一种大面积混凝土浇筑高精度平整度找平方法与流程
1.本技术涉及混凝土施工技术领域,尤其是涉及一种大面积混凝土浇筑高精度平整度找平方法。
背景技术:
2.混凝土浇筑指的是将混凝土浇筑入模直至塑化的过程。
3.在使用混凝土浇筑得到室内地面后,需要及时对尚未凝固的混凝土面进行找平以在凝固后得到平整的地面,整个混凝土砂浆找平过程包括基础找平以及后续表面细部处理,包括水泥砂光、压光等工序,通常是直接通过人工对表面进行多次处理,从而得到平整度精度更高的混凝土地面。
4.但对大面积混凝土找平时,人工处理的效率会比较低。
技术实现要素:
5.为了提升找平效率,本技术提供一种大面积混凝土浇筑高精度平整度找平方法。
6.本技术的上述目的是通过以下技术方案得以实现的:一种大面积混凝土浇筑高精度平整度找平方法,包括,步骤一,于房屋墙体内壁依次标出统一高度的平整标线;步骤二,清理地面灰尘、油污和破损地皮;步骤三,于地面上均匀间隔做灰饼,使灰饼顶部平齐于平整标线;步骤四,洒水湿润地面并浇筑混凝土砂浆,再通过摊铺抹平装置对混凝土砂浆进行摊平,并通过摊铺抹平装置对混凝土的上端面同步进行第一抹平和第二次抹平,使得抹平的混凝土砂浆上端面平齐于平整标线。
7.通过采用上述技术方案,当使用该平整度找平方法对混凝土进行找平时,先在墙壁上标出水平高度完全相同的平整标线,随后将地面上可能会影响混凝土附着力度的杂质完全清除掉,在地面上间隔布置灰饼,并将地面湿润,随后将混凝土倒于地面,通过摊铺抹平装置先将混凝土摊平至接近平整标线的高度,随后连续进行两次抹平,使得混凝土砂浆的的上端面平齐于平整标线和灰饼上端面。该方案使得大面积混凝土施工过程中找平效率更高。
8.优选的,所述摊铺抹平装置包括移动支架、设置于所述移动支架一端的摊平组件以及设置于所述摊平组件远离所述移动支架一侧端的抹平组件,所述移动支架的下端转动设置有行走滚轮,所述摊平组件包括摊平支架、水平转动设置于所述摊平支架两端的两摊开拨板、水平设置于所述摊开拨板远离所述移动支架一侧的摊平支板以及水平转动连接于所述摊平支架远离所述移动支架一侧的压平辊,所述抹平组件包括呈水平布置抹平支架以及水平滑移设置于所述抹平支架下端的抹平长板,所述抹平长板的长度方向垂直于自身移动方向。
9.通过采用上述技术方案,当使用摊铺抹平装置时,在地面上倒下混凝土砂浆,随后行走滚轮抵接在地面上滚动,使得移动支架在地面上水平移动,移动的过程中,两块摊平支板转动,从而将混凝土铺开,随后摊平支板刮过混凝土表面,使得混凝土表面平整度更高,
压平辊抵接混凝土表面滚过,从而将混凝土表面进一步压平,抹平长板在抹平支架下端水平移动,移动的过程中将混凝土表面抹平。该方案通过摊铺抹平装置将倒入的混凝土砂浆直接抹平至最终状态,使得不需要人工进行多次抹平,更加方便,进而提升了找平效率。
10.优选的,所述抹平支架下端沿长度方向水平滑移设置有连接架,所述连接架下端转动连接有摆动架,所述抹平长板位于所述摆动架下侧,所述摆动架的转动轴线平行于所述抹平支架长度方向,所述连接架下端水平布置有驱动电机,所述驱动电机的输出轴同轴设置有驱动轮,所述摆动架侧端转动设置驱动所述摆动架由竖直状向远离移动支架一侧摆动的摆动杆,所述摆动杆远离所述摆动架的一端转动连接于所述驱动轮轴心一侧。
11.通过采用上述技术方案,通过驱动电机带动摆动杆转动,摆动杆的另一端带动摆动架沿垂直于连接架的滑移方向进行摆动,进而带动抹平长板沿垂直于连接架的移动方向进行往复移动,从而提升抹平效率,同时摆动杆转动连接于驱动轮的转动轴心一侧,从而使得摆动杆带动摆动架转动时摆动架最下端的高度将会发生变化,且高度的变化为逐渐变化,从而使得抹平长板在往复移动的同时高度将会出现变化,其中较低的位置位于靠近移动支架一侧,较高的位置位于远离移动支架一侧,使得抹平长板往复移动时可以更好的抹平混凝土砂浆,减少混凝土上表面的抹平痕迹,从而提升抹平质量,减小人工补齐抹平的几率。
12.优选的,所述摆动架下端转动连接有两摆动臂,两所述摆动臂向相反的两侧倾斜延伸,所述抹平长板的两端转动连接于两所述摆动臂远离所述摆动架的一端,所述抹平长板在重力作用下可形变,一所述摆动臂远离所述抹平长板的一侧端沿长度方向设置有拉簧,所述拉簧靠近摆动架的一端连接有钢丝,所述摆动臂靠近摆动架的一端转动连接有定滑轮,所述钢丝绕于所述定滑轮并固定于所述抹平长板上端面中部。
13.通过采用上述技术方案,两摆动臂均转动连接在摆动架下端,使得摆动架在往复摆动的过程中,两摆动臂可保持抹平长板持续呈水平状态,同时通过拉簧拉动钢丝,使得钢丝吊于抹平长板上端面中部,使得整个抹平长板在接近混凝土表面时形态将会发生变化,即抹平长板的中部在重力的作用下下凹,从而增加抹平长板施加至混凝土表面的压力,进而提升抹平效果,同时通过钢丝拉紧抹平长板,使得抹平长板形变的程度可控。
14.优选的,所述抹平支架下端平行转动设置有驱动螺杆,所述驱动螺杆上螺纹套设有移动块,所述驱动螺杆一侧平行设置有导向长杆,所述连接架的中部开设有供所述导向长杆穿入滑移的导向孔,所述导向孔直径大于所述导向长杆直径,所述导向长杆上侧平行设置有增阻长杆,所述增阻长杆沿长度方向滑移连接有增阻滑块,所述增阻滑块的下端开设有供所述连接架顶部插入并摆动的摆动槽,所述增阻滑块和所述增阻长杆之间的摩擦力大于所述抹平长板和混凝土砂浆表面的摩擦力,所述连接架侧端转动连接于所述移动块侧端。
15.通过采用上述技术方案,当抹平长板在往复摆动的过程中,抹平长板还会随着连接架沿着抹平支架的长度方向进行移动,而抹平长板的下端面将会和混凝土表面产生一定的摩擦力,使得抹平长板在移动的过程中一旦出现倾斜,将会造成已经被抹平的混凝土表面被破坏,该方案中驱动螺杆带动移动块沿抹平支架长度方向进行移动,在移动的过程中带动连接架进行移动,而连接架一旦开始移动,连接架的上端将会抵接增阻滑块下端摆动槽的侧壁,使得连接架想要移动就需要带动增阻滑块移动,增阻滑块和增阻长杆之间的摩
擦力大于抹平长板和混凝土之间的摩擦力,使得连接架的顶部将会向远离自身移动的一侧微微倾斜,从而使得最下端的抹平长板出现轻微的倾斜,此时抹平长板靠近移动方向的一侧端起翘,进而减小混凝土抹平过程中产生抹痕的几率,使得抹平质量得到提升。
16.优选的,所述抹平长板垂直于所述抹平支架长度方向的两侧端向上弯卷。
17.通过采用上述技术方案,将抹平长板垂直于抹平支架长度方向的两侧端向上弯卷,从而使得抹平长板移动过混凝土上端面时不会因为一侧端棱边对混凝土表面过大的挤压力造成混凝土被刮出毛刺,从而有效提升抹平质量。
18.优选的,所述摊开拨板包括水平转动连接于所述摊平支架一端的轴体以及转动套设于所述轴体周侧端的板体,所述轴体的转动轴线呈竖直状态,所述轴体位于所述板体靠上部,所述轴体的转轴周侧端设置有支撑块,所述支撑块支撑于所述板体靠近所述抹平支架一端。
19.通过采用上述技术方案,摊开拨板包括轴体以及板体,轴体水平转动连接在摊平支架一端,板体转动套设在轴体上,使得当两板体由同一平面状态转动至平行状态的过程中,支撑块支撑住板体,使得板体可将混凝土摊开,当两板体由平行状态转动至呈同一平面状态时,板体在碰触混凝土时可以轴体为转轴转动,从而减小因复位造成的混凝土回拨,进而提升混凝土的摊开效率。
20.优选的,所述摊平支架于所述摊平支板和所述压平辊之间转动设置有平行于所述压平辊的起泡辊,所述起泡辊的周侧端周向均匀布置有起泡插针,所述起泡插针指向所述起泡辊的转动轴线。
21.通过采用上述技术方案,当混凝土在经过初步的摊平后,混凝土内部将会残存有一些气泡,一方面这些气泡容易造成抹平后后的混凝土表面出现不平整,另一方面容易影响混凝土凝固后的强度,该方案中通过转动的起泡辊将起泡插针插入混凝土内,从而将气泡释放,进而提升混凝土的抹平质量。
22.优选的,所述抹平支架的两端于所述抹平长板远离所述摊平支架一侧设置有抹痕组件,所述抹痕组件包括抹痕支架、转动设置于所述抹痕支架远离所述抹平支架一端的抹痕轴以及周向均匀排布于所述抹痕轴周侧端的抹痕叶片,所述抹痕轴的转动轴线呈竖直状,所述抹痕叶片的最低处平齐于所述抹平长板下端面,所述抹痕叶片两侧端以及远离所述抹痕轴的一端向上弯卷,所述抹痕叶片转动方向的一侧端高于另一侧端。
23.通过采用上述技术方案,当摊铺抹平装置将一整条混凝土摊铺抹平后,需要在抹平后的混凝土一侧继续进行摊铺抹平,同时需要将两处混凝土的衔接处进行抹平,该方案中通过抹痕轴带动周侧端的抹痕叶片旋转,旋转的抹痕叶片将会将两处混凝土的衔接处进行抹平,抹痕叶片的两侧端以及远离抹痕轴的一端向上弯卷,以减少抹平过程中产生新痕迹的几率。
24.优选的,所述抹痕支架转动连接于所述抹平支架,所述抹平支架于所述抹痕支架一侧转动设置有调整气缸,所述调整气缸的活塞杆转动连接于所述抹痕支架侧端。
25.通过采用上述技术方案,通过调整气缸调动抹痕支架进行转动,从而调整抹平叶片的位置,一方面可以更好抹平两处混凝土的衔接痕迹,另一方面该摊铺抹平装置在对靠近墙边的混凝土进行抹平时,接触墙壁部分的混凝土将会无法抹平,而通过调整气缸可使得抹痕支架不完全展开,进而对靠近墙壁的混凝土进行抹平,更加方便。
26.综上所述,本技术的有益技术效果为:1.当使用摊铺抹平装置时,在地面上倒下混凝土砂浆,随后行走滚轮抵接在地面上滚动,使得移动支架在地面上水平移动,移动的过程中,两块摊平支板转动,从而将混凝土铺开,随后摊平支板刮过混凝土表面,使得混凝土表面平整度更高,压平辊抵接混凝土表面滚过,从而将混凝土表面进一步压平,抹平长板在抹平支架下端水平移动,移动的过程中将混凝土表面抹平,通过摊铺抹平装置将倒入的混凝土砂浆直接抹平至最终状态,使得不需要人工进行多次抹平,更加方便,进而提升了找平效率;2.通过驱动电机带动摆动杆转动,摆动杆的另一端带动摆动架沿垂直于连接架的滑移方向进行摆动,进而带动抹平长板沿垂直于连接架的移动方向进行往复移动,从而提升抹平效率,同时摆动杆转动连接于驱动轮的转动轴心一侧,从而使得摆动杆带动摆动架转动时摆动架最下端的高度将会发生变化,且高度的变化为逐渐变化,从而使得抹平长板在往复移动的同时高度将会出现变化,其中较低的位置位于靠近移动支架一侧,较高的位置位于远离移动支架一侧,使得抹平长板往复移动时可以更好的抹平混凝土砂浆,减少混凝土上表面的抹平痕迹,从而提升抹平质量,减小人工补齐抹平的几率;3.驱动螺杆带动移动块沿抹平支架长度方向进行移动,在移动的过程中带动连接架进行移动,而连接架一旦开始移动,连接架的上端将会抵接增阻滑块下端摆动槽的侧壁,使得连接架想要移动就需要带动增阻滑块移动,增阻滑块和增阻长杆之间的摩擦力大于抹平长板和混凝土之间的摩擦力,使得连接架的顶部将会向远离自身移动的一侧微微倾斜,从而使得最下端的抹平长板出现轻微的倾斜,此时抹平长板靠近移动方向的一侧端起翘,进而减小混凝土抹平过程中产生抹痕的几率,使得抹平质量得到提升。
附图说明
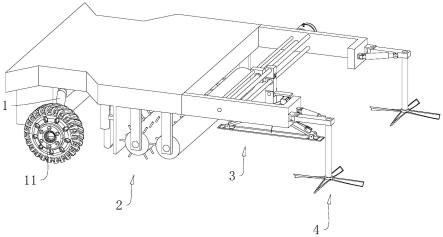
27.图1为本技术中摊铺抹平装置的结构示意图;图2为本技术中摊铺抹平装置另一视角的结构示意图;图3为图2的a处放大图;图4为抹平组件和抹痕组件的结构示意图;图5为图4的b处放大图;图6为图4的c处放大图。
28.图中:1、移动支架;11、行走滚轮;2、摊平组件;21、摊平支架;22、摊开拨板;221、轴体;222、板体;223、支撑块;23、摊平支板;24、压平辊;25、起泡辊;251、起泡插针;3、抹平组件;31、抹平支架;311、驱动螺杆;3111、动力电机;312、导向柱;313、移动块;314、导向长杆;315、增阻长杆;316、增阻滑块;3161、摆动槽;32、抹平长板;33、连接架;331、导向孔;332、摆动拨块;34、摆动架;341、驱动电机;342、驱动轮;343、摆动杆;35、摆动臂;351、拉簧;352、钢丝;353、定滑轮;4、抹痕组件;41、抹痕支架;42、抹痕轴;43、抹痕叶片;44、调整气缸。
具体实施方式
29.以下结合附图1-6对本技术作进一步详细说明。
30.参见图1,一种大面积混凝土浇筑高精度平整度找平方法,包括,步骤一,于墙壁标出统一高度的平整标线;步骤二,清理地面灰尘、油污和破损地皮;步骤三,于地面上均匀间
隔做灰饼;步骤四,洒水湿润地面并浇筑混凝土砂浆,再通过摊铺抹平装置对混凝土砂浆进行摊平抹平,使得抹平的混凝土砂浆上端面平齐于平整标线参见图1,摊铺抹平装置包括移动支架1、设置于移动支架1一端的摊平组件2、设置于摊平组件2远离移动支架1一侧端的抹平组件3以及设置于抹平组件3两端部的抹痕组件4。
31.移动支架1的两端部通过轴承转动连接有两行走滚轮11,使得移动支架1可通过两行走滚轮11带动摊平组件2、抹平组件3和抹痕组件4一同移动。
32.参见图2和图3,摊平组件2包括摊平支架21、水平转动设置于摊平支架21两端的两摊开拨板22、水平设置于摊开拨板22远离移动支架1一侧的摊平支板23以及水平转动连接于摊平支架21远离移动支架1一侧的压平辊24。摊平支架21通过螺栓水平固定于移动支架1上端,摊开拨板22包括通过转轴水平转动连接于摊平支架21下端的轴体221以及转动套设于轴体221上的板体222,轴体221的转动轴线呈竖直状态,轴体221位于板体222靠上部,轴体221的转轴周侧端焊接有支撑块223,支撑块223支撑于板体222靠近抹平支架31一端,使得两块板体222由同一平面状态转动至平行状态过程中,支撑块223支撑板体222呈竖直状态,当两块板体222由平行状态转动至呈同一平面状态时,板体222可以轴体221为轴向远离抹平组件3一侧转动。
33.摊平支板23竖直焊接在摊平支架21下端面,摊平支板23的下侧端面平齐于板体222的下侧端面,压平辊24的两端通过转轴转动连接在摊平支架21下端,压平辊24平行于摊平支板23且下侧平齐于摊平支板23下侧端面。
34.摊平支架21下端面于摊平支板23和压平辊24之间通过转轴转动连接有平行于压平辊24的起泡辊25,起泡辊25的周侧端周向均匀焊接有起泡插针251,起泡插针251指向起泡辊25的转动轴线。
35.参见图4和图5,抹平组件3包括呈水平布置抹平支架31以及沿抹平支架31长度方向滑移的抹平长板32,抹平支架31焊接在摊平支架21的一侧端且位于压平辊24上侧。
36.抹平支架31上通过轴承转动连接有驱动螺杆311,驱动螺杆311的长度方向平行于抹平支架31的长度方向,抹平支架31一端通过螺栓固定有动力电机3111,动力电机3111的输出轴同轴连接于驱动螺杆311的转轴,抹平支架31于驱动螺杆311一侧通过螺栓固定有两根平行于驱动螺杆311的导向柱312,驱动螺杆311周侧端螺纹套设有一移动块313,两导向柱312穿过移动块313,使得动力电机3111工作时,移动块313在导向柱312的导向下将会沿着驱动螺杆311的长度方向往复移动。
37.抹平支架31于驱动螺杆311远离导向柱312的一侧通过螺栓平行固定有一导向长杆314,导向长杆314上滑移套设有一连接架33,连接架33的中部开设有供导向长杆314穿入的导向孔331,导向孔331的直径略大于导向长杆314的直径,连接架33靠近驱动螺杆311的一侧端通过转轴转动连接在移动块313的侧端,抹平支架31于导向长杆314的上侧通过螺栓平行连接有一增阻长杆315,增阻长杆315上滑移套设有一增阻滑块316,增阻滑块316的下侧端开设有摆动槽3161,连接架33的顶部焊接有一插入摆动槽3161内的摆动拨块332,摆动槽3161的宽度大于摆动拨块332的宽度。
38.参见图4和图6,连接架33的下端通过转轴转动连接有摆动架34,摆动架34的转动轴线平行于导向长杆314的长度方向,连接架33远离驱动螺杆311的一侧端通过螺栓水平固
定有一驱动电机341,驱动电机341的输出轴上同轴焊接有一驱动轮342,驱动轮342于自身轴心一侧通过转轴转动连接有一摆动杆343,摆动杆343远离驱动轮342的一端通过转轴转动连接于摆动架34远离连接的一端,使得驱动电机341工作时,驱动轮342带动摆动杆343转动,摆动杆343的另一端带动摆动架34沿垂直于连接架33的滑移方向进行摆动,摆动杆343带动摆动架34转动至最远离驱动轮342的位置时,摆动架34呈竖直状态。
39.摆动架34下端通过转轴转动连接有两摆动臂35,两摆动臂35向相反的两侧倾斜延伸,两摆动臂35远离摆动架34的一端通过转轴分别转动连接在抹平长板32上端面靠近两端头的位置,抹平长板32可形变,在重力作用下中部下凹,抹平长板32垂直于抹平支架31长度方向的两侧端向上弯卷。
40.一摆动臂35远离抹平长板32的一侧端沿长度方向通过螺栓固定有拉簧351,拉簧351靠近摆动架34的一端系设有钢丝352,摆动臂35靠近摆动架34的一端通过转轴转动连接有定滑轮353,钢丝352绕于定滑轮353并通过螺栓固定于抹平长板32上端面中部。
41.增阻滑块316和增阻长杆315之间的摩擦力大于抹平长板32下端面和混凝土砂浆表面的摩擦力,使得移动块313带动连接架33移动时,增阻滑块316对连接架33进行阻挡,使得连接架33的下端向自身移动方向倾斜,从而使得抹平长板32向自身移动方向起翘。
42.参见图4,抹痕组件4包括通过转轴转动连接于抹平支架31远离摊平支架21一侧端的抹痕支架41、通过轴承竖直转动连接于抹痕支架41远离抹平支架31一端的抹痕轴42以及一体周向均匀排布于抹痕轴42周侧端的抹痕叶片43,抹痕轴42以及抹痕支架41的转动轴线呈竖直状,抹痕叶片43的最低处平齐于抹平长板32下端面,抹痕叶片43两侧端以及远离抹痕轴42的一端向上弯卷,抹痕叶片43转动方向的一侧端高于另一侧端,抹平支架31于抹痕支架41一侧通过转轴转动连接有调整气缸44,调整气缸44的活塞杆通过转轴转动连接于抹痕支架41侧端。通过调整气缸44带动抹痕支架41水平转动。
43.本实施例的实施原理为:当通过该大面积混凝土浇筑高精度平整度找平方法对混凝土进行施工时,步骤一,于房屋墙体内壁依次标出统一高度的平整标线;步骤二,清理地面灰尘、油污和破损地皮;步骤三,于地面上均匀间隔做灰饼,使灰饼顶部平齐于平整标线;步骤四,洒水湿润地面并浇筑混凝土砂浆,再通过摊铺抹平装置对混凝土砂浆进行摊平抹平,当使用摊铺抹平装置时,在地面上倒下混凝土砂浆,随后行走滚轮11抵接在地面上滚动,使得移动支架1在地面上水平移动,移动的过程中,两块摊平支板23在气缸的带动下由同一平面状态转动至平行状态,此时支撑块223支撑住板体222,使得板体222可将混凝土摊开,当两板体222由平行状态转动至呈同一平面状态时,板体222在碰触混凝土时可以轴体221为转轴转动,从而减小因复位造成的混凝土回拨,从而将混凝土铺开,随后摊平支板23刮过混凝土表面,使得混凝土表面平整度更高,起泡辊25转动并使得周侧端的起泡插针251插入混凝土内,从而将混凝土内部的气泡释放,而压平辊24将会抵接混凝土表面滚过,从而将混凝土表面进一步压平,驱动螺杆311带动移动块313沿抹平支架31长度方向进行移动,在移动的过程中带动连接架33进行移动,而连接架33一旦开始移动,连接架33上端的摆动拨块332将会抵接增阻滑块316下端摆动槽3161的侧壁,使得连接架33想要移动就需要带动增阻滑块316移动,增阻滑块316和增阻长杆315之间的摩擦力大于抹平长板32和混凝土之间的摩擦力,使得连接架33的顶部将会向远离自身移动的一侧微微倾斜,此时抹平长板32靠近移动方向的一侧端起
翘,抹平长板32在此状态下移动并将混凝土表面抹平,同时,驱动电机341带动摆动杆343转动,摆动杆343的另一端带动摆动架34沿垂直于连接架33的滑移方向进行摆动,进而带动抹平长板32沿垂直于连接架33的移动方向进行往复移动,摆动杆343转动连接于驱动轮342的端部移动至最靠近移动支架1时,抹平长板32位于最低处,摆动杆343转动连接于驱动轮342的端部移动至最远离移动支架1时,抹平长板32位于最高点,抹平长板32由最高处移动至最低处的过程中接触混凝土表面并进行抹平,两摆动臂35均转动连接在摆动架34下端,使得摆动架34在往复摆动的过程中,两摆动臂35可保持抹平长板32持续呈水平状态,同时通过拉簧351拉动钢丝352,使得钢丝352吊于抹平长板32上端面中部,使得整个抹平长板32在接近混凝土表面时形态将会发生变化,即抹平长板32的中部在重力的作用下下凹,从而增加抹平长板32施加至混凝土表面的压力,进而提升抹平效果,使得抹平的混凝土砂浆上端面平齐于平整标线。
44.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1