一种多航天员协作训练的人体低重力运动力学模拟系统
:本发明属于航天,具体地说,涉及一种航天员低重力运动模拟技术,通过在地面进行低重力模拟训练,使航天员适应在月球,火星等低重力环境下面对各种复杂工况的多人协同工作情况。
背景技术
0、
背景技术:
1、随着我国载人航天事业的发展和探月工程计划的逐步实现,我国即将进行载人登月项目,建立月球基地也变为可能。与地球环境相比,月球环境有着昼夜温差大,太阳辐射强等特点,其中对人体感知最为明显的是月球低重力环境。为了使航天员适应低重力环境下人体运动模式的变化,在地面上进行低重力模拟训练就显得尤为重要。同时,在建立月球基地的过程中,必然会遇到各种复杂的任务,需要多个航天员协作完成,因此,需要在地面上为航天员开展相对应的训练。
2、目前,在地面上进行低重力模拟训练的方法主要有以下几种:抛物线飞行法,中性浮力水池法,悬吊法,虚拟现实法,外骨骼法等。抛物线飞行是实现低重力环境模拟最有效,最真实的方法,可以为人体提供最逼真的低重力体感,在一次典型的抛物线飞行中,飞机以47°的仰角爬升,到达最高点后飞机开始俯冲,俯冲阶段俯角可以达到45°,整个飞行过程持续20-40s,在一次飞行中可以进行20-30次抛物线机动。该方法的成本极高,训练时间短,仅能供航天员进行较为简单的动作训练,同时低重力模拟精度受飞机控制精度的影响。中性浮力水池法利用浮力来平衡重力,也可以通过配重来实现不同重力水平的模拟,到目前为止,是使用最为广泛的低重力模拟方法,该方法不受时间和空间的限制,可以为多个航天员进行长时间协作训练,但水中的阻尼和粘滞效应会对模拟效果产生影响,该方法也对装备的密封性提出了较高的要求。悬挂法是近年来研究较多的低重力模拟方法,通过绳索将人体悬吊起来,改变绳索的拉力来平衡掉任意比例的重力。nasa研制的部分重力模拟器(pogo)、主动重力响应卸载系统(argos)和零重力运动模拟器(zls)都采用了上述原理,该方法一般只能实现全身的重力平衡,对于四肢重力矩的平衡通常需要配合外骨骼来实现,且该方法需要不断调节绳索的拉力,对控制系统提出了高的要求。虚拟现实法一般仅针对视觉和听觉进行环境模拟,无法为航天员提供真实的低重力体感,通常作为辅助手段与其它低重力模拟方法协同使用。近年来,出现了一种基于无能量系统的被动外骨骼重力平衡装置,可以实现任意水平的低重力模拟,但现存的低重力模拟外骨骼系统往往只能为穿戴者提供有限的运动范围,穿戴者只有2-3个自由度,仅能在跑步机上进行步行训练,难以完成复杂的,需要多航天员协同进行的工作。
技术实现思路
0、
技术实现要素:
1、本发明是为了解决上述现有技术存在的问题而提供一种多航天员协作训练的人体低重力运动力学模拟系统。
2、一种多航天员协作训练的人体低重力运动力学模拟系统,包括
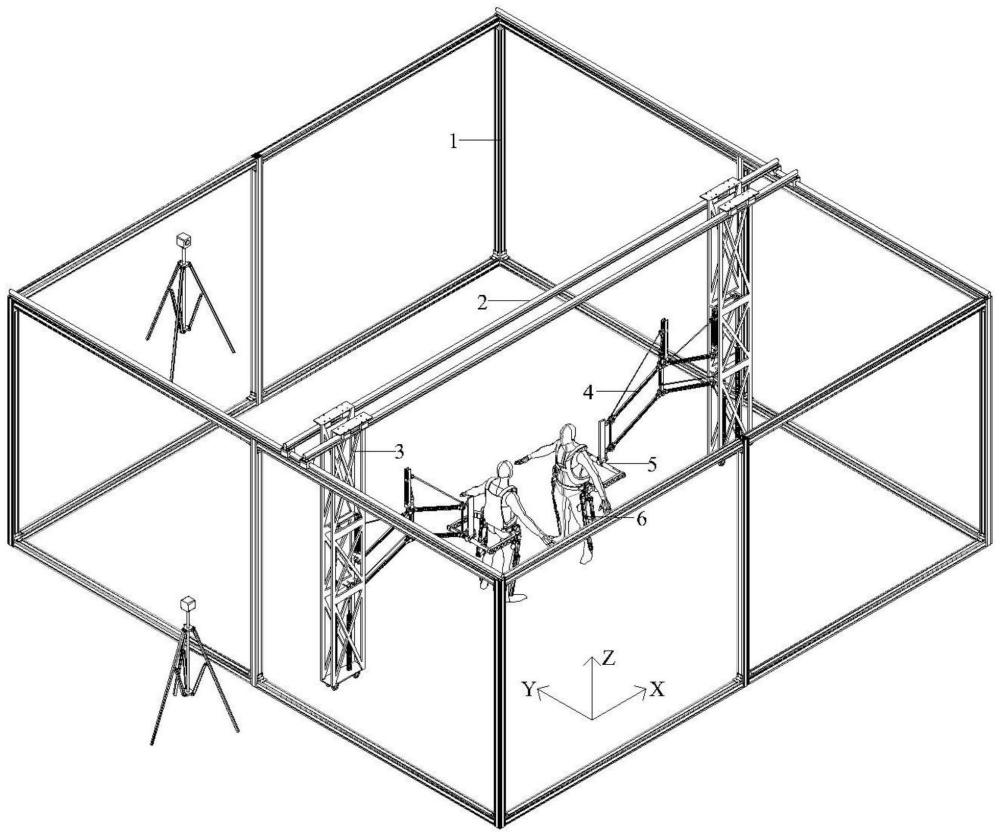
3、龙门架,所述龙门架为四方形框体,龙门架内设有可沿任意方向移动的支撑框架;所述支撑框架上设有第一弹簧、第二弹簧和第一变向滑轮和第二变向滑轮,所述第一弹簧和第二弹簧均一端连接在支撑框架上;
4、全身重力平衡机构,所述全身重力平衡机构包括双平行四边形机构,传动机构;所述双平行四边形机构由共用一边的两个平行四边形框体组成,且平行四边形框体的任意相邻两边角度可随意调节,所述双平行四边形机构共用边的一条平行边竖直设置在支撑框架上,另一条平行边上设置有多个连接块;所述传动机构包括调节机构、第一牵引线和第二牵引线,所述调节机构设置在双平行四边形机构共用边的顶端,且调节机构内设有可调节高度的定滑轮,所述第一牵引线一端连接在双平行四边形机构与支撑框架连接的平行四边形框体上,另一端绕过第一变向滑轮后,另一端通过第一弹簧与支撑框架弹性连接;所述第二牵引线一端连接在远离支撑框架一侧的平行四边形框体上,绕过定滑轮和第二变向滑轮后另一端通过第二弹簧与支撑框架弹性连接;
5、背部支撑机构,所述背部支撑机构包括连接框架和人体固定背带,所述连接框架转动连接在连接块上,人体固定背带转动连接在连接框架内,用于固定人体上肢;
6、下肢重力平衡外骨骼,包括下肢支承结构和下肢弹性机构,所述下肢支承结构包括所述下肢重力平衡外骨骼由髋关节安装板,髋关节大腿承力板,大腿平衡杆,髋关节大腿杆,第二大腿平衡杆,小腿过渡板,小腿平衡杆,大腿平行四边形短杆,第二大腿平行四边形短杆,膝关节弹簧安装板组成;所述髋关节安装板固定连接在连接框架上,所述髋关节大腿承力板和髋关节大腿杆分别通过轴五和轴六转动连接在髋关节安装板上,髋关节大腿承力板与所述大腿平衡杆螺栓连接;小腿过渡板转动连接在大腿平衡杆底部,小腿平衡杆与小腿过渡板螺栓连接;所述第二大腿平衡杆与髋关节大腿杆螺栓连接;大腿平衡杆上设有轴二和轴三,第二大腿平衡杆上设有轴一和轴四,所述大腿平行四边形短杆两端转动连接在轴三和轴四上,第二大腿平行四边形短杆两端转动连接在轴二和轴三上,所述膝关节弹簧安装板为v形板,且v形一边的两端转动连接在轴一和轴二上,另一边始终与地面垂直;轴一、轴二、轴三、轴四、轴五、轴六六点形成两个共用一边的平行四边形;所述下肢弹性结构,包括大腿平衡弹簧、大腿平衡牵引线、大腿滑轮、小腿平衡弹簧、小腿平衡牵引线、小腿滑轮,所述大腿滑轮设置在第二大腿平衡杆上,所述大腿平衡牵引线一端固定在髋关节安装板上,另一端绕过大腿滑轮连接大腿平衡弹簧的一端,所述大腿平衡弹簧的另一端固定在大腿平衡杆的底部;小腿滑轮设置在小腿平衡杆上,所述小腿平衡牵引线一端固定在膝关节弹簧安装板上,另一端绕过小腿滑轮连接小腿平衡弹簧的一端,所述小腿平衡弹簧的另一端固定在小腿平衡杆底部。
7、进一步地,所述第一牵引线的另一端连接在所述第一弹簧未与支撑框架连接的一端;所述第二牵引线的另一端连接在所述第二弹簧未与支撑框架连接的一端。
8、进一步地,还包括第一动滑轮和第二动滑轮,所述第一动滑轮、第二动滑轮分别连接在所述第一弹簧、第二弹簧未与支撑框架连接的一端;所述第一牵引线的另一端从上方绕过第一动滑轮后连接在支撑框架上;所述第二牵引线的另一端从上方绕过第二动滑轮连接在固定在支撑框架上。
9、进一步地,所述定滑轮和第二变向滑轮的连线与双平行四边形机构和支撑框架相连的边平行。
10、进一步地,所述弹性支承机构还包括第一动滑轮,第二动滑轮和多个变向滑轮,所述第一动滑轮,第二动滑轮均通过弹簧连接支撑框架的底端;所述第一牵引线绕过变向滑轮后,从上方绕过第一动滑轮连接在固定在支撑框架上;所述第二牵引线绕过变向滑轮后,从上方绕过第二动滑轮连接在固定在支撑框架上。
11、进一步地,所述调节机构包括固定板,固定板的一端设置有固定块,所述固定板通过固定块竖直固定在双平行四边形机构上;所述固定板内部开槽转动连接有丝杆,丝杆上设有滑动块,且一端设有手轮,所述滑动块上固定有定滑轮,转动手轮即可调节定滑轮高度。
12、进一步地,连接框架包括连杆一,所述连杆一一侧设有多个连接柱,连杆一通过连接柱与连接块转动连接;连杆一底部设有连接器,所述连接器上有两个相互垂直的开孔,分别穿有连接杆和连杆二;所述连杆二两端固定两根连杆三,所述两根连杆三均一端连接在连杆二,另一端设有人机连接板,所述人体固定左右背带两端连接在两个人机连接板上。
13、进一步地,所述髋关节大腿承力板上设有螺纹槽和多个螺纹孔,所述大腿平衡杆可通过螺栓固定在螺纹槽和多个螺纹孔上,且大腿平衡杆可调节与髋关节大腿承力板固定的相对位置。
14、进一步地,所述龙门架设有横梁和纵梁,横梁上设有滑轨,两侧滑轨间设有随动梁,所述随动梁两端通过y轴随动滑块连接在滑轨上,所述支撑框架顶部设有x轴随动滑块,随动梁上设有与x轴随动滑块相匹配的滑槽。
15、本发明具有如下有益效果:
16、采用无源被动的重力平衡方式,无需复杂的控制系统即可平衡掉人体任意比例的重力,系统结构简单,安全可靠。
17、工作空间大,自由度多,理论上,该发明的工作空间取决于龙门架的尺寸,并且为人体提供了六个自由度,可以供航天员进行多人协同作业训练和人机混合作业训练。
18、实施难度低,现有技术中需要严格保持吊绳垂直通过训练人员的质心和吊绳的张力,否则减重效果就会失真,且柔性绳索造成的运动滞后和柔性抖动等因素都会对低重力看模拟效果产生影响,而本发明无需精确的运动跟踪和力控制技术,只需将支撑框架的位置调节到最佳工作空间内即可,且调节过程不会对人体低重力模拟效果产生影响。
- 还没有人留言评论。精彩留言会获得点赞!