一种梭壳梭芯自动去线绕线一体三轴机器人的制作方法
1.本实用新型涉及绣花机领域,具体为一种梭壳梭芯自动去线绕线一体三轴机器人。
背景技术:
2.本申请人于2020年07月07日公告的cn111379094a的中国发明专利就公开了一种梭壳梭芯分离式自动去线绕线一体设备及工艺方法,本发明提供梭壳梭芯分离式自动去线绕线一体设备及工艺方法,旨在克服现有技术中的梭芯余线去除重新绕线工作,以及梭芯梭壳装配梭壳绕线工作,需要人工完成的不足之处,提供对于梭芯去余线、梭芯绕线、梭壳绕线、梭芯梭壳装配、卡线、断线的一系列自动化工作,替代原本需要人工完成的繁琐工作的自动化设备。其结构包括基台和设置在基台上的主板,基台在主板的相对位置设有抓取装置,所述主板上设绕线装置、去线装置、供线装置和断线机构;绕线装置包括可驱动梭芯旋转的绕线主轴、驱动绕线主轴旋转的主轴驱动电机、活动顶头以及旋转绕线器;去线装置包括去线轮组件、分离拨线片和吸线机构。
3.该专利中,绕线装置与去线装置在两个固定点之间往复运动,在储料盘统、盘体尺寸统一且不更变的情况下,具有动作迅速,且行程不出错,机械臂抓取梭壳准确无误。
4.但是,一旦储料盘的尺寸进行略微修改,或者盘体尺寸进行了更换或微调,则原先的路径难以适用于调整,若盘体尺寸调整较大,则旧的往复运动的路径还需要重新设计,因此存在活动上的局限性。
技术实现要素:
5.本实用新型的目的是为了提供一种梭壳梭芯自动去线绕线一体三轴机器人,本实用新型解决了现有版本中绕线装置与去线装置无法调整位置的问题,采用三轴机器人,可以通过编程的方式设定坐标位置,以软件调整的形式对机器人的空间位置进行调整。
6.为了实现上述发明目的,本实用新型采用了以下技术方案:
7.一种梭壳梭芯自动去线绕线一体三轴机器人,包括支架、机械抓手和活动顶头三轴活动装置,所述三轴活动装置包括水平活动机构、升降机构、绕线伸缩机构和抓取伸缩机构,绕线伸缩机构与活动顶头连接,抓取伸缩机构与机械抓手连接,水平活动机构和升降机构,用于机械抓手在储料盘和绕线主轴之间分别对准并转移梭壳,同时用于活动顶头对准绕线主轴;绕线伸缩机构,用于将活动顶头压紧在绕线主轴上;抓取伸缩机构,用于机械抓手从储料盘或绕线主轴上取拿梭壳。
8.优选的,水平活动机构包括水平滑轨、水平滑块和水平驱动器,水平滑轨固定在支架上,水平滑块沿水平滑轨活动;升降机构包括竖直滑轨、竖直滑块和竖直驱动器,竖直滑轨固定在水平滑块上,竖直滑块沿竖直滑轨活动;机械抓手、活动顶头、绕线伸缩机构和抓取伸缩机构均固定于竖直滑块上。
9.优选的,水平驱动器包括丝杆和电机,水平滑块上设有与丝杆适配的内螺纹。
10.优选的,竖直驱动器包括丝杆和电机,竖直滑块上设有与丝杆适配的内螺纹。
11.优选的,升降机构还包括竖直架,所述电机设置于竖直架靠近水平滑块的下表面,丝杆位于对侧竖直架的下表面,丝杆与电机之间通过传动机构连接。
12.优选的,绕线伸缩机构和/或抓取伸缩机构包括丝杆、滑块、滑轨和电机,滑块设有与丝杆配合的内螺纹,电机带动丝杆旋转驱动滑块沿滑轨伸缩活动。
13.优选的,支架上设有盘体、驱动装置和用于梭壳锁芯存储的储料盘,盘体可拆卸的设置有至少两个及以上的储料盘,所述盘体在支架上旋转活动,所述驱动装置包括主驱动器和次驱动器,主驱动器用于盘体活动以到达机械抓手位置;次驱动器用于储料盘沿中心周向转动并对准机械抓手。
14.优选的,储料盘的数量与次驱动器的数量一一对应。
15.与现有技术相比,采用了上述技术方案的梭壳梭芯自动去线绕线一体三轴机器人,具有如下有益效果:
16.采用本实用新型的梭壳梭芯自动去线绕线一体三轴机器人,采用三轴设计,可以避免两轴设计时只能对两个点进行往复,而无法有更多的操作,而三轴设计,可以采用坐标的形式,对三轴机器人设计更多的操作和功能。
17.即盘体或储料盘有所调整,操作人员可以通过以编程的形式,将机器人针对梭壳的抓取位置进行相应的调整,调整更为自由且快捷。
附图说明
18.图1为本实用新型梭壳梭芯自动去线绕线一体三轴机器人实施例的结构示意图。
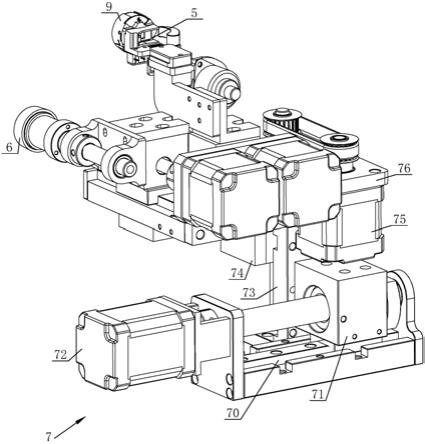
19.图2为实施例中梭壳梭芯自动去线绕线一体三轴机器人的结构示意图。
20.图3为实施例中梭壳梭芯分离式自动去线绕线一体设备的结构示意图。
21.图4为实施例中梭壳梭芯分离式自动去线绕线一体设备的结构示意图。
22.附图标记:1、支架;2、盘体;31、主驱动器;32、次驱动器;4、储料盘;5、机械转手;6、活动顶头;7、三轴活动装置;70、水平滑轨;71、水平滑块;72、水平驱动器;73、竖直滑轨;74、竖直滑块;75、竖直驱动器;76、竖直架。
具体实施方式
23.下面结合附图对本实用新型做进一步描述。
24.如图1至4所示的梭壳梭芯自动去线绕线一体三轴机器人,一种梭壳梭芯自动去线绕线一体三轴机器人,包括支架1、机械抓手5和活动顶头6,还包括三轴活动装置7,所述三轴活动装置7包括水平活动机构、升降机构、绕线伸缩机构和抓取伸缩机构,绕线伸缩机构与活动顶头6连接,抓取伸缩机构与机械抓手5连接,水平活动机构和升降机构,用于机械抓手5在储料盘4和绕线主轴8之间分别对准并转移梭壳9,同时用于活动顶头6对准绕线主轴8;绕线伸缩机构,用于将活动顶头6压紧在绕线主轴8上;抓取伸缩机构,用于机械抓手5从储料盘4或绕线主轴8上取拿梭壳9。
25.水平活动机构包括水平滑轨70、水平滑块71和水平驱动器72,水平滑轨70固定在支架1上,水平滑块71沿水平滑轨70活动升降机构包括竖直滑轨73、竖直滑块74和竖直驱动器75,竖直滑轨73固定在水平滑块71上,竖直滑块74沿竖直滑轨73活动;机械抓手5、活动顶
头6、绕线伸缩机构和抓取伸缩机构均固定于竖直滑块74上。
26.水平驱动器72包括丝杆和电机,水平滑块71上设有与丝杆适配的内螺纹。竖直驱动器75包括丝杆和电机,竖直滑块74上设有与丝杆适配的内螺纹。升降机构还包括竖直架76,所述电机设置于竖直架76靠近水平滑块71的下表面,丝杆位于对侧竖直架76的下表面,丝杆与电机之间通过传动机构连接。绕线伸缩机构和/或抓取伸缩机构包括丝杆、滑块、滑轨和电机,滑块设有与丝杆配合的内螺纹,电机带动丝杆旋转驱动滑块沿滑轨伸缩活动。
27.支架1上设有盘体、驱动装置和用于梭壳9锁芯存储的储料盘4,盘体2可拆卸的设置有至少两个及以上的储料盘4,所述盘体2在支架1上旋转活动,所述驱动装置包括主驱动器31和次驱动器32,主驱动器31用于盘体2活动以到达机械抓手5位置;次驱动器32用于储料盘4沿中心周向转动并对准机械抓手5,储料盘4的数量与次驱动器32的数量一一对应。
28.以上所述是本实用新型的优选实施方式,对于本领域的普通技术人员来说不脱离本实用新型原理的前提下,还可以做出若干变型和改进,这些也应视为本实用新型的保护范围。
技术特征:
1.一种梭壳梭芯自动去线绕线一体三轴机器人,包括支架(1)、机械抓手(5)和活动顶头(6),其特征在于:还包括三轴活动装置(7),所述三轴活动装置(7)包括水平活动机构、升降机构、绕线伸缩机构和抓取伸缩机构,绕线伸缩机构与活动顶头(6)连接,抓取伸缩机构与机械抓手(5)连接,水平活动机构和升降机构,用于机械抓手(5)在储料盘(4)和绕线主轴(8)之间分别对准并转移梭壳(9),同时用于活动顶头(6)对准绕线主轴(8);绕线伸缩机构,用于将活动顶头(6)压紧在绕线主轴(8)上;抓取伸缩机构,用于机械抓手(5)从储料盘(4)或绕线主轴(8)上取拿梭壳(9)。2.根据权利要求1所述的梭壳梭芯自动去线绕线一体三轴机器人,其特征在于:水平活动机构包括水平滑轨(70)、水平滑块(71)和水平驱动器(72),水平滑轨(70)固定在支架(1)上,水平滑块(71)沿水平滑轨(70)活动;升降机构包括竖直滑轨(73)、竖直滑块(74)和竖直驱动器(75),竖直滑轨(73)固定在水平滑块(71)上,竖直滑块(74)沿竖直滑轨(73)活动;机械抓手(5)、活动顶头(6)、绕线伸缩机构和抓取伸缩机构均固定于竖直滑块(74)上。3.根据权利要求2所述的梭壳梭芯自动去线绕线一体三轴机器人,其特征在于:水平驱动器(72)包括丝杆和电机,水平滑块(71)上设有与丝杆适配的内螺纹。4.根据权利要求2所述的梭壳梭芯自动去线绕线一体三轴机器人,其特征在于:竖直驱动器(75)包括丝杆和电机,竖直滑块(74)上设有与丝杆适配的内螺纹。5.根据权利要求4所述的梭壳梭芯自动去线绕线一体三轴机器人,其特征在于:升降机构还包括竖直架(76),所述电机设置于竖直架(76)靠近水平滑块(71)的下表面,丝杆位于对侧竖直架(76)的下表面,丝杆与电机之间通过传动机构连接。6.根据权利要求2所述的梭壳梭芯自动去线绕线一体三轴机器人,其特征在于:绕线伸缩机构和/或抓取伸缩机构包括丝杆、滑块、滑轨和电机,滑块设有与丝杆配合的内螺纹,电机带动丝杆旋转驱动滑块沿滑轨伸缩活动。7.根据权利要求1所述的梭壳梭芯自动去线绕线一体三轴机器人,其特征在于:支架(1)上设有盘体、驱动装置和用于梭壳(9)锁芯存储的储料盘(4),盘体(2)可拆卸的设置有至少两个及以上的储料盘(4),所述盘体(2)在支架(1)上旋转活动,所述驱动装置包括主驱动器(31)和次驱动器(32),主驱动器(31)用于盘体(2)活动以到达机械抓手(5)位置;次驱动器(32)用于储料盘(4)沿中心周向转动并对准机械抓手(5)。8.根据权利要求7所述的梭壳梭芯自动去线绕线一体三轴机器人,其特征在于:储料盘(4)的数量与次驱动器(32)的数量一一对应。
技术总结
本实用新型公开了一种梭壳梭芯自动去线绕线一体三轴机器人,包括支架、机械抓手、活动顶头、三轴活动装置,所述三轴活动装置包括水平活动机构、升降机构、绕线伸缩机构和抓取伸缩机构,绕线伸缩机构与活动顶头连接,抓取伸缩机构与机械抓手连接,水平活动机构和升降机构,用于机械抓手在储料盘和绕线主轴之间分别对准并转移梭壳,同时用于活动顶头对准绕线主轴;绕线伸缩机构,用于将活动顶头压紧在绕线主轴上;抓取伸缩机构,用于机械抓手从储料盘或绕线主轴上取拿梭壳。本实用新型解决了现有版本中绕线装置与去线装置无法调整位置的问题,采用三轴机器人,可以通过编程的方式设定坐标位置,以软件调整的形式对机器人的空间位置进行调整。置进行调整。置进行调整。
技术研发人员:徐海苗
受保护的技术使用者:诸暨轻工时代机器人科技有限公司
技术研发日:2020.12.18
技术公布日:2021/9/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1