支撑座的高度,在进行压腿韧带训练时可利用控制器控制第一剪式升降机构启停,随时控制调节支撑座的高度,能有利于循序渐进的进行韧带训练,能节省支撑座的高度调节时间,能提高韧带训练的效率。
附图说明
15.图1为本发明的主视结构示意图;
16.图2为图1中a处局部结构放大示意图;
17.图3为图2中b-b方向剖视结构示意图;
18.图4为本发明中安装座垫后的主视结构示意图;
19.图5为本发明种安装座垫后的右视结构示意图;
20.图6为图5中c-c方向剖视结构示意图;
21.图7为图5中d-d方向剖视结构示意图;
22.图中各部件名称:1、底板
ꢀꢀ
2、第一横移驱动机构
ꢀꢀ
2.1、第一丝杆
ꢀꢀ
2.2、第一螺纹套筒
ꢀꢀ
2.3、第一电机
ꢀꢀ
2.4、第一滑块
ꢀꢀ
2.5、第一滑板
ꢀꢀ
3、立杆
ꢀꢀ
4、防滑套
ꢀꢀ
5、控制器
ꢀꢀ
6、支撑板
ꢀꢀ
7、支撑座
ꢀꢀ
8、泡沫垫层
ꢀꢀ
9、弹性复位组件 9.1、第一连接轴
ꢀꢀ
9.2、弹簧
ꢀꢀ
9.3、第二连接轴
ꢀꢀ
10、顶板
ꢀꢀ
11、第一剪式升降机构
ꢀꢀ
11.1、第一剪式支架
ꢀꢀ
11.2、 电动推杆
ꢀꢀ
12、弹性橡皮绳
ꢀꢀ
13、拉环 14、围挡
ꢀꢀ
15、座垫
ꢀꢀ
16、第二剪式升降机构
ꢀꢀ
16.1、连接杆
ꢀꢀ
16.2、第二剪式支架
ꢀꢀ
16.3、手轮
ꢀꢀ
17、第二横移驱动机构
ꢀꢀ
17.1、第二电机
ꢀꢀ
17.2、第二丝杆
ꢀꢀ
17.3、第二螺纹套筒
ꢀꢀ
17.4、第二滑块
ꢀꢀ
17.5、第二滑板
ꢀꢀ
18、第一滑槽
ꢀꢀ
19、第二滑槽。
具体实施方式
23.以下结合附图通过具体实施例对本发明作进一步说明,但不用以限制本发明,凡在本发明精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
24.实施例1
25.本实施例所述的一种运动员韧带训练装置,如图1所示,包括底板1,所述底板1的顶端安装有第一剪式升降机构11,第一剪式升降机构11上安装有顶板10,第一剪式升降机构11用于驱动顶板10在竖直方向上升降;顶板10上安装有支撑座7,支撑座7的顶端开设有
前后贯通的弧形凹槽,体操运动员进行韧带训练时,其的一只脚搭在支撑座7的弧形凹槽内;底板1的顶端安装有立杆3,立杆3的顶端安装有控制器5,第一剪式升降机构11与控制器5电连接,控制器5用于控制第一剪式升降机构11升降。
26.作为优选的实施方式,本实施例中,第一剪式升降机构11包括第一剪式支架11.1,底板1的顶端设置有电动推杆11.2,电动推杆11.2的底端与底板1铰接,电动推杆11.2的活塞端与第一剪式支架11.1铰接,电动推杆11.2用于驱动第一剪式支架11.1展开或收折;电动推杆11.2与控制器5电连接。
27.在此需要说明的是,第一剪式升降机构11为现有技术设备,可选购安装,本实施例中第一剪式升降机构11为电驱动式,除利用电动推杆11.2驱动第一剪式支架11.1展开或收折以外,还可以利用气缸或液压缸替代电动推杆11.2,均为现有技术,此外,第二剪式升降机构16为常用升降机构,其具体结构在公告号为cn210313325u或公告号为cn216613891u的专利中的均有记载,在此不再赘述。
28.作为优选的实施方式,本实施例中,顶板10的底端外侧设置有围挡14,当第一剪式升降机构11收折后,第一剪式升降机构11能隐藏于围挡14内。
29.作为优选的实施方式,本实施例中,支撑座7的后端以及弧形凹槽的内侧壁均设有泡沫垫层8,当体操运动员的脚置于弧形凹槽内时,泡沫垫层8能提高舒适性。
30.本实施例的工作原理及技术效果为:体操运动员利用该训练装置进行压腿韧带训练时,支撑座7位于低位,体操运动员抬高其一只脚并使脚搭在支撑座7的弧形凹槽内,泡沫垫层8起缓冲作用,并提高舒适性,体操运动员用手操控控制器5,通过控制器5控制第一剪式升降机构11启动,使第一剪式升降机构11伸展,以此带动支撑座7在竖直方向上升,直至支撑座7将脚抬高到合适位置时,控制第一剪式升降机构11停止,体操运动员在支撑座7的该高度下进行压腿韧带训练;当训练一段时间后,体操运动员想升高支撑座7的高度时,其控制第一剪式升降机构11启动并带动支撑座7上升,体操运动员对支撑座7的高度调节依靠自动化控制,无需其将腿脚从支撑座7抽出并放下来再利用传统的方式(垫高或换另一个更高的支撑座)调节支撑座7的高度,该训练设备可快速调节支撑座7的高度,在进行压腿韧带训练时可随时控制调节支撑座7的高度,能有利于循序渐进的进行韧带训练,能节省支撑座7的高度调节时间,能提高韧带训练的效率;在此需要说明的是,该训练装置不仅适用于体操运动员进行压腿韧带训练,对于其他运动员如田径运动员、舞蹈运动员等也可利用该训练装置进行压腿韧带训练。
31.实施例2
32.本实施例将技术进一步进行说明,如图1至图5所示,所述顶板10的顶端设置有两个支撑板6,两个支撑板6沿左右方向平行间隔设置,支撑座7设置于两个支撑板6之间,且支撑座7与两个支撑板6铰接,使支撑座7可在两个支撑板6之间转动一定角度;支撑座7上弧形凹槽的长度为10cm~30cm,通常情况下,杆上压腿时,体操运动员的脚跟搭在杆上或高台上,其小腿不受支撑,在进行韧带训练时,脚跟受力大,存在不舒适的情况,使体操运动员难以坚持,从而降低训练效率。
33.作为优选的实施方式,本实施例中,支撑座7的左侧壁和右侧壁均固定安装有转动轴,其左侧转动轴与左侧的支撑板6铰接,右侧的转动轴与右侧的支撑板6铰接,两个转动轴能支撑支撑座7,并供支撑座7转动。
34.作为优选的实施方式,本实施例中,支撑座7的外侧壁呈弧形,具体地,支撑座7可由空心半圆柱制成,支撑座7的长度即为10cm~30cm,使其能支撑一部分小腿;在此需要说明的是,支撑座7的长度应小于体操运动员的小腿长度,利用支撑座7支撑小腿时,支撑座7只支撑小腿的一段长度,并非整条小腿均要置于支撑座7的弧形凹槽内,10cm~30cm长度范围的支撑座7能满足大多数运动员的需求。
35.本实施例的工作原理及技术效果为:体操运动员进行韧带训练时,体操运动员抬高其一只脚并使脚跟处搭在支撑座7的弧形凹槽后端,其小腿搭在弧形凹槽内,利用弧形凹槽支撑其小腿,调节支撑座7的高度时,随着支撑座7的升高或降低,支撑座7能相对支撑板6转动,以此支撑体操运动员的腿脚,体操运动员弯腰压腿时,在腿脚的牵动下支撑座7能适应性转动调节,避免腿脚与支撑座7产生相对滑动对皮肤造成摩擦,能提高压腿韧带训练的舒适性及安全性;在此需要说明的是,利用杆上压腿法训练韧带时,如将脚搭在高台上,进行弯腰压腿时,通常只有脚跟一个着力点,不稳定,可能发生搓动导致脚跟跟腱受伤,而本实施例中,利用支撑座7支撑小腿一定长度,能使受力更稳定,避免受伤。
36.实施例3
37.本实施例将技术进一步进行说明,如图1至图5所示,所述底板1的顶端与支撑座7的底端之间设置有弹性复位组件9,体操运动员进行韧带训练时,其腿脚搭在支撑座7内弧形凹槽时,支撑座7会被压倾斜,弹性复位组件9则会被拉伸,当体操运动员的腿脚与支撑座7脱离后,在弹性复位组件9的作用下,支撑座7会复位。
38.作为优选的实施方式,本实施例中,弹性复位组件9包括弹簧9.2,弹簧9.2的一端设置有第一连接轴9.1,其另一端设置有第二连接轴9.3,弹簧9.2与第一连接轴9.1之间固定连接,弹簧9.2与第二连接轴9.3之间固定连接,可焊接固定;支撑座7的底端靠后侧处安装有铰接支座,第一连接轴9.1与铰接支座铰接;底板1的顶端安装有铰接支座,第二连接轴9.3与铰接支座铰接;当支撑座7转动时,第一连接轴9.1和第二连接轴9.3能转动,使弹簧9.2能自然拉伸和回缩;在此需要说明的是,弹性复位组件9也可以采用弹性橡皮筋,弹性橡皮筋的一端与支撑座7的底端固定连接,其另一端与底板1顶端固定连接,弹性橡皮筋的柔韧性好。
39.本实施例的工作原理及技术效果为:体操运动员进行压腿韧带训练,其腿脚抬高并搭在支撑座7内弧形凹槽时,支撑座7会被腿脚压倾斜,支撑座7的后端往上翘,弹性复位组件9则会被拉伸,当体操运动员的腿脚与支撑座7脱离后,在弹性复位组件9的作用下,支撑座7会复位,支撑座7的顶端保持齐平,下一次压腿韧带训练时,便于将脚抬高放入弧形凹槽内。
40.实施例4
41.本实施例将技术进一步进行说明,如图4至图5所示,每个所述支撑板6的顶部均开设有前后贯通的通孔,每个通孔内均穿设有弹性橡皮绳12,弹性橡皮绳12的一端与底板1的顶端固定连接,其另一端固定连接有拉环13,在进行韧带训练时,体操运动员可通过拉环13拉扯弹性橡皮绳12,以利用弹性橡皮绳12的作用力辅助其进行韧带训练。
42.本实施例的工作原理及技术效果为:体操运动员进行压腿韧带训练时,其一只脚搭在支撑座7的弧形凹槽内,训练时需要弯腰压腿,对于初始训练者,弯腰压腿比较困难和难受,其可用手握持拉环13,并拉伸弹性橡皮绳12,借助弹性橡皮绳12辅助弯腰压腿;具体
地,初始状态下,弹性橡皮绳12已经处于一定的拉伸状态,继续拉扯时,会产生一定的作用力,以辅助体操运动员进行弯腰压腿。
43.实施例5
44.本实施例将技术进一步进行说明,如图1、图4至图6所示,所述底板1上安装有第一横移驱动机构2,第一横移驱动机构2与控制器5电连接,通过控制器5可控制第一横移驱动机构2启停,第一横移驱动机构2用于驱动立杆3在底板1的顶端沿左右方向移动,以此能调节立杆3的位置,体操运动员在进行韧带训练时,可通过手抓住立杆3以辅助其稳定,立杆3的位置可调,便于体操运动员掌控。
45.作为优选的实施方式,本实施例中,立杆3的外部包裹设置有防滑套4,体操运动员抓握立杆3时,防滑套4能防滑。
46.作为优选的实施方式,本实施例中,控制器5的底端与立杆3的顶端转动连接,具体地,通过设置轴承转动连接;将立杆3从底板1顶端左侧移动至右侧或从右侧移动至左侧时,可转动控制器5,使控制器5面向体操运动员,便于其操作控制器5。
47.作为优选的实施方式,本实施例中,如图6所示,第一横移驱动机构2包括第一丝杆2.1和第一电机2.3;底板1的右端面开设有向左端延伸的第一滑槽18,第一滑槽18未贯穿底板1的左端面,第一滑槽18的截面呈倒置的t型,且上下贯通底板1;第一丝杆2.1的左端与第一滑槽18的左侧壁转动连接,其右端与第一电机2.3的转轴传动连接,第一电机2.3固定安装于底板1右端面,第一电机2.3与控制器5电连接,通过第一电机2.3能驱动第一丝杆2.1转动;第一丝杆2.1上螺纹连接有第一螺纹套筒2.2,第一滑槽18内滑动设置有第一滑块2.4,第一滑块2.4的顶端固定连接有第一滑板2.5,其底端与第一螺纹套筒2.2固定连接,第一滑板2.5的底端面与底板1的顶端面滑动连接,立杆3的底端与第一滑板2.5的顶端固定连接;通过控制第一电机2.3使第一丝杆2.1转动,能驱动立杆3沿第一滑槽18在左右方向移动。
48.本实施例的工作原理及技术效果为:体操运动员在进行压腿韧带训练时,其两只腿可能交替进行训练,比如其抬高右脚进行压腿韧带训练时,其左脚立地支撑,其必定朝向底板1的左侧,此种情况下可通过控制器5驱动第一横移驱动机构2,使第一横移驱动机构2将立杆3移动至底板1的左侧,体操运动员进行训练时可通过手抓住立杆3以辅助其稳定,立杆3与体操运动员之间的间距可调,便于体操运动员掌控;反之,其抬高左脚进行压腿韧带训练时,其朝向底板1的右侧,则需要将立杆3移动至底板1的右侧。
49.实施例6
50.本实施例将技术进一步进行说明,如图4、图5和图7所示,所述底板1的顶端设置有第二剪式升降机构16,第二剪式升降机构16上安装有座垫15,第二剪式升降机构16用于驱动座垫15在竖直方向上升降,以此调节座垫15的高度,使其满足不同身高的体操运动员的乘坐高度要求。
51.在此需要说明的是,第二剪式升降机构16为现有技术设备,可选购安装,本实施例中第二剪式升降机构16为机械驱动式,如图7所示,第二剪式升降机构16包括第二剪式支架16.2及其上安装的连接杆16.1,连接杆16.1的一端与第二剪式支架16.2转动连接,其另一端与连接杆16.1螺纹连接,通过转动连接杆16.1驱动第二剪式支架16.2展开或收折,连接杆16.1上与第二剪式支架16.2转动连接一端安装有手轮16.3,通过手轮16.3便于转动连接杆16.1,以调节座垫15的高度;除利用连接杆16.1驱动第二剪式支架16.2展开或收折以外,
还可以利用电动推杆、气缸或液压缸替代连接杆16.1,均为现有技术,在此不再赘述。
52.本实施例的工作原理及技术效果为:体操运动员进行压腿韧带训练时,其一只脚抬高,另一只脚立地支撑,可能存在疲惫的情况,此种情形,体操运动员可坐在座垫15上进行休息,其可将抬高的脚放下,再坐在座垫15上,或无需放下抬高的脚,可利用控制器5控制支撑座7降低后顺势坐在座垫15上,能节省训练时间。
53.实施例7
54.本实施例将技术进一步进行说明,如图4、图5和图7所示,所述底板1上安装有第二横移驱动机构17,第二横移驱动机构17与控制器5电连接,通过控制器5可控制第二横移驱动机构17启停,第二横移驱动机构17用于驱动第二剪式升降机构16在底板1的顶端沿前后方向移动,以此能调节第二剪式升降机构16上安装的座垫15的位置;体操运动员在进行韧带训练时,可提前调节好座垫15的高度,其训练过程中,可通过控制器5随时控制第二横移驱动机构17的位置,以此调节座垫15的位置。
55.作为优选的实施方式,本实施例中,如图7所示,第二横移驱动机构17包括第二电机17.1和第二丝杆17.2;底板1的前端面开设有向后端延伸的第二滑槽19,第二滑槽19未与第一滑槽18交叉,第二滑槽19的截面呈倒置的t型,且上下贯通底板1;第二丝杆17.2的后端与第二滑槽19的后侧壁转动连接,其前端与第二电机17.1的转轴传动连接,第二电机17.1固定安装于底板1前端面,第二电机17.1与控制器5电连接,第二电机17.1能驱动第二丝杆17.2转动;第二丝杆17.2上螺纹连接第二滑板17.5,其底端与第二螺纹套筒17.3固定连接,第二剪式升降机构16安装于第二滑板17.5上;通过控制第二电机17.1使第二丝杆17.2转动,能驱动座垫15沿第二滑槽19在前后方向移动;第二滑板17.5的底端安装有两个支撑滑板,两个支撑滑板沿第二滑块17.4左右对称设置,支撑滑板的顶端与第二滑板17.5的底端固定连接,其底端与底板1的顶端滑动连接,通过支撑滑板能提高第二滑板17.5的稳定。
56.在此需要说明的是,本实施例中控制器5为现有技术设备,其具有命令输入模块(如控制按钮)和数据处理模块(电路板)等,可选用atmega16通用型单片机控制器,也可用选用三菱plc控制器,其控制第一剪式升降机构11的电动推杆11.2动作、控制第一横移驱动机构2的第一电机2.3动作、控制第二横移驱动机构17的第二电机17.1动作为公知技术,利用现有的控制器5即可实现,常见的如数控机床上的控制器。
57.本实施例的工作原理及技术效果为:体操运动员进行压腿韧带训练时,其一只脚抬高,另一只脚立地支撑,可能存在疲惫的情况,此种情形,体操运动员可坐在座垫15上进行休息,座垫15的初始位置远离其站立的位置,以避免座垫15产生阻挡,体操运动员想要坐下休息时,其通过控制器5控制第二横移驱动机构17启动,第二横移驱动机构17带动第二剪式升降机构16移动,使第二剪式升降机构16靠拢体操运动员站立处,便于其就地坐下休息;在进行训练前,可提前调节好座垫15的高度,其训练过程中,通过控制器5随时控制第二横移驱动机构17调节座垫15的位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1