晾晒控制方法、系统、介质和设备与流程
本技术涉及晾晒控制,具体涉及晾晒控制方法、系统、介质和设备。
背景技术:
1、智能晾衣机由于能够实现自动升降,并集成照明、烘干、杀菌等功能,越来越受到人们的青睐,俨然已成为智能家居产品中不可缺少的部分。
2、目前,市面上的晾衣机,用于挂置衣架的挂孔一般都是沿着晾杆长度方向设置,用户晾晒时需要将衣架一个个依次挂在各个挂孔上,当需要收取衣物时,也是需要用户将衣架一个个依次从各挂孔上取下来,因此在收衣和晒衣过程中,用户需要不断移动位置才能外出晾晒,严重影响了晒衣和收衣的速度。现有技术中,也出现了一些快速收衣的技术,具体是在晾杆上加上滑轨,用户通过手动推动或拉动滑轨的方式使得衣架聚拢或展开,从而实现快速收衣,但是这种方式下,为聚拢或展开衣架,用户仍然需要沿着晾杆长度方向移动一定位置,并且在衣物数量较多的情况下,推动或拉动滑轨需要花费一定力气,不适合老人或儿童使用,存在费时费力的问题,因此用户晾晒效率仍然较低。
技术实现思路
1、本发明的第一目的在于克服现有技术的缺点与不足,提供一种晾晒控制方法,该晾晒控制方法能够自动且快速实现晾杆上的衣物聚拢和展开,实现快速收衣和晒衣,有效提高用户晾晒效率。
2、本发明的第二目的在于提供一种晾晒控制系统。
3、本发明的第三目的在于提高一种晾衣机。
4、本发明的第四目的在于提高一种存储介质。
5、本发明的第五目的在于提高一种电子设备。
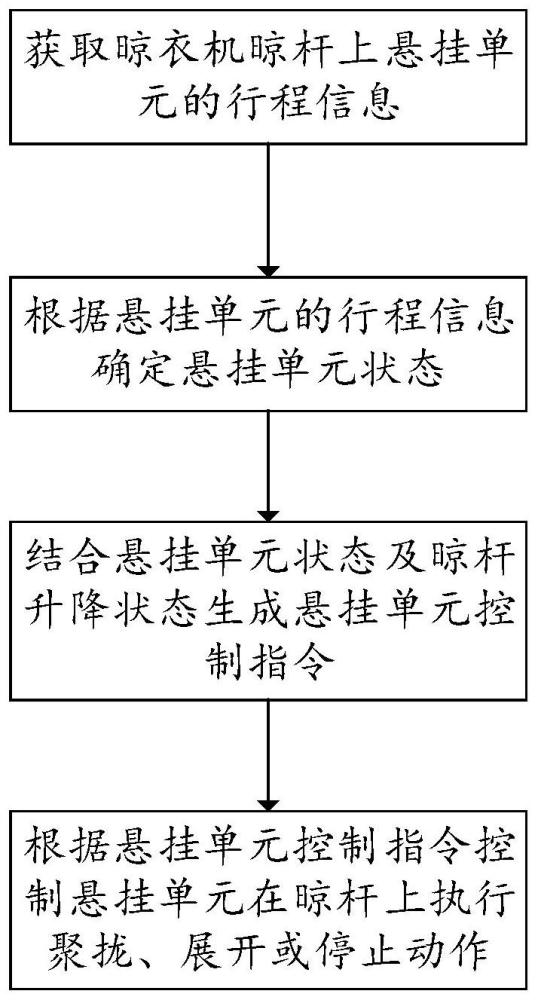
6、本发明的第一目的通过下述技术方案实现:一种晾晒控制方法,应用于晾衣机上,包括:
7、获取晾衣机晾杆上悬挂单元的行程信息;
8、根据悬挂单元的行程信息确定悬挂单元状态,所述悬挂单元状态包括悬挂单元聚拢状态和展开状态;
9、结合悬挂单元状态及晾杆升降状态生成悬挂单元控制指令;
10、根据悬挂单元控制指令控制悬挂单元在晾杆上执行聚拢、展开或停止动作。
11、优选的,所述生成悬挂单元控制指令并且根据悬挂单元控制指令控制悬挂单元在晾杆上执行聚拢、展开或停止动作的具体过程包括:
12、当悬挂单元状态为展开状态,若接收到晾杆下降控制指令,则执行以下操作:
13、生成悬挂单元聚拢控制指令,在晾杆下降之前控制悬挂单元在晾杆上执行聚拢动作,悬挂单元聚拢完成后,控制晾杆下降;或者,生成悬挂单元聚拢控制指令,在晾杆下降过程中同时控制悬挂单元在晾杆上执行聚拢动作,直至聚拢完成;或者,生成悬挂单元聚拢控制指令,在晾杆下降完成后控制悬挂单元在晾杆上执行聚拢动作,直至聚拢完成;
14、当悬挂单元状态为聚拢状态,若接收到晾杆上升控制指令,则执行以下操作:
15、生成悬挂单元展开控制指令,在晾杆上升到晾晒位置时控制悬挂单元在晾杆上执行展开动作,直至展开完成;或者,生成悬挂单元展开控制指令,在晾杆上升过程中同时控制悬挂单元在晾杆上执行展开动作,直至展开完成;或者,生成悬挂单元展开控制指令,在晾杆上升之前控制悬挂单元在晾杆上执行展开动作,悬挂单元展开完成后,控制晾杆上升。
16、优选的,还包括:
17、接收悬挂单元聚拢触发指令、展开触发指令或停止触发指令;
18、根据悬挂单元聚拢触发指令、展开触发指令或停止触发指令,生成悬挂单元控制指令,以控制指令控制悬挂单元在晾杆上执行聚拢、展开或停止动作。
19、优选的,晾衣机晾杆上悬挂单元的行程信息通过以下任一种方式确定:
20、第一种:
21、确定悬挂单元在晾杆上从完全聚拢到完全展开或从完全展开到完全聚拢时,霍尔传感器所产生的方波总数n;其中,晾杆上悬挂单元连接驱动系统,在驱动系统中电机带动下在晾杆上移动;所述霍尔传感器设置在电机转动路径上,用于检测驱动系统中电机转动;
22、检测悬挂单元从完全聚拢或展开状态开始移动时,霍尔传感器采集到的方波数量n,然后根据方波数量n相对方波总数n的占比确定悬挂单元在晾杆上的行程信息;
23、第二种:
24、获取悬挂单元所连接驱动系统中电机转动一圈时,带动悬挂单元在晾杆上移动的距离s;其中,与悬挂单元连接的驱动系统中,通过电机带动悬挂单元在晾杆上移动;
25、通过电机转动路径上设置的霍尔传感器检测电机转动圈数;
26、根据电机转动圈数以及距离s确定悬挂单元在晾杆上的行程信息;
27、第三种:
28、获取位置检测单元检测到的位置信息,其中位置检测单元设置在晾杆上用于检测悬挂单元的位置;
29、根据位置检测单元检测到的位置信息确定悬挂单元的行程信息。
30、优选的,还包括:
31、当悬挂单元控制指令为悬挂单元聚拢控制指令时,在悬挂单元移动过程中,通过霍尔传感器检测驱动系统中电机转动方向是否为第一转动方向,若否,则控制驱动系统中电机停止转动,然后控制电机切换为第一转动方向,以通过电机带动悬挂单元执行聚拢动作;
32、当悬挂单元控制指令为悬挂单元展开控制指令时,在悬挂单元移动过程中,通过霍尔传感器检测驱动系统中电机转动方向是否为第二转动方向,若否,则控制驱动系统中电机停止转动,然后控制电机切换为第二转动方向,以通过电机带动悬挂单元执行展开动作;
33、其中,晾杆上悬挂单元连接驱动系统,在驱动系统中电机带动下在晾杆上移动;所述霍尔传感器包括设置在电机转动路径上的第一霍尔传感器和第二霍尔传感器,根据第一霍尔传感器和第二霍尔传感器产生检测信号的顺序确定电机转动方向。
34、优选的,还包括:悬挂单元同步控制步骤;其中,晾衣机各晾杆上分别设置有悬挂单元,各悬挂单元分别连接驱动系统,在驱动系统中各电机带动下在各晾杆上移动;驱动系统中各电机转动路径上分别设置有霍尔传感器,通过霍尔传感器产生的检测信号确定电机转动速度;
35、所述悬挂单元同步控制步骤为:
36、接收驱动系统中各电机转动路径上霍尔传感器采集到的信号;
37、针对驱动系统中各电机,根据其转动路径上霍尔传感器采集到的信号检测出电机转动速度;
38、检测各电机转动速度是否相同,在不同的情况下,通过反馈控制算法调节各电机转动速度,直至各电机转动速度相同。
39、优选的,在悬挂单元停止移动时、悬挂单元行程信息更新时以及悬挂单元的驱动系统通电状态下,获取悬挂单元的行程信息并且进行存储。
40、本发明的第二目的通过下述技术方案实现:一种晾晒控制系统,包括控制器、驱动系统、行程检测单元和悬挂单元;
41、所述悬挂单元设置在晾杆上,并且连接驱动系统,在驱动系统的带动下在晾杆上移动;
42、所述行程检测单元连接控制器,用于检测悬挂单元在晾杆上的行程信息;
43、所述驱动系统连接控制器,由控制器控制其工作状态;
44、所述控制器,用于执行权利要求1~7中任一项所述的晾晒控制方法。
45、优选的,所述控制器包括相互连接的第一控制器和第二控制器;所述第二控制器为晾衣机主控器;
46、所述第一控制器,用于获取晾衣机晾杆上悬挂单元的行程信息,并且发送给第二控制器;用于根据悬挂单元控制指令控制悬挂单元在晾杆上执行聚拢、展开或停止动作;
47、所述第二控制器,用于根据悬挂单元的行程信息确定悬挂单元状态;,用于结合悬挂单元状态及晾杆升降状态生成悬挂单元控制指令,并且发送给第一控制器。
48、本发明的第三目的通过以下技术方案实现:一种晾衣机,包括本发明第二目的所述的晾晒控制系统。
49、本发明的第四目的通过以下技术方案实现:一种电子设备,包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明第一目的所述的晾晒控制方法。
50、本发明的第五目的通过以下技术方案实现:一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现本发明第一目的所述的晾晒控制方法。
51、本发明相对于现有技术具有如下的优点及效果:
52、(1)本发明一种晾晒控制方法,首先获取晾衣机晾杆上悬挂单元的行程信息;根据悬挂单元的行程信息确定悬挂单元状态,其中,悬挂单元状态包括悬挂单元聚拢状态和展开状态;结合悬挂单元状态及晾杆升降状态生成悬挂单元控制指令;根据悬挂单元控制指令控制悬挂单元在晾杆上执行聚拢、展开或停止动作。由此可见,本发明方法能够结合悬挂单元状态以及晾杆升降状态实现对悬挂单元的自动聚拢、展开以及停止的控制,基于此,当用户晾晒后,能够实现自动对悬挂单元进行展开,而在用户需要收衣物时,能够自动对悬挂单元进行聚拢,实现快速收衣和晒衣,有效提高了晾晒效率,进一步提高了用户体验;相比现有技术,使得晾衣机受用群体更广,给用户带来了更大的方便。
53、(2)本发明晾晒控制方法中,对于晾杆下降脱离主机后不能通电的晾衣机,在用户晾晒完成触发晾杆上升后,可以控制晾杆在上升到晾晒位置并且得电后控制悬挂单元展开;而对于晾杆下降脱离主机后仍然可通电的晾衣机,在用户晾晒完成触发晾杆上升后,可以控制晾杆在上升过程中悬挂单元执行展开动作;另外,对于晾杆下降脱离主机后不能通电的晾衣机,当用户需要收衣而触发晾杆下降时,可以先将悬挂单元进行聚拢,然后控制晾杆下降;而对于晾杆下降脱离主机后仍然可通电的晾衣机,当用户需要收衣而触发晾杆下降时,可以在晾杆下降过程中同时控制悬挂单元执行聚拢动作。由此可见,本发明方法适合于不同类型的晾衣机使用,在晾衣机晾杆能够实时通电情况下,可以在晾杆升降过程中同时进行悬挂单元的展开或聚拢控制,进一步节省了用户晾衣和收衣时间。
54、(3)本发明晾晒控制方法中,还包括接收悬挂单元聚拢触发指令、展开触发指令或停止指令的步骤;基于此,本发明方法能够实现通过外部触发指令,例如是晾衣机或者遥控设备上设置的按键实现悬挂单元的聚拢、展开、停止动作,使得用户能够实现对悬挂单元的自主控制和调节,为用户使用晾衣机带来了更大的方便。
55、(4)本发明晾晒控制方法中,悬挂单元在晾杆上的行程信息可以由控制悬挂单元的驱动系统中电机工作状态来确定,具体的,先确定悬挂单元从完全聚拢到完全展开或从完全展开到完全聚拢的整个行程时,电机转动所导致其转动路径上霍尔传感器能够检测到的方波总数n,在接下来悬挂单元的移动中,可以基于霍尔传感器检测到的方波数n相对n的占比确定悬挂单元在晾杆上的位置,也即对应行程信息;另外,也可以在晾杆上设置位置检测单元等器件,基于位置检测单元检测悬挂单元的位置从而确定出行程信息。基于此,本发明能够非常快捷方便的确定悬挂单元的行程,从而基于该行程能够判定出悬挂单元状态。
56、(5)本发明晾晒控制方法中,在控制悬挂单元聚拢和展开时,可以通过电机转动路径上设置的两个霍尔传感器检测驱动系统中电机转动方向。从而判定要控制的电机转动方向是否与实际转动方向相一致,在不一致时调整电机转动方向;本发明上述方法实现了在电机接线接反时能够实时发现,并且能够直接通过软件处理变换电机控制方向,解决了现有技术电机接线接反而需要拆机重换接线方向的操作。
57、(6)本发明晾晒控制方法中,当晾衣机有多根晾杆上,还包括悬挂单元同步控制步骤,具体针对各晾杆上驱动悬挂单元移动的各电机,分别通过电机转动路径上的霍尔传感器检测电机转动速度,在各电机转动速度不一致情况下,将检测到的电机转动速度通过反馈控制算法调节,确保各电机转速同步。本发明上述操作能够有效避免晾衣机各条晾杆挂重不同时、滑轨轨道摩擦力受力不同时或电机差异引起的驱动力不同时,所导致的各电机在同样的驱动功率下转动速度却不同的现象发生。
58、(7)本发明晾晒控制方法中,在悬挂单元停止移动时、悬挂单元行程信息更新时以及在悬挂单元通电状态下,获取悬挂单元的行程信息并且进行存储。本发明上述操作能保证悬挂单元上电后能获取到上一次断电前的行程信息,做到更智能化的控制效果,如上一次断电前行程信息保持聚拢百分比为100%的,则在下一次上电后,根据上一次行程信息直接做展开控制。否则,若无存储行程信息的操作,无法获知上一次断电前的行程位置,在执行聚拢控制指令时就有可能产生多次堵转的现象,影响电机寿命。
- 还没有人留言评论。精彩留言会获得点赞!