一种乒乓球智能收集机器人
1.本发明涉及体育器材设备技术领域,尤其涉及一种乒乓球智能收集机器人。
背景技术:
2.随着“加强身心健康”口号的提出,越来越多的人参与到体育活动中。同时。乒乓球作为老少皆宜的体育活动,越来越收到广大群众的喜爱。在进行乒乓球运动的同时,难免会有乒乓球掉落在地上,运动者要将乒乓球一个个捡起,就会给运动者造成额外的工作量,浪费大量的时间。市面上现有的产品中,有一些辅助捡球的工具,如滚筒式乒乓球拾球器,在使用过程中需要拾球者用手推动拾球器在地面滚动,乒乓球拨开滚筒上的弹性绳进入滚筒,从而完成拾球,但此类工具仍需人工操作;又比如乒乓球集球网,将此网放置在乒乓球桌周围,可以收集到达集球网位置的乒乓球,但此类工具体积较大,收集范围很有限,且没有主动收集的功能。因此,需要解决如下问题:1、如何确定乒乓球的分布;2、怎样对乒乓球进行拾取;3、拾取后乒乓球在哪里存放。
技术实现要素:
3.本发明目的在于针对现有技术的缺陷,提供一种乒乓球智能收集机器人,能够通过图像识别部分大范围识别乒乓球的分布位置,智能化的拾取并收集乒乓球,很大程度减少人工拾取乒乓球的时间,节省人工劳动。
4.为解决上述技术问题,本发明提供技术方案如下:
5.一种乒乓球智能收集机器人,其特征在于:包括外壳、控制器、图像识别机构、收集机构、行走机构,所述收集机构包括收集箱、伸缩杆、弹簧,所述伸缩杆的一端连接在所述外壳上,另一端连接所述收集箱,所述收集箱的底部为镂空结构,其上布置有若干所述弹簧,弹簧的间距小于乒乓球的直径,所述伸缩杆能够带动收集箱上下移动,所述行走机构设置在所述外壳的底部,所述图像识别机构设置在外壳上并能够采集周围环境信息,所述控制器设置在外壳上,并且能够连接控制图像识别机构、伸缩杆和行走机构。
6.进一步的,所述外壳后端顶部设置有第一圆形孔,所述控制器的底部与所述第一圆形孔通过螺栓连接固定在所述外壳上。
7.进一步的,所述外壳顶部设置有若干凸出部,所述伸缩杆的顶部设置有第二圆形孔,所述伸缩杆通过所述第二圆形孔连接在凸出部上。
8.进一步的,所述凸出部和伸缩杆分别设置有四个,所述凸出部沿着所述外壳均匀分布。
9.进一步的,所述弹簧平行等距布置。
10.进一步的,所述图像识别机构包括摄像头、第一支撑架、底座,所述外壳前端顶部设置有第三圆形孔,所述摄像头通过所述底座连接在所述第一支撑架上,第一支撑架与所述第三圆形孔螺栓连接,所述控制器连接摄像头。
11.进一步的,所述行走机构包括驱动部,所述驱动部包括第二支撑架、驱动电机、驱
动轮,所述第二支撑架的上端设置有第四圆形孔,通过所述第四圆形孔连接所述外壳的底部,第二支撑架的下端设置有第五圆形孔和第六圆形孔,所述驱动电机通过所述第五圆形孔连接于所述第二支撑架,驱动电机的驱动轴穿过所述第六圆形孔连接所述驱动轮,所述控制器连接驱动电机。
12.进一步的,所述行走机构包括转向部,所述转向部包括转向架、转向轮,所述转向架的上端设置有第七圆形孔,通过所述第七圆形孔连接所述外壳的底部,转向架的下端设置有第八圆形孔,所述转向轮通过所述第八圆形孔连接于所述转向架,所述控制器连接转向架。
13.进一步的,所述转向轮和第八圆形孔之间通过六角螺母和六角螺栓连接。
14.进一步的,所述驱动部设置有两个,对称设置在所述外壳底部前端,所述转向部设置在外壳底部后端。
15.与现有技术相比,本发明的有益效果是:1、通过图像识别机构可以大范围识别乒乓球的分布位置,智能化的寻找散落的乒乓球,很大程度减少人工拾取乒乓球的时间,节省人工劳动。2、结构简单,没有传统收集装置所需的机械臂,只需要伸缩杆便可以进行拾取动作。3、操作简单,没有传统机器人需要人工进行远程遥控控制,只需要确定开始工作,机器人就可以智能的进行乒乓球收集。4、成本较低,由于该机器人结构简单,没有复杂的机械系统,在进行制造时成本很低。
附图说明
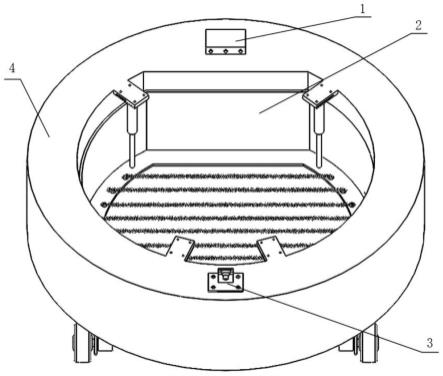
16.图1为本发明实施例整体结构示意图;
17.图2为本发明实施例底部结构示意图;
18.图3为本发明实施例控制器结构示意图;
19.图4为本发明实施例收集机构结构示意图;
20.图5为本发明实施例图像识别机构结构示意图;
21.图6为本发明实施例驱动部结构示意图;
22.图7为本发明实施例转向部结构示意图;
23.其中:1-控制器,2-收集机构,3-图像识别机构,4-外壳,5-驱动部,6-转向部,101-第一圆形孔,201-收集箱,202-第二圆形孔,203-伸缩杆,204-弹簧,301-摄像头,302-第一支撑架,303-底座,304-第三圆形孔,401-凸出部,501-第四圆形孔,502-第二支撑架,503-第五圆形孔,504-驱动电机,505-第六圆形孔,506-驱动轮,601-第七圆形孔,602-转向架,603-第八圆形孔,604-六角螺母,605-转向轮,606-六角螺栓,607-垫片。
具体实施方式
24.为了加深本发明的理解,下面我们将结合附图对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
25.图1-7示出了一种乒乓球智能收集机器人的具体实施方式,包括外壳4、控制器1、图像识别机构3、收集机构2、行走机构,收集机构2包括收集箱201、伸缩杆203、弹簧204,伸缩杆203的一端连接在外壳4上,另一端连接收集箱201,收集箱201的底部为镂空结构,其上布置有若干弹簧204,弹簧204的间距小于乒乓球的直径,伸缩杆203能够带动收集箱201上
下移动,行走机构设置在外壳4的底部,图像识别机构3设置在外壳4上并能够采集周围环境信息,控制器1设置在外壳4上,并且能够连接控制图像识别机构3、伸缩杆203和行走机构。行走机构包括驱动部5和转向部6.
26.如图3所示,外壳4后端顶部设置有第一圆形孔101,控制器1的底部与第一圆形101孔通过螺栓连接固定在外壳4上。
27.如图1、4所示,外壳4顶部设置有若干凸出部401,伸缩杆203的顶部设置有第二圆形孔202,伸缩杆203通过第二圆形孔202连接在凸出部401上。凸出部401和伸缩杆203分别设置有四个,凸出部401沿着外壳4均匀分布。弹簧204平行等距布置。
28.如图5所示,图像识别机构3包括摄像头301、第一支撑架302、底座303,外壳4前端顶部设置有第三圆形孔304,摄像头301通过底座303连接在第一支撑架302上,第一支撑架302与第三圆形孔304螺栓连接,控制器1连接摄像头301。
29.如图6所示,驱动部5由第二支撑架502、驱动电机504、驱动轮506组成,第二支撑架502的上端设置有第四圆形孔501,通过第四圆形孔501连接外壳4的底部,第二支撑架502的下端设置有第五圆形孔503和第六圆形孔505,驱动电机504通过第五圆形孔503连接于第二支撑架502,驱动电机504的驱动轴穿过第六圆形孔505连接驱动轮506,控制器1连接驱动电机504。
30.如图7所示,转向部6由转向架602、转向轮605组成,转向架602的上端设置有第七圆形孔601,通过第七圆形孔601连接外壳4的底部,转向架602的下端设置有第八圆形孔603,转向轮605通过第八圆形孔603连接于转向架602,控制器1连接转向架602。转向轮605和第八圆形孔603之间通过六角螺母604、垫片607和六角螺栓606连接。
31.驱动部5设置有两个,对称设置在外壳4底部前端,转向部6设置在外壳4底部后端。
32.上述实施例的工作原理如下:在确定要使用该机器人后将电源打开,该机器人通过摄像头301采集周围的环境信息,将该信息传递给控制器1,控制器1对信息进行处理,识别处乒乓球所处的位置并控制驱动电机504和转向部6带动机器人行至乒乓球的上方;此时四个伸缩杆203同时开始工作,带动收集箱201下降,由于收集箱201底部有数根弹簧204且每两根弹簧204之间的距离又略小于乒乓球的直径,在弹簧204与乒乓球接触时压力的作用会使得弹簧204发生形变,使得乒乓球从两根弹簧204之间进入到收集箱201内,之后伸缩杆203会反向运动带动收集箱201上升,同时由于乒乓球已经进入到收集箱201内,压力消失,弹簧204恢复到原有的长度,此时弹簧204起到支撑的作用,使乒乓球处于收集箱201内,阻碍了乒乓球的掉落,待收集箱201回到原位时,一个收集阶段结束,并重复上述过程。
33.上述具体实施方式,仅为说明本发明的技术构思和结构特征,目的在于让熟悉此项技术的相关人士能够据以实施,但以上内容并不限制本发明的保护范围,凡是依据本发明的精神实质所作的任何等效变化或修饰,均应落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1