一种智能化自动抹灰机的制作方法
一种智能化自动抹灰机
1.本技术涉及抹墙机技术领域,具体的,本技术涉及一种智能化自动抹灰机(粉墙机、喷涂机、收平机)。
背景技术:
2.我国的建筑领域与经济发达国家相比还有着不小的差距,主要表现在施工作业的整体水平、装备的技术条件和工人的技能素质等方面,施工施工过程中大量采用人力劳动。
3.在建筑装饰工程中墙面抹灰能够占到总工期的一半甚至更多,工作量比较大,而且对工作质量要求也较高。人工进行涂抹,存在诸多问题,比如工作强度大、作业时间长,以及由于工人自身的能力不同导致抹灰质量无法控制等。抹灰机能够代替人工对毛坯墙面进行上料、抹灰、压光等一系列工作,因此抹灰机已经在建筑装饰工程中得到了广泛应用。
4.目前已知的抹灰机主要有三种:喷涂式抹灰机、半自动抹灰机、全自动抹灰机。喷涂式抹灰机多用于外墙面抹灰,自动化抹灰机则用于内墙面抹灰。不同的抹灰机各有其优缺点,尤其是抹灰效果参差不齐,所以对抹灰机的改进工作也一直不断的进行。
5.已知的一种由机械、液压和电气控制系统组成的抹灰机,如图1所示,该抹灰机械通过液压系统中的液压泵将灰浆输送到灰浆工作盘上,由旋转工作盘将灰浆均匀的抹到墙面上在一定程度上提高了抹灰效率。但是机械结构过于复杂,机械故障率高,抹灰效果不好,体积过大。
6.已知的cn02222628.1公开一种组合铲式抹灰机,包括升降架、送灰装置、抹灰装置,送灰装置由铲式砂灰箱和与之配套的灰胶带组成,灰胶带一端固定于砂灰箱两侧的臂杆上,另一端接恒压钢绳;有恒压装置与送灰装置连接,恒压装置由离合器带动恒压搅盘经恒压钢绳连接送灰装置的送灰胶带对灰砂进行恒压;抹灰装置为铲式砂灰箱开口方设置的抹灰厚度调整杆和铲口压平铁板组成。还有补灰搓平装置,由电动机、减速器带动内螺形筒轴、弹性皮盘、砂板组成。该专利较早记载了在抹灰机中使用补灰搓平装置,其虽然具有补灰功能,但使用过程复杂,需要取下砂灰箱安装上补灰搓平装置。并且该专利技术的补灰搓平装置结构复杂,成本高,实际使用效率低。
7.已知的cn202110835250.7公开一种抹灰机器人,包括机架,所述机架的前端设有升降装置,所述升降装置上设有刮刀,所述机架的底部设有移动装置,所述升降装置朝向所述机架的一侧连接有与升降装置垂直的连接板,所述连接板固定连接水平微调装置的上表面,所述水平微调装置的下表面与所述机架的上表面固定连接。其解决了现有的抹灰机器人将升降装置竖直固定于机器人上,导致安装刮刀的升降装置与机器人之间不能进行精准微调的问题。但其整体重量大,移动不便。
8.现有的抹灰机存在诸多需要改进的问题,比如:(1)结构复杂,整体上下移动,重量大,移动不便。(2)相邻两次抹灰衔接处理不足。(3)支撑杆变形,抹灰、压光不均匀。(4)漏灰现象严重。(5)料斗不易清洗。(6)顶部楼板粘灰。
9.本技术主要针对传统自动抹灰机结构复杂等相关问题,设计出了一款结构简单、体积小、便于移动运输的抹灰机。
技术实现要素:
10.针对现有技术中的问题,本技术提供一种智能化自动抹灰机,该抹灰机具有优化的产品结构、操作方便、维修成本低、抹灰效果好等特点,其抹灰过程中压实力足,能够有效利用抹灰过程中的材料,无需人工手动参与,自动化程度高。
11.本技术首先提供一种智能化自动抹灰机,主要有三个部分组成,包括主体部分,立杆部分和灰斗部分,其中所述主体部分主要包含主体12、主体机架内部的电箱部分119、电池部分110、主动电机112,所述立杆部分包含一级立杆37与二级立杆47,同时立杆部分设置缓冲结构,所述立杆部分通过立杆连接件69与所述主体部分进行连接,所述灰斗部分包含刮刀部分,灰斗146以及刮刀臂140,所述刮刀部分由三部分组成,包括抹平刀141、刮刀架87、收光刀91。
12.进一步优选的是,所述主体部分包括底盘1,底盘1上设置有推杆电机76,推杆电机76用以确保立杆垂直于地面。
13.进一步优选的是,所述主体部分包括装饰84、前门182。
14.进一步优选的是,所述立杆连接件69悬挂在y字托33上面。
15.进一步优选的是,所述主体部分包括液晶屏128,所述液晶屏128用于对机器工作过程中的控制,通过触摸屏的方式实现控制。
16.进一步优选的是,所述主体部分包括刹车电机24,刹车电机24能够通过液晶屏128的控制来实现前轮的刹车,保证在作业过程中不会出现机器主体晃动的现象。
17.进一步优选的是,所述底盘1具有悬挂装置,悬挂装置由连接轴10和连接件9组成。在抹灰机作业时遇到地面不平整的状况,可以通过连接件绕连接轴的旋转来找到一个稳定的状态,保证作业的正常进行。
18.进一步优选的是,所述立杆部分通过过滑块41与滑轨50的相互配合实现竖直方向上的直线运动。
19.进一步优选的是,所述立杆部分的缓冲结构包括缓冲顶块连接座63和缓冲顶块151这两部分构成。
20.其中缓冲顶块连接座63固定在二级立杆47和一级立杆37上方。
21.其中,缓冲顶块51可以是由聚氨酯所制成,具有很好的缓冲吸振的作用,可以大大吸收物体在碰过程中所产生的能量。
22.在抹灰机工作过程中,灰斗部分在钢丝绳的带动下开始向上的运动过程,当上升接近二级立杆顶部的时候,灰斗部分的顶块106碰到缓冲顶块51停止运动。之后二级立杆开始向上竖直运动,当二级立杆达到规定高度时,接近开关收到信号将电信号传递到plc,plc发出指令电机停止转动,二级立杆停止上升,到达规定高度。之后二级立杆开始下降,当二级立杆上安装的缓冲顶块51碰撞到固定在一级立杆37上端的顶块42时,二级立杆停止下降,达到二级立杆下降最低点。
23.一级立杆是固定在主体上的,全程并不发生位移运动。
24.进一步优选的是,所述灰斗部分的上升和下降依靠侧边的滑块90与滑轨48相互配合实现竖直方向上的直线运动。
25.进一步优选的是,刮刀部分的抹平刀141,对墙面进行第一部分的预处理,进行初步的抹平处理。
26.进一步优选的是,所述刮刀架87,用于对抹平刀141、收光刀91进行连接,对刮刀起到连接支撑的作用,同时实现与刮刀臂140的连接作用。
27.进一步优选的是,收光刀91用于实现对抹平刀处理完成后的墙面进行二次作业,实现最终的收光处理,以达到国家规定的技术要求。
28.进一步优选的是,所述灰斗146用于对灰料进行储存收集,避免灰料对环境的污染,实现生态作业的愿景。
29.进一步优选的是,所述灰斗146具有顶块106,灰斗部分在钢丝绳的带动下开始向上的运动过程,当上升接近二级立杆顶部的时候,顶块106碰到缓冲顶块51停止运动。
30.本技术的智能化自动抹灰机整机采用将主动电机112内置的方式实现动力的输出供给。这不同于已知的现有抹灰机将主动电机安装在立杆背部的实现作业的过程。本技术通过电机的内置大大减少了电机的损耗,同时在清洗过程中,电机的内置可以大大提高安全系数,保证安全施工,由于立杆是需要拆卸,减轻了立杆整体的搬运重量。
31.本技术的智能化自动抹灰机在确定垂直度的方向上采用了一端固定,一端自由的找平方式。其工作原理就是在立杆与地面不是垂直的情况下,通过安装在底盘1上的推杆电机76对立杆进行一个前后方向上的进给运动,使立杆可以与地面保持垂直的状态,同时上方的立杆连接件69可以在y字托33内部进行旋转。这样可以保证推杆电机76在下方做推进运动时,立杆的位置可以保持竖直的状态。这种设置方式明显优于已知的将固定段在下方、推杆电机在调整在上方的方式。
32.本技术的智能化自动抹灰机的有益效果包括:
33.1、该抹灰机结构简单、体积小、便于移动运输。
34.2、该抹灰机具有优化的产品结构、操作方便、维修成本低、抹灰效果好等特点,其抹灰过程中压实力足,能够有效利用抹灰过程中的材料,无需人工手动参与,自动化程度高。
35.3、该抹灰机通过电机的内置大大减少了电机的损耗,同时在清洗过程中,电机的内置可以大大提高安全系数,保证安全施工,由于立杆是需要拆卸,减轻了立杆整体的搬运重量。
36.4、该抹灰机在抹灰作业时具有更高的平整度和垂直度,其误差范围小于1.5mm。
37.5、该抹灰机可以长时间连续工作,大大提高工作效率,减少工期时长。
38.6、该抹灰机的速度可以根据工况的不同做出相应调整,以满足不同工地工况的需求。
39.7、该抹灰机采用一端固定一端自由的连接方式,在出入门口的时候不需拆卸,大大节约了工作时间,提高了工作效率。
40.8、该抹灰机的抹灰过程先有预处理的抹平,再进行二次的收光,完全避免空鼓现象的产生。
附图说明
41.本技术的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
42.图1是已知的现有抹灰机的结构示意图。
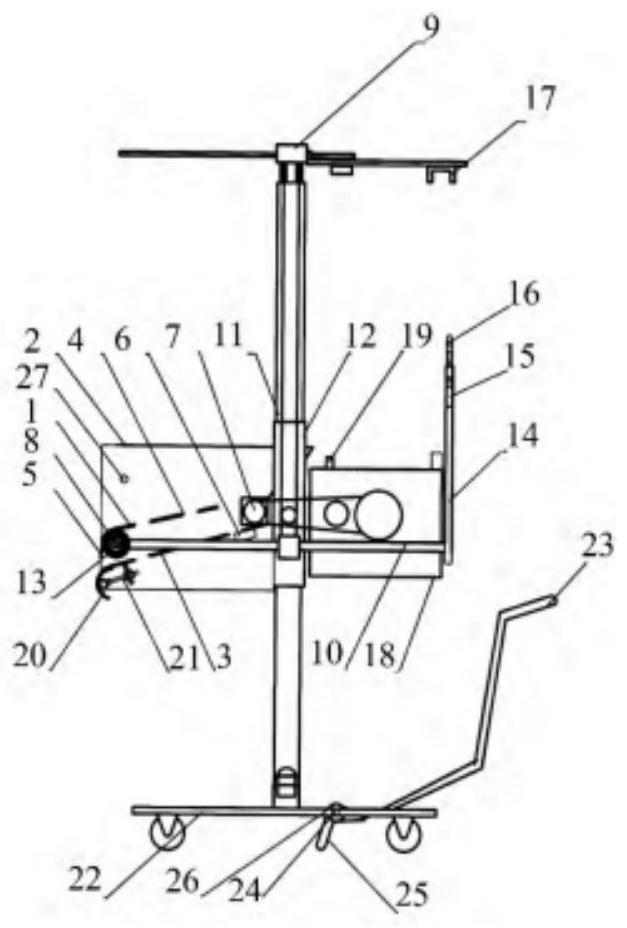
43.图2是本技术的智能化自动抹灰机整体结构示意图。
44.图3是本技术的智能化自动抹灰机的灰斗部分结构示意图。
45.图4是本技术的智能化自动抹灰机的主体部分(含外壳)结构示意图。
46.图5是本技术的智能化自动抹灰机的主体部分(不含外壳)结构示意图。
47.其中,1、底盘;5、万向轮;8、轮板;9、连接件;10、连接轴;12、主体;18、前门;22、装饰;24、刹车电机;33、y字托;37、一级立杆;41、滑块;42、顶块;45、v型滑轮;47、二级立杆;48、15滑轨;49、滑轮;50、滑轨;51、缓冲顶块;59、35u型轮;63、左缓冲顶块连接座;64、右缓冲顶块连接座;69、立杆连接件;76、推杆电机;77、后轮连接件螺母;84、装饰;87、刮刀架;90、15滑块;91、收光刀;106、顶块;110、电池部分;112、主动电机;119、电箱部分;128、液晶屏;137、装饰条;140、刮刀臂;141、抹平刀;146、灰斗;182、前门。
具体实施方式
48.应该指出,以下详细说明都是示例性的,旨在对本技术提供进一步的说明,所使用的术语仅是为了描述具体实施方式,而非意图限制基于本技术的示例性实施方式。
49.实施例1,一种智能化自动抹灰机,主要有三个部分组成,包括主体部分,立杆部分和灰斗部分,如图2-5所示。
50.其中主体部分主要包含主体12(即机器的主体机架),装饰84(22),前门18(机器的前门,位于主体的前端)以及主体机架内部的电箱部分119,电池部分110和底盘部分1(机器主体的底板)。
51.装饰84(22)是主体的装饰部分,位于主体的两侧。
52.其中立杆连接件69位于机器主体与立杆之间,作为主体部分与立杆部分的连接装置,悬挂在y字托33(位于主体的上方,用于支撑立杆连接件)上面。
53.液晶屏128用于对机器工作过程中的控制,通过触摸屏的方式实现控制。
54.主体12的下部具有轮板8和万向轮5,轮板8为固定车轮的支撑结构。
55.刹车电机24安装在底板上,位于底盘的两侧,被装饰所包覆。刹车电机24可以通过液晶屏128的控制来实现前轮的刹车,保证在作业过程中不会出现机器主体晃动的现象。
56.同时底盘还具有悬挂装置,即连接轴10和连接件9组成,连接件9位于底盘后边,两个后轮之间的连接部分,连接轴10是连接部分上的轴,用于与底盘连接。
57.底盘下方居中位置具有后轮连接件螺母77,与连接件轴10配合。
58.在抹灰机进行作业时遇到地面不平整的状况时可以通过连接件绕连接轴的旋转来找到一个稳定的状态,保证作业的正常进行。
59.立杆部分包含一级立杆37与二级立杆47及相关零件所构成。一级立杆37是机器的一级立杆,安装在主体的正后方通过立杆连接件固定在主体上。二级立杆47是机器的二级立杆,安装在一级立杆上,通过滑块滑轨之间的配合关系进行固定。
60.其中立杆部分的工作原理是通过滑块41与滑轨50的相互配合实现竖直方向上的直线运动。滑块41安装在一级立杆和二级立杆上方,一级立杆上安装6个滑块,二级立杆上安装2个滑块。顶块42安装在一级立杆和二级立杆上,分别位于一级立杆顶部中间位置和二级立杆顶部两端(二级立杆上有两个顶块42)。一级立杆37背部接近上端面的位置安装有v型滑轮45。
61.位于二级立杆两侧边具有15滑轨48,二级立杆上端部中间的位置安装有滑轮49,其关于中间对称分布。
62.滑轨50安装在一级立杆37和二级立杆47上,一级立杆37安装一根,位于中间,二级立杆47安装两根,位于左右两边。
63.同时立杆部分还设置有缓冲装置,缓冲装置包括缓冲顶块连接座和缓冲顶块51这两部分构成。
64.其中缓冲顶块连接座固定在二级立杆47和一级立杆37上方。左缓冲顶块连接座63位于二级立杆顶端滑轮两侧;右缓冲顶块连接座64位于二级立杆顶端滑轮两侧。
65.缓冲顶块51位于二级立杆上端,面向一级立杆一侧安装一个,位于中间,背向一级立杆安装两个,位于两侧。
66.缓冲顶块51是由聚氨酯所制成,具有很好的缓冲吸振的作用,可以大大吸收物体在碰过程中所产生的能量。
67.在工作过程中,灰斗部分在钢丝绳的带动下开始向上的运动过程,当上升接近二级立杆顶部的时候,顶块106碰到缓冲顶块51停止运动。之后二级立杆开始向上竖直运动,当二级立杆达到规定高度时,接近开关收到信号将电信号传递到plc,plc发出指令电机停止转动,二级立杆停止上升,到达规定高度。之后二级立杆开始下降,当二级立杆上安装的缓冲顶块51碰撞到顶块42时,二级立杆停止下降,达到二级立杆下降最低点。
68.其中灰斗部分的上升依靠侧边的滑块90与滑轨48相互配合实现竖直方向上的直线运动。
69.灰斗部分包含刮刀部分,灰斗以及刮刀臂140。
70.其中刮刀部分由三部分组成,包括抹平刀141(即灰斗部分上刀片),对墙面进行第一部分的预处理,进行初步的抹平处理。刮刀架87,用于对两个刮刀进行连接,对刮刀起到连接支撑的作用,同时实现与刮刀臂140的连接作用。收光刀91(即灰斗部分下刀片)用于实现对抹平刀处理完成后的墙面进行二次作业,实现最终的收光处理,以达到国家规定的技术要求。
71.本技术的抹灰机抹灰过程中,先有抹平刀进行第一次预处理的初步抹平,再由收光刀进行第二次的收光处理,整体处理之后完全没有空鼓现象的出现。
72.灰斗部分刮刀臂内侧具有15滑块90。
73.灰斗146用于对灰料进行储存收集,避免灰料对环境的污染,实现生态作业的愿景。灰斗部分还具有顶块106,灰斗部分在钢丝绳的带动下开始向上的运动过程,当上升接近二级立杆顶部的时候,顶块106碰到缓冲顶块51停止运动。
74.根据《一般抹灰工程施工工艺标准》规定,抹灰质量应达到以下标准:
75.(1)普通抹灰应保证墙面光滑无空鼓,要有清晰的分格缝。
76.(2)高级抹灰墙面要求相对严格,不仅要求光滑无空鼓,还要没有抹灰纹理,分格缝和灰线清晰、美观。
77.抹灰质量误差如表1.1所示。
78.表1.1抹灰质量误差
[0079][0080]
使用本实施例的智能自动抹灰机,使用石膏砂浆进行作业,机器的运行速度可以达到15cm/s,作业的幅宽可以达到120cm,每分钟的作业面积可以达到10.8m2,其立面垂直度、表面垂直度均可达到1.5mm的误差范围,并且有效施工面积达98%以上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1