脚踏运动系统、控制方法、以及记录介质与流程
本发明涉及一种脚踏运动系统、控制方法、以及程序。
背景技术:
1、专利文献1(日本特开2018-171421号公报)公开了一种搭载了电动辅助功能的脚踏运动器械。即使是因脑梗塞等的下肢神经的功能性损伤的体弱者以及因高龄而导致脚肌力过度衰减的人,也能够利用该脚踏运动器械。
技术实现思路
1、发明所要解决的课题
2、可是,对于消除伴随着案头工作的平日的运动不足来说,典型地,优选为,在办公桌的下方设置脚踏运动器械。即,如果在案头工作中就在座位上使用脚踏运动器械来进行脚踏运动,则能够在不用特意地确保用于运动的时间的情况下,消除平日的运动不足。
3、但是,如果仅仅是在办公桌的下方设置了脚踏运动器械,并非任何人都会进行脚踏运动。这是因为,在对于脚踏运动的积极性上存在个体差异。即,对于对脚踏运动的积极性较低的人来说,开始进行脚踏运动时的障碍较高。
4、因此,本公开的目的在于,提供一种在进行脚踏运动时,推动用户以开始进行脚踏运动的技术。
5、用于解决课题的方法
6、根据本公开的第一观点,提供一种脚踏运动系统,其具备:踏板单元,其包括一对踏板;器械主体,其以能够旋转的方式对所述踏板单元进行支承;旋转致动器,其使所述踏板单元进行旋转;运动监视传感器,其对使用了所述踏板单元的脚踏运动的有无进行检测;控制器,所述控制器在基于所述运动监视传感器的检测结果而判定为所述脚踏运动未被实施的情况下,以让所述旋转致动器使所述踏板单元进行旋转的方式对所述旋转致动器进行控制。根据以上的结构,由于在用户没有实施脚踏运动时,所述踏板单元会自动地开始旋转,因此能够作出推动以使用户开始进行脚踏运动。
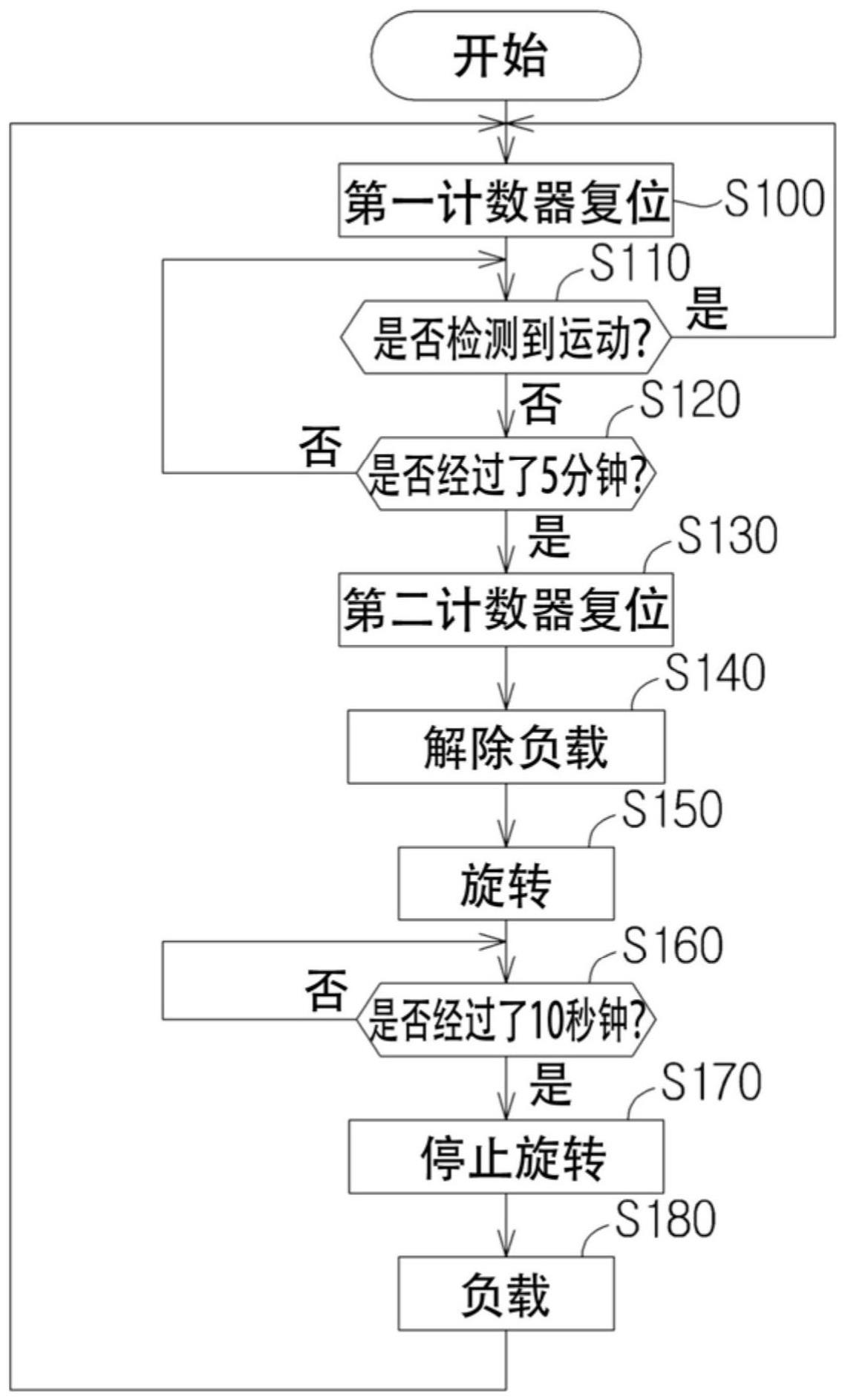
7、也可以采用如下方式,即,所述控制器在基于所述运动监视传感器的检测结果而判定为所述脚踏运动未被实施的状态持续了第一时间以上的情况下,以让所述旋转致动器使所述踏板单元进行旋转的方式对所述旋转致动器进行控制。根据以上的结构,不会总是强迫用户进行脚踏运动,从而能够确保用户进行休息的时间。
8、也可以采用如下方式,即,所述控制器在开始了让所述旋转致动器使所述踏板单元进行旋转的控制之后,如果规定的条件成立了,则停止让所述旋转致动器使所述踏板单元进行旋转的控制。根据以上的结构,能够作出推动以使用户开始进行脚踏运动,直到规定的条件成立为止。
9、也可以采用如下方式,即,所述规定的条件为,从所述控制器开始了让所述旋转致动器使所述踏板单元进行旋转的控制之后起经过第二时间。根据以上的结构,能够作出推动以使用户开始进行脚踏运动,直到经过所述第二时间为止。
10、也可以采用如下方式,即,所述运动监视传感器为,对用户的下肢的动作进行检测的动作检测传感器。
11、也可以采用如下方式,即,所述运动监视传感器为,对所述踏板单元的旋转进行检测的旋转检测传感器。
12、也可以采用如下方式,即,还具备落座部,所述落座部能够供实施所述脚踏运动的用户落座,所述落座部以具有三轴自由度且能够摆动的方式被构成。根据以上的结构,能够在所述踏板单元自动地开始旋转时,通过上行性的运动链来锻炼躯干的肌肉。
13、根据本公开的第二观点,提供一种控制方法,其为如下的脚踏运动系统的控制方法,所述脚踏运动系统具备:踏板单元,其包括一对踏板;器械主体,其以能够旋转的方式对所述踏板单元进行支承;旋转致动器,其使所述踏板单元进行旋转;运动监视传感器,其对使用了所述踏板单元的脚踏运动的有无进行检测,在所述控制方法中,基于所述运动监视传感器的检测结果而对所述脚踏运动是否正在被实施进行判定,在判定为所述脚踏运动未被实施的情况下,以让所述旋转致动器使所述踏板单元进行旋转的方式对所述旋转致动器进行控制。根据以上的方法,由于在用户未实施脚踏运动时所述踏板单元会自动地开始旋转,因此能够作出推动以使用户开始进行脚踏运动。
14、提供一种使计算机执行上述的控制方法的程序。
15、根据本公开的第三观点,提供一种脚踏运动系统,其具备:踏板单元,其包括一对踏板;器械主体,其以能够旋转的方式对所述踏板单元进行支承;落座部,其被构成为,能够进行偏摆旋转或者侧倾旋转;旋转致动器,其使所述落座部进行偏摆旋转或者侧倾旋转;运动监视传感器,其对使用了所述踏板单元的脚踏运动的有无进行检测;控制器,所述控制器在基于所述运动监视传感器的检测结果而判定为所述脚踏运动未被实施的情况下,以让所述旋转致动器使所述落座部进行偏摆旋转或者侧倾旋转的方式对所述旋转致动器进行控制。根据以上的结构,由于在用户没有实施脚踏运动时所述落座部会自动地开始偏摆旋转或者侧倾旋转,因此能够通过骨盆与下肢之间的下方性的运动链,从而作出推动以使用户开始进行脚踏运动。
16、也可以采用如下方式,即,所述控制器在基于所述运动监视传感器的检测结果而判定为所述脚踏运动未被实施的状态持续了第三时间以上的情况下,以让所述旋转致动器使所述落座部进行偏摆旋转或者侧倾旋转的方式对所述旋转致动器进行控制。根据以上的结构,不会总是强迫用户进行脚踏运动,从而能够确保用户进行休息的时间。
17、也可以采用如下方式,即,所述控制器在开始了让所述旋转致动器使所述落座部进行偏摆旋转或者侧倾旋转的控制之后,如果规定的条件成立了,则停止让所述旋转致动器使所述落座部进行偏摆旋转或者侧倾旋转的控制。根据以上的结构,能够作出推动以使用户开始进行脚踏运动,直到规定的条件成立为止。
18、也可以采用如下方式,即,所述规定的条件为,从开始让所述旋转致动器使所述落座部进行偏摆旋转或者侧倾旋转的控制之后起经过第四时间。根据以上的结构,能够作出推动以使用户开始进行脚踏运动,直到经过所述第四时间为止。
19、也可以采用如下方式,即,所述运动监视传感器为,对用户的下肢的动作进行检测的动作检测传感器。
20、也可以采用如下方式,即,所述运动监视传感器为,对所述踏板单元的旋转进行检测的旋转检测传感器。
21、根据本公开的第四观点,提供一种控制方法,其为如下的脚踏运动系统的控制方法,所述脚踏运动系统包括:踏板单元,其包括一对踏板;器械主体,其以能够旋转的方式对所述踏板单元进行支承;落座部,其被构成为,能够进行偏摆旋转或者侧倾旋转;旋转致动器,其使所述落座部进行偏摆旋转或者侧倾旋转;运动监视传感器,其对使用了所述踏板单元的脚踏运动的有无进行检测,在所述控制方法中,基于所述运动监视传感器的检测结果来对所述脚踏运动是否正在被实施进行判定,在判定为所述脚踏运动未被实施的情况下,以让所述旋转致动器使所述落座部进行偏摆旋转或者侧倾旋转的方式对所述旋转致动器进行控制。根据以上的方法,由于在用户没有实施脚踏运动时所述落座部会自动地开始进行偏摆旋转或者侧倾旋转,因此能够通过骨盆与下肢之间的下方性的运动链,从而作出推动以使用户开始进行脚踏运动。
22、提供一种使计算机执行上述的控制方法的程序。
23、发明效果
24、根据本公开,能够在进行脚踏运动时,推动用户以开始进行脚踏运动。
25、本公开的上述和其他目的、特征和优点将从下文给出的详细描述和附图中得到更充分的理解,所述详细描述和附图仅以说明的方式给出,因此不应被认为是对本公开的限制。
- 还没有人留言评论。精彩留言会获得点赞!