自提升可悬停式施工操作平台及施工方法与流程
1.本发明涉及一种自提升可悬停式施工操作平台及施工方法。
背景技术:
2.在超高层电梯井道二结构施工时,需要在电梯井道内搭设施工操作平台,目前在实际施工中已经出现了较多的各类施工操作平台,主要有纯钢管扣件式施工操作平台与型钢焊接整体式施工操作平台两大类,基本上解决了电梯井道内施工人员的作业面的问题,但在实际使用中这两类操作平台仍有一些问题需要进一步改进。比如纯钢管扣件式施工操作平台施工效率低,需要使用大量脚手架钢管,脚手架钢管周转较长,不利于节约施工成本,且脚手架高度过高存在安全隐患。而型钢焊接整体式施工操作平台用钢量大,且需要利用塔吊进行爬升作业,占用塔吊使用时间,同时在吊装过程中有可能出现较为重大的安全隐患。
技术实现要素:
3.本发明的目的在于提供一种自提升可悬停式施工操作平台及施工方法。
4.为解决上述问题,本发明提供一种自提升可悬停式施工操作平台,包括:下操作平台、上操作平台、动力系统,其中,
5.下操作平台,包括:下底梁、下底梁翻转牛腿、下底梁底部钢板和下底梁封闭闸板,其中,多个下底梁翻转牛腿与所述下底梁连接,并可翻转后分别架设于井道混凝土墙体和混凝土楼板上;连接于下底梁的底部的下底梁底部钢板,所述混凝土楼板设置于混凝土梁上;所述下底梁封闭闸板,用于封闭下底梁底部钢板与所在楼层的所述混凝土楼板之间的缝隙;
6.所述上操作平台,包括:上底梁、上底梁翻转牛腿、上底梁底部钢板和上底梁封闭闸板,其中,多个上底梁翻转牛腿与所述上底梁连接,并可翻转后分别架设于井道混凝土墙体和混凝土楼板上;连接于上底梁的底部的上底梁底部钢板,所述混凝土楼板设置于混凝土梁上;所述上底梁封闭闸板,用于封闭上底梁底部钢板与所在楼层的所述混凝土楼板之间的缝隙;
7.所述动力系统,包括:设置于上操作平台的台上电动丝杆升降机、设置于下操作平台的台下电动丝杆升降机、同步控制系统和无线遥控装置,其中,上电动丝杆升降机的底座与上底梁连接;下电动丝杆升降机的底座与下底梁连接;所述上底梁上开孔,上电动丝杆升降机的丝杆从上底梁上的开孔中穿过;所述下底梁上开孔,下电动丝杆升降机的丝杆从下底梁上的开孔中穿过;上电动丝杆升降机的丝杆的下端与下电动丝杆升降机的丝杆上端连接;上操作平台和下操作平台上分别设置有一个同步控制系统,上操作平台的同步控制系统与上电动丝杆升降机电连接,下操作平台的同步控制系统与下电动丝杆升降机电连接;所述无线遥控装置分别与上操作平台的同步控制系统和下操作平台的同步控制系统电连接;所述上电动丝杆升降机和下电动丝杆升降机具有自锁功能。
8.进一步的,上述自提升可悬停式施工操作平台中,上底梁采用4根箱梁焊接成正方形。
9.进一步的,上述自提升可悬停式施工操作平台中,下底梁采用4根箱梁焊接成正方形。
10.进一步的,上述自提升可悬停式施工操作平台中,对应楼层的井道混凝土墙体和混凝土楼板上设置有上施工操作平台或下施工操作平台的牛腿搁置孔。
11.进一步的,上述自提升可悬停式施工操作平台中,上电动丝杆升降机的丝杆下端固定有上法兰盘,下电动丝杆升降机的丝杆上端固定有下法兰盘,上法兰盘和下法兰盘通过高强螺栓连接。
12.进一步的,上述自提升可悬停式施工操作平台中,上电动丝杆升降机的底座与上底梁通过高强螺栓连接。
13.进一步的,上述自提升可悬停式施工操作平台中,下电动丝杆升降机的底座与下底梁通过高强螺栓连接。
14.根据本发明的另一方面,还提供一种自提升可悬停式施工操作平台的施工方法,采用上述任一实施例的自提升可悬停式施工操作平台,所述方法包括:
15.电梯井道墙体施工时,在对应楼层的井道混凝土墙体与楼板上预留上施工操作平台和下施工操作平台的牛腿搁置孔;
16.通过吊装将下操作平台通过下底梁翻转牛腿搁置在电梯井道的下楼层的墙体和楼板的牛腿搁置孔内,然后将台下电动丝杆升降机通过高强螺栓固定在下底梁上,并将下电动丝杆升降机的丝杆收回至最底部;
17.将上操作平台吊装到下操作平台相邻的上一楼层并通过上底梁翻转牛腿搁置在上一楼层的墙体和楼板的牛腿搁置孔内,然后将4台上电动丝杆升降机通过高强螺栓固定在上底梁上,并将丝杆向下伸出至下操作平台电动丝杆升降机的丝杆顶端,随后将上电动丝杆升降机的上法兰盘和下电动丝杆升降机丝杆上的法兰盘通过高强螺栓连接,并分别接入同步控制系统,将每个同步控制系统分别与无线遥控装置连接;
18.将下底梁封闭闸板和上底梁封闭闸板关闭,则自提升可悬浮式施工操作平台安装完成。
19.进一步的,上述方法中,将下底梁封闭闸板和上底梁封闭闸板关闭,则自提升可悬浮式施工操作平台安装完成之后,还包括:
20.将上操作平台通过将翻转出的上底梁翻转牛腿搁置在上楼层的井道混凝土墙体与楼板上;将下操作平台通过将翻转出的下底梁翻转牛腿搁置在下楼层的井道混凝土墙体与楼板上;
21.当需要进行施工作业时,作业人员将包括砌块、砂浆的材料放置在下操作平台上;当材料用完或作业高度超过作业人员所能施工的高度时,通过无线遥控装置控制上操作平台的上电动丝杆升降机的丝杆的伸出与收回,实现下操作平台的上下升降,通过上电动丝杆升降机的自锁功能,实现下操作平台在任意位置的悬停。
22.进一步的,上述方法中,实现下操作平台在任意位置的悬停之后,还包括:
23.当需要进行提升作业时,将下操作平台通过下底梁翻转牛腿搁置在电梯井道的下楼层的墙体和楼板的牛腿搁置孔内,将上底梁封闭闸板和翻转出的上底梁翻转牛腿收回,
然后通过无线遥控装置将上操作平台的上电动丝杆升降机向上收回,并将下操作平台的下电动丝杆升降机向上伸出,上电动丝杆升降机和下电动丝杆升降机通过同步控制系统实现丝杆的同步伸出与同步收回,且速率相同;
24.当上操作平台的上电动丝杆升降机的丝杆收回到最底部时,此时关闭上操作平台的上电动丝杆升降机,将下操作平台的下电动丝杆升降机的丝杆继续向上伸出,带动上操作平台一起向上同步运动,直到上操作平台上升到相邻上一层,并将上操作平台翻转出的上底梁翻转牛腿搁置在井道混凝土墙体和混凝土楼板上,上操作平台提升完成,然后关闭上底梁封闭闸板;
25.打开下底梁封闭闸板,通过无线遥控装置同时启动上操作平台的上电动丝杆升降机和下操作平台的下电动丝杆升降机,将上操作平台的上电动丝杆升降机的丝杆向下伸出,将下操作平台的下电动丝杆升降机的丝杆向下收回,直到下操作平台的下电动丝杆升降机的丝杆收回至最底部,此时关闭下操作平台的下电动丝杆升降机;
26.通过无线遥控装置启动上操作平台的上电动丝杆升降机使其丝杆向上收回,并带动下操作平台一起向上运动,直到下操作平台上升到相邻上一楼层,上操作平台通过翻转下底梁翻转牛腿在井道混凝土墙体和楼板上,最后关闭下底梁封闭闸板,则整个过程完成一次自提升可悬浮式施工操作平台的提升。
27.与现有技术相比,本发明包括:下操作平台、上操作平台、动力系统。本发明针对现有的超高层电梯井道二结构施工各类操作平台的不足,提供可用于超高层井道施工的自提升可悬停式施工操作平台,本施工操作平台用钢量少,成本低,通过电动丝杆升降机实现了操作平台的自爬升,同时可以使得操作平台在提升过程任意位置可悬停,无需在楼层间再搭设操作脚手,给施工带来便利。本操作平台具有施工效率高,造价低,承载大等特点,同时给施工人员提供了安全、可靠的作业平台。
附图说明
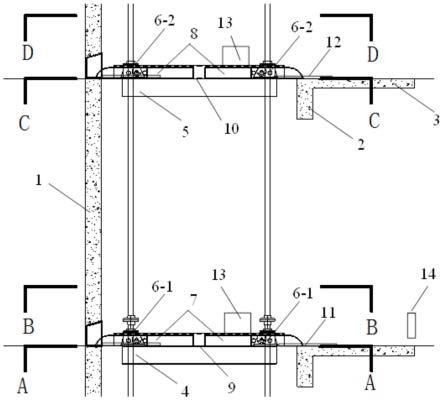
28.图1是本发明一实施例的自提升可悬停式施工操作平台的立面图;
29.图2是图1中沿a-a向的剖面图;
30.图3是图1中沿b-b向的剖面图;
31.图4是图1中沿c-c向的剖面图;
32.图5是图1中沿d-d向的剖面图;
33.图6是本发明一实施例的下操作平台通过下底梁翻转牛腿搁置在井道混凝土墙体和混凝土楼板上的示意图;
34.图7是本发明一实施例的下操作平台上升的示意图;
35.图8是本发明一实施例的下操作平台继续上升的示意图;
36.图9是本发明一实施例的将下操作平台搁置在电梯井道的下楼层的墙体和楼板的示意图;
37.图10是本发明一实施例的上操作平台的上电动丝杆升降机的丝杆收回到最底部的示意图;
38.图11是本发明一实施例的下操作平台的下电动丝杆升降机的丝杆继续向上伸出,带动上操作平台一起向上同步运动的示意图;
39.图12是本发明一实施例的将上操作平台的上电动丝杆升降机的丝杆向下伸出的示意图;
40.图13是本发明一实施例的下操作平台上升到相邻上一楼层的示意图。
41.图中标号如下:1、井道混凝土墙体;2、混凝土梁;3、混凝土楼板;4、下底梁;5、上底梁;6-1、下操作平台电动丝杆升降机;6-2、上操作平台电动丝杆升降机;7、下底梁翻转牛腿;8、上底梁翻转牛腿;9、下底梁底部钢板;10、上底梁底部钢板;11、下底梁封闭闸板;12、上底梁封闭闸板;13、同步控制系统;14、无线遥控装置。
具体实施方式
42.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
43.如图1至5所示,本发明提供一种自提升可悬停式施工操作平台,包括:下操作平台、上操作平台、动力系统,其中,
44.下操作平台,包括:下底梁4、下底梁翻转牛腿7、下底梁底部钢板9和下底梁封闭闸板11,其中,多个下底梁翻转牛腿7与所述下底梁4连接,并可翻转后分别架设于井道混凝土墙体1和混凝土楼板3上;连接于下底梁4的底部的下底梁底部钢板9,所述混凝土楼板3设置于混凝土梁2上;所述下底梁封闭闸板11,用于封闭下底梁底部钢板9与所在楼层的所述混凝土楼板3之间的缝隙;
45.所述上操作平台,包括:上底梁5、上底梁翻转牛腿8、上底梁底部钢板10和上底梁封闭闸板12,其中,多个上底梁翻转牛腿8与所述上底梁5连接,并可翻转后分别架设于井道混凝土墙体1和混凝土楼板3上;连接于上底梁5的底部的上底梁底部钢板10,所述混凝土楼板3设置于混凝土梁2上;所述上底梁封闭闸板12,用于封闭上底梁底部钢板10与所在楼层的所述混凝土楼板3之间的缝隙;
46.所述动力系统,包括:设置于上操作平台的4台上电动丝杆升降机6-2、设置于下操作平台的4台下电动丝杆升降机6-1、同步控制系统13和无线遥控装置14,其中,上电动丝杆升降机6-2的底座与上底梁4通过高强螺栓连接;下电动丝杆升降机6-1的底座与下底梁5通过高强螺栓连接;所述上底梁4上开孔,上电动丝杆升降机6-2的丝杆从上底梁4上的开孔中穿过;所述下底梁5上开孔,下电动丝杆升降机6-1的丝杆从下底梁5上的开孔中穿过;上电动丝杆升降机6-2的丝杆下端固定有上法兰盘,下电动丝杆升降机6-1的丝杆上端固定有下法兰盘,上法兰盘和下法兰盘通过高强螺栓连接;上操作平台和下操作平台上分别设置有一个同步控制系统13,上操作平台的同步控制系统13与上电动丝杆升降机6-2电连接,下操作平台的同步控制系统13与下电动丝杆升降机6-1电连接;所述无线遥控装置14分别与上操作平台的同步控制系统13和下操作平台的同步控制系统13电连接;所述上电动丝杆升降机6-2和下电动丝杆升降机6-1具有自锁功能。
47.本发明针对现有的超高层电梯井道二结构施工各类操作平台的不足,提供一种可用于超高层井道施工的自提升可悬停式施工操作平台,本施工操作平台用钢量少,成本低,通过电动丝杆升降机实现了操作平台的自爬升,同时可以使得操作平台在提升过程任意位置可悬停,无需在楼层间再搭设操作脚手,给施工带来便利。本操作平台具有施工效率高,造价低,承载大等特点,同时给施工人员提供了安全、可靠的作业平台。
48.在此,本发明提供一种可用于超高层井道施工的自提升可悬停式施工操作平台,其主要由:下操作平台、上操作平台、动力系统等组成。
49.其中,下操作平台主要由:下底梁4、下底梁翻转牛腿7、下底梁底部钢板9、下底梁封闭闸板11等组成,下底梁采用4根箱梁焊接成正方形,下底梁翻转牛腿7由双拼c型槽钢与承重销组成。
50.上操作平台主要由:上底梁5、上底梁翻转牛腿8、上底梁底部钢板10、上底梁封闭闸板12等组成,上底梁也是采用4根箱梁焊接而成。
51.动力系统主要包括:上、下操作平台上各4台上电动丝杆升降机6-2、下电动丝杆升降机6-1、同步控制系统13和无线遥控装置14等,上、下电动丝杆升降机的底座分别与上底梁4与下底梁5通过高强螺栓连接,同时需要在上底梁4与下底梁5上开孔,使得丝杆能从上底梁与下底梁穿过。上操作平台的上电动丝杆升降机6-2的丝杆下端固定有上法兰盘,下操作平台的下电动丝杆升降机6-1的丝杆上端固定有下法兰盘,将两个法兰盘通过高强螺栓连接。
52.本发明的自提升可悬停式施工操作平台一实施例中,上底梁5采用4根箱梁焊接成正方形。
53.本发明的自提升可悬停式施工操作平台一实施例中,下底梁4采用4根箱梁焊接成正方形。
54.如图1至13所示,本发明还提供一种自提升可悬停式施工操作平台的施工方法,采用上述任一实施例的自提升可悬停式施工操作平台,所述方法包括:
55.步骤s1,电梯井道墙体施工时,在对应楼层的井道混凝土墙体1与楼板3预留上施工操作平台和下施工操作平台的牛腿搁置孔;
56.在此,考虑到该施工操作平台的安装条件,可从楼层的第三层开始安装该施工操作平台;
57.步骤s2,通过吊装将下操作平台通过下底梁翻转牛腿7搁置在电梯井道的下楼层的墙体和楼板的牛腿搁置孔内,然后将4台下电动丝杆升降机通过高强螺栓固定在下底梁4上,并将下电动丝杆升降机的丝杆收回至最底部;
58.步骤s3,将上操作平台吊装到下操作平台相邻的上一楼层并通过上底梁翻转牛腿8搁置在上一楼层的墙体和楼板的牛腿搁置孔内,然后将4台上电动丝杆升降机通过高强螺栓固定在上底梁5上,并将丝杆向下伸出至下操作平台电动丝杆升降机的丝杆顶端,随后将上电动丝杆升降机的上法兰盘和下电动丝杆升降机丝杆上的法兰盘通过高强螺栓连接,并分别接入同步控制系统13,将每个同步控制系统13分别与无线遥控装置14连接;
59.步骤s4,将下底梁封闭闸板11和上底梁封闭闸板12关闭,则自提升可悬浮式施工操作平台安装完成。
60.本发明的自提升可悬停式施工操作平台的施工方法一实施例中,步骤s4,将下底梁封闭闸板11和上底梁封闭闸板12关闭,则自提升可悬浮式施工操作平台安装完成之后,还包括:
61.步骤s5,将上操作平台通过将翻转出的上底梁翻转牛腿8搁置在上楼层的井道混凝土墙体1与楼板3上;将下操作平台通过将翻转出的下底梁翻转牛腿7搁置在下楼层的井道混凝土墙体1与楼板3上;
62.步骤s6,当需要进行施工作业时,作业人员将包括砌块、砂浆的材料放置在下操作平台上;当材料用完或作业高度超过作业人员所能施工的高度时,通过无线遥控装置14控制上操作平台的上电动丝杆升降机6-2的丝杆的伸出与收回,实现下操作平台的上下升降,通过上电动丝杆升降机6-2的自锁功能,实现下操作平台在任意位置的悬停。
63.在此,如图6-8所示,上、下操作平台通过上、下底梁翻转牛腿8、7搁置在井道混凝土墙体1与楼板3上,当需要进行施工作业时,作业人员将砌块、砂浆等材料放置在下操作平台上,当材料用完或作业高度超过作业人员所能施工的高度时,通过无线遥控装置14控制上操作平台的电动丝杆升降机6-2丝杆的伸出与收回,实现下操作平台的上下,同时由于丝杆升降机具有自锁功能,所以可以实现下操作平台在任意位置的悬停。在下操作平台处于运功过程中时,为安全起见,作业人员应该离开操作平台。
64.本发明的自提升可悬停式施工操作平台的施工方法一实施例中,步骤s6,之后还包括:
65.步骤s7,当需要进行提升作业时,如图9所示,将下操作平台通过下底梁翻转牛腿7搁置在电梯井道的下楼层的墙体和楼板的牛腿搁置孔内,将上底梁封闭闸板12和翻转出的上底梁翻转牛腿8收回,然后通过无线遥控装置14将上操作平台的上电动丝杆升降机6-2向上收回,并将下操作平台的下电动丝杆升降机6-1向上伸出,上电动丝杆升降机6-2和下电动丝杆升降机6-1通过同步控制系统13实现丝杆的同步伸出与同步收回,且速率相同;
66.步骤s8,如图10所示,当上操作平台的上电动丝杆升降机6-2的丝杆收回到最底部时,此时关闭上操作平台的上电动丝杆升降机6-2,将下操作平台的下电动丝杆升降机6-1的丝杆继续向上伸出,带动上操作平台一起向上同步运动,直到上操作平台上升到相邻上一层,并将上操作平台翻转出的上底梁翻转牛腿8搁置在井道混凝土墙体1和混凝土楼板3上,上操作平台提升完成,然后关闭上底梁封闭闸板12,如图11所示;
67.步骤s9,打开下底梁封闭闸板11,通过无线遥控装置14同时启动上操作平台的上电动丝杆升降机6-2和下操作平台的下电动丝杆升降机6-1,将上操作平台的上电动丝杆升降机6-2的丝杆向下伸出,将下操作平台的下电动丝杆升降机6-1的丝杆向下收回,直到下操作平台的下电动丝杆升降机6-1的丝杆收回至最底部,此时关闭下操作平台的下电动丝杆升降机6-1,如图12所示;
68.步骤s10,通过无线遥控装置启动上操作平台的上电动丝杆升降机6-2使其丝杆向上收回,并带动下操作平台一起向上运动,直到下操作平台上升到相邻上一楼层,上操作平台通过翻转下底梁翻转牛腿7在井道混凝土墙体1和楼板3上,最后关闭下底梁封闭闸板,如图13所示,则整个过程完成一次自提升可悬浮式施工操作平台的提升。
69.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
70.显然,本领域的技术人员可以对发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包括这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1