一种用于机器人拼接式轨迹车道的制作方法
本技术涉及拼接式轨迹车道具领域,尤其涉及一种用于机器人拼接式轨迹车道。
背景技术:
1、在使用机器人时,轨迹车道被广泛地用来对机器人进行线路行驶,拼接式轨迹车道需要孩子动手进行拼接,能够提高孩子的动手能力,使孩子发散思维,更加精明能干,机器人在拼接式轨迹车道中也有所应用。
2、目前,在机器人使用的过程中需要用到轨迹车道对钢管进行路线作业便于机器人行驶,但是现有的拼接式轨迹车道在使用时,进行比赛时需要计时,起始位置不明确,没有阻拦物拦着,在比赛时会使数据不准确。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种用于机器人拼接式轨迹车道。
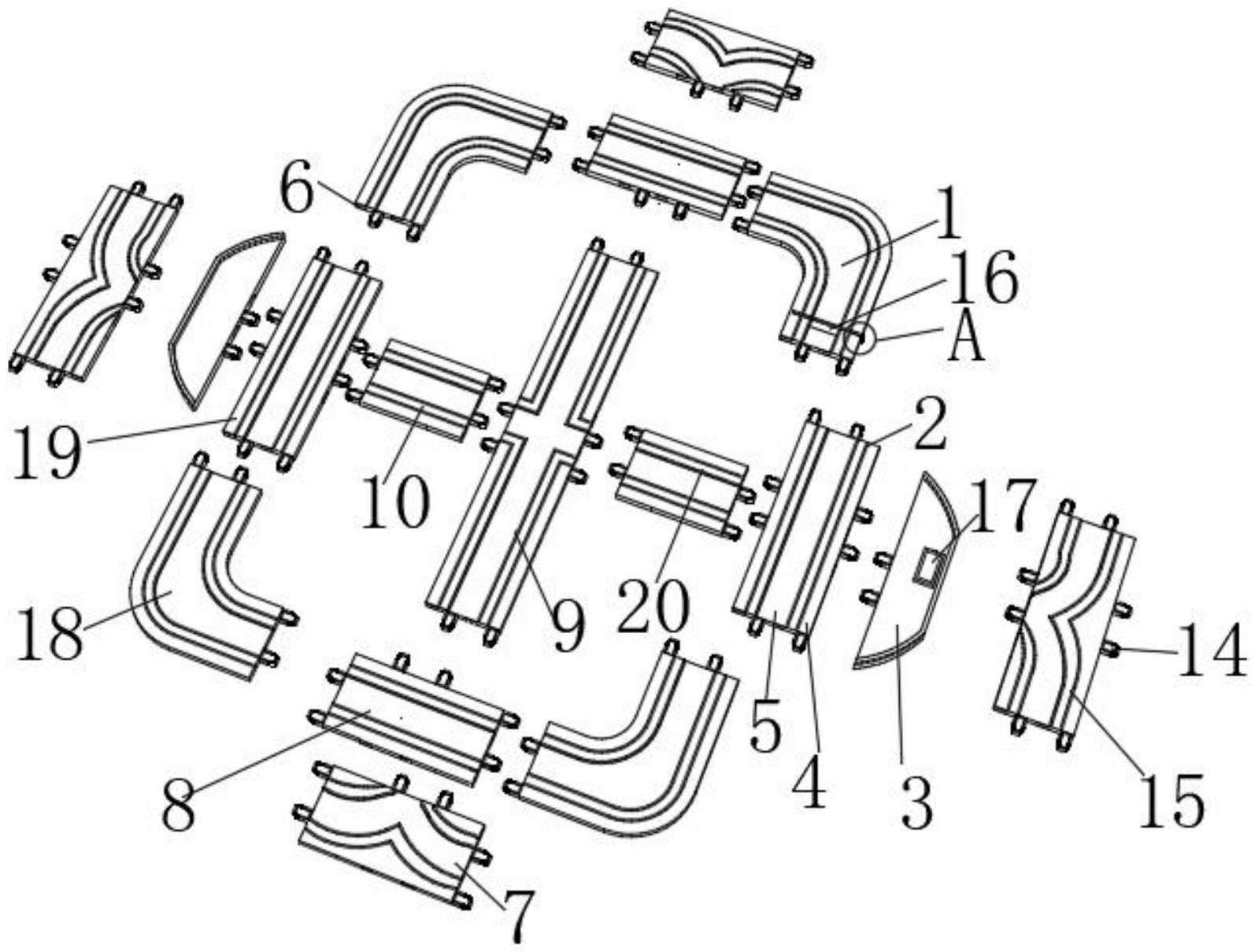
2、为了实现上述目的,本实用新型采用了如下技术方案:一种用于机器人拼接式轨迹车道,包括第一车道,所述第一车道前后两端均设置有第一转角车道,两个所述第一转角车道左侧均设置有第二车道,两个所述第二车道左侧均设置有第二转角车道,两个所述第二转角车道之间设置有第四车道,所述第四车道右端中心位置处设置有第三车道,所述第一车道左侧中心位置处设置有第五车道,所述第三车道与第五车道之间设置有十字车道,所述第一车道右侧设置有空道,前端所述第一转角车道右侧偏后位置处固定连接有固定块,所述固定块顶部固定连接有电动推杆,所述第一转角车道顶部偏后位置处设置有压力传感器,所述第一车道顶部中心位置处设置有限位槽,所述第一车道前后左右四面均固定连接有两个连接件,所述第二车道前端和左右两侧三面均固定有两个连接件,所述十字车道前后左右四面均设置有两个连接件,所述第一转角车道后端和左侧两面均固定连接有两个连接件,所述第三车道左右侧两面均固定连接有两个连接件,相邻的所述连接件之间分别交错分布,所述第一车道、第二车道、十字车道、第一转角车道和第三车道上与连接件相对应的位置分别设置有凹槽,且连接件分别与凹槽之间滑动连接。
3、作为上述技术方案的进一步描述:
4、两个所述第二车道之间设置有十字车道。
5、作为上述技术方案的进一步描述:
6、所述第四车道左侧设置有空道。
7、作为上述技术方案的进一步描述:
8、两个所述第一转角车道左侧均还可以设置有第一双转角车道。
9、作为上述技术方案的进一步描述:
10、两个所述第一转角车道之间还可以设置有第二双转角车道。
11、作为上述技术方案的进一步描述:
12、所述空道顶部右侧偏上位置处设置有计时器。
13、作为上述技术方案的进一步描述:
14、所述电动推杆顶部固定连接有挡杆。
15、作为上述技术方案的进一步描述:
16、所述第一车道顶部左右两侧均设置有线路条。
17、本实用新型具有如下有益效果:
18、本实用新型中,首先把需要用的机器人放置到前端第一转角车道位置处的限位槽内,这时电动推杆向下运动,阻拦住机器人,当开始比赛时,则电动推杆向上运动,档杆高度比机器人高的位置,当机器人走过压力传感器时,计时器开始机器,数据准确。
技术特征:
1.一种用于机器人拼接式轨迹车道,包括第一车道(4),其特征在于:所述第一车道(4)前后两端均设置有第一转角车道(1),两个所述第一转角车道(1)左侧均设置有第二车道(8),两个所述第二车道(8)左侧均设置有第二转角车道(18),两个所述第二转角车道(18)之间设置有第四车道(19),所述第四车道(19)右端中心位置处设置有第三车道(10),所述第一车道(4)左侧中心位置处设置有第五车道(20),所述第三车道(10)与第五车道(20)之间设置有十字车道(9),所述第一车道(4)右侧设置有空道(3),前端所述第一转角车道(1)右侧偏后位置处固定连接有固定块(13),所述固定块(13)顶部固定连接有电动推杆(12),所述第一转角车道(1)顶部偏后位置处设置有压力传感器(16),所述第一车道(4)顶部中心位置处设置有限位槽(5),所述第一车道(4)前后左右四面均固定连接有两个连接件(14),所述第二车道(8)前端和左右两侧三面均固定有两个连接件(14),所述十字车道(9)前后左右四面均设置有两个连接件(14),所述第一转角车道(1)后端和左侧两面均固定连接有两个连接件(14),所述第三车道(10)左右侧两面均固定连接有两个连接件(14),相邻的所述连接件(14)之间分别交错分布,所述第一车道(4)、第二车道(8)、十字车道(9)、第一转角车道(1)和第三车道(10)上与连接件(14)相对应的位置分别设置有凹槽(6),且连接件(14)分别与凹槽(6)之间滑动连接。
2.根据权利要求1所述的一种用于机器人拼接式轨迹车道,其特征在于:两个所述第二车道(8)之间设置有十字车道(9)。
3.根据权利要求1所述的一种用于机器人拼接式轨迹车道,其特征在于:所述第四车道(19)左侧设置有空道(3)。
4.根据权利要求1所述的一种用于机器人拼接式轨迹车道,其特征在于:两个所述第一转角车道(1)左侧均还可以设置有第一双转角车道(7)。
5.根据权利要求1所述的一种用于机器人拼接式轨迹车道,其特征在于:两个所述第一转角车道(1)之间还可以设置有第二双转角车道(15)。
6.根据权利要求1所述的一种用于机器人拼接式轨迹车道,其特征在于:所述空道(3)顶部右侧偏上位置处设置有计时器(17)。
7.根据权利要求1所述的一种用于机器人拼接式轨迹车道,其特征在于:所述电动推杆(12)顶部固定连接有挡杆(11)。
8.根据权利要求1所述的一种用于机器人拼接式轨迹车道,其特征在于:所述第一车道(4)顶部左右两侧均设置有线路条(2)。
技术总结
本技术公开了一种用于机器人拼接式轨迹车道,包括第一车道,所述第一车道前后两端均设置有第一转角车道,两个所述第一转角车道左侧均设置有第二车道,两个所述第二车道左侧均设置有第二转角车道,两个所述第二转角车道之间设置有第四车道,所述第四车道右端中心位置处设置有第三车道,所述第一车道左侧中心位置处设置有第五车道,所述第三车道与第五车道之间设置有十字车道。本技术中,首先把需要用的机器人放置到前端第一转角车道位置处的限位槽内,这时电动推杆向下运动,阻拦住机器人,当开始比赛时,则电动推杆向上运动,档杆高度比机器人高的位置,当机器人走过压力传感器时,计时器开始机器,数据准确。
技术研发人员:韩金刚
受保护的技术使用者:河北史塔克教育科技有限公司
技术研发日:20221221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!