连续等跨框架结构肋型楼板水平滑移模板装置及施工方法与流程
本发明属于施工设备领域,具体涉及一种连续等跨框架结构肋型楼板水平滑移模板装置及施工方法。
背景技术:
1、混凝土结构物流厂房工程存在单层层高高、面积大等特点,目前主要施工方法包括传统模板脚手架支撑方式、滑移施工方法、装配式施工方法等,这些方法均存在一定问题。传统模板脚手架支撑方式,会消耗大量的周转材料,并增加转运工作量;滑移施工方法目前主要分为地面式滑移或轨道滑移平台,其中地面式滑移仍会消耗较多脚手架,轨道滑移平台滑移过程存在较多的支模架搭拆;如采用装配式结构形式,存在吊装效率低下、吊装机械投入大、安全风险高、梁柱节点部位安装困难等问题。
技术实现思路
1、本发明的目的在于解决现有技术中混凝土结构物流厂房工程施工过程中滑移施工困难、支模架搭拆周转材料和人工消耗较大、施工效率低的问题,并提供一种连续等跨框架结构肋型楼板水平滑移模板装置及施工方法。
2、本发明所采用的具体技术方案如下:
3、第一方面,本发明提供了一种连续等跨框架结构肋型楼板水平滑移模板装置,其包括滑移底座和肋型楼板支模平台;
4、所述滑移底座包括第一支撑组件、轨道梁、顶升机构和第二支撑组件;其中第一支撑组件成对布置,每一对第一支撑组件能够分别安装在施工区域两侧的已浇筑混凝土柱上,共同构成安装轨道梁的支撑结构;两条所述轨道梁分别平行架设于施工区域两侧的所述支撑结构上;每一条轨道梁上分别安装至少两个所述顶升机构,且顶升机构底部具有与轨道梁配合的滑移组件,且滑移组件能够控制顶升机构沿轨道梁滑动行走和锁紧限位;每个所述顶升机构的位移输出端各自穿过一个独立的第二支撑组件,所述第二支撑组件能够以可拆卸的形式固定安装在已浇筑混凝土柱上,顶升机构的位移输出端和第二支撑组件均能够支撑上方的所述肋型楼板支模平台;
5、所述肋型楼板支模平台底部通过滑移底座中的多个顶升机构进行同步的升降控制和沿轨道梁方向的水平位移。
6、作为上述第一方面的优选,所述肋型楼板支模平台包括主梁、次梁、竖杆、主楞和次楞;所述主梁有两条,分别平行布置于两条轨道梁的上方,每条主梁底部支撑于下方的顶升机构的位移输出端和第二支撑组件上;两条主梁之间搁置并固定有多条次梁,每条次梁上水平架设一条次楞,且主楞通过多条竖杆支撑于次梁上;所有次楞间隔搁置于主楞上,形成模板的放置平面;每条次梁中部的底部垂直设置有高度可调的辅助支撑,在肋型楼板浇筑过程中所述辅助支撑支顶于地面上,将次梁受到的部分荷载传递至地面。
7、作为上述第一方面的优选,所述辅助支撑由固定支撑柱和可调底座连接而成,固定支撑柱的顶部连接次梁,底部连接可调底座,可调底座在肋型楼板支模平台从浇筑高度下降之前需要拆除或缩短高度,避免产生干涉。
8、作为上述第一方面的优选,所述次梁与竖杆的连接位置设有连系杆,通过连系杆将不同的次梁与竖杆一体联结。
9、作为上述第一方面的优选,所述主楞与竖杆的连接位置设有连系杆,通过连系杆将不同的主楞与竖杆一体联结。
10、作为上述第一方面的优选,所述轨道梁、主梁、次梁、竖杆均采用h型钢。
11、7作为上述第一方面的优选,所述顶升机构采用液压千斤顶。
12、作为上述第一方面的优选,所述第一支撑组件和第二支撑组件均采用三脚架,且三脚架通过锚栓固定在已浇筑混凝土柱的侧面。
13、作为上述第一方面的优选,所述顶升机构底部与轨道梁配合的滑移组件包括抱箍、导轮及锁紧件,抱箍安装于顶升机构底部,抱箍环绕式扣装在所述轨道梁上翼缘用于防止脱轨,导轮内置于抱箍中且能够在轨道梁上表面进行滑动,抱箍上方的顶升机构受到的荷载通过导轮传递至轨道梁;所述锁紧件能够限制抱箍与轨道梁的相对移动。
14、第二方面,本发明提供了一种利用第一方面任一所述连续等跨框架结构肋型楼板水平滑移模板装置的施工方法,其包括:
15、s1、针对连续等跨框架结构中的肋型楼板施工区域,预先在施工区域两侧浇筑混凝土柱并养护成型,形成两排已浇筑混凝土柱;
16、s2、在各条已浇筑混凝土柱的内侧悬空安装第一支撑组件,并保持每排已浇筑混凝土柱上的第一支撑组件标高相同,在每排已浇筑混凝土柱的第一支撑组件上架设并固定连续的轨道梁;
17、s3、在每条轨道梁上安装至少两个顶升机构,将顶升机构在轨道梁上的位置调节至位于第一个施工子区域内,每个顶升机构分别在轨道梁上锁定在一根已浇筑混凝土柱所在位置并将顶升机构顶部的第二支撑组件固定在对应的这根已浇筑混凝土柱上;然后在地面上预先装配好所述肋型楼板支模平台,并将肋型楼板支模平台整体吊装并固定到由所有顶升机构的位移输出端和第二支撑组件共同构成的支撑平面上;
18、s4、在肋型楼板支模平台完成吊装固定后,在次楞上方铺设施工所需的模板,在肋型楼板支模平台的每条次梁中部下方安装辅助支撑,形成施工平台;
19、s5、调节肋型楼板支模平台中每条次梁下方辅助支撑的高度,使其底部支撑于地面上,对次梁中部形成支顶作用;然后在模板上方进行钢筋绑扎,再进行混凝土浇筑;
20、s6、待肋型楼板的混凝土养护完毕拆除梁模板后,调整每条次梁下方安装的辅助支撑,使其底部留出避免干涉肋型楼板支模平台下降的悬空高度;将第二支撑组件与所在已浇筑混凝土柱之间的连接进行拆除;
21、s7、通过控制顶升机构的位移输出端下降,从而将肋型楼板支模平台整体下降至允许平移的高度,避免平移过程中与其他结构物发生干涉;
22、s8、解除顶升机构与轨道梁之间的锁定,推动所有顶升机构沿着轨道梁同步移动,从而将肋型楼板支模平台移动至下一个施工子区域中,并在就位后重新同步控制顶升机构的位移输出端上升,从而将肋型楼板支模平台整体升高至施工所需高度,再将第二支撑组件与所对应的已浇筑混凝土柱进行连接固定,进而按照s5对下一个施工子区域进行施工。
23、本发明相对于现有技术而言,具有以下有益效果:
24、本发明针对高层高、面积大的框架结构,主要用于连续等跨框架结构肋型楼板的施工,其整体的模板钢平台可直接在工厂或现场地面进行组装,再直接进行吊装及模板铺设,节省了脚手架模板搭设时间,并可通过滑移方式完成材料的周转运输,极大提升了施工效率。
技术特征:
1.一种连续等跨框架结构肋型楼板水平滑移模板装置,其特征在于,包括滑移底座和肋型楼板支模平台;
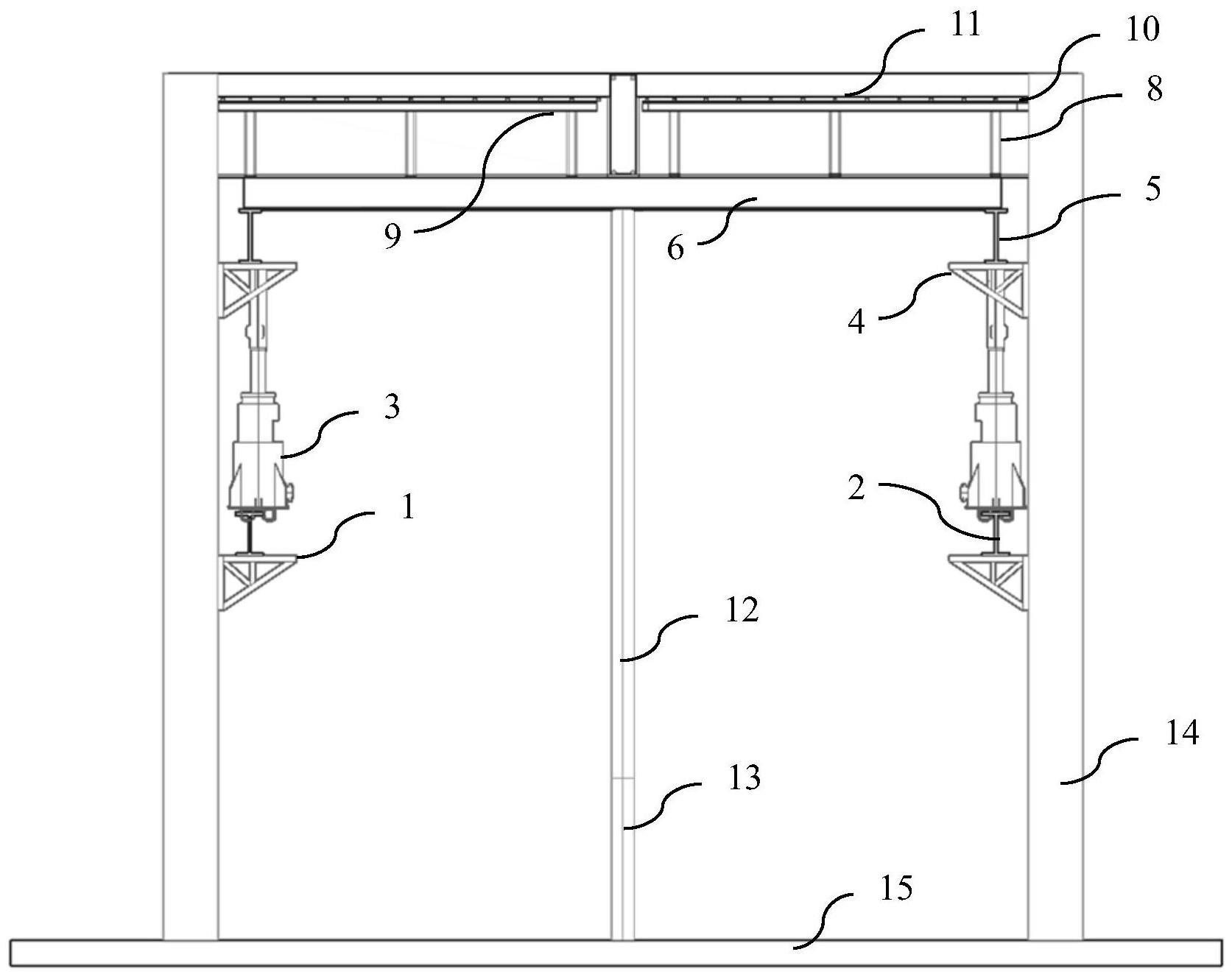
2.如权利要求1所述的连续等跨框架结构肋型楼板水平滑移模板装置,其特征在于,所述肋型楼板支模平台包括主梁(5)、次梁(6)、竖杆(8)、主楞(9)和次楞(10);所述主梁(5)有两条,分别平行布置于两条轨道梁(2)的上方,每条主梁(5)底部支撑于下方的顶升机构(3)的位移输出端和第二支撑组件(4)上;两条主梁(5)之间搁置并固定有多条次梁(6),每条次梁(6)上水平架设一条次楞(10),且主楞(9)通过多条竖杆(8)支撑于次梁(6)上;所有次楞(10)间隔搁置于主楞(9)上,形成模板(11)的放置平面;每条次梁(6)中部的底部垂直设置有高度可调的辅助支撑,在肋型楼板浇筑过程中所述辅助支撑支顶于地面上,将次梁(6)受到的部分荷载传递至地面。
3.如权利要求2所述的连续等跨框架结构肋型楼板水平滑移模板装置,其特征在于,所述辅助支撑由固定支撑柱(12)和可调底座(13)连接而成,固定支撑柱(12)的顶部连接次梁(6),底部连接可调底座(13),可调底座(13)在肋型楼板支模平台从浇筑高度下降之前需要拆除或缩短高度,避免产生干涉。
4.如权利要求2所述的连续等跨框架结构肋型楼板水平滑移模板装置,其特征在于,所述次梁(6)与竖杆(8)的连接位置设有连系杆(7),通过连系杆(7)将不同的次梁(6)与竖杆(8)一体联结。
5.如权利要求2所述的连续等跨框架结构肋型楼板水平滑移模板装置,其特征在于,所述主楞(9)与竖杆(8)的连接位置设有连系杆(7),通过连系杆(7)将不同的主楞(9)与竖杆(8)一体联结。
6.如权利要求2所述的连续等跨框架结构肋型楼板水平滑移模板装置,其特征在于,所述轨道梁(2)、主梁(5)、次梁(6)、竖杆(8)均采用h型钢。
7.如权利要求1所述的连续等跨框架结构肋型楼板水平滑移模板装置,其特征在于,所述顶升机构(3)采用液压千斤顶。
8.如权利要求1所述的连续等跨框架结构肋型楼板水平滑移模板装置,其特征在于,所述第一支撑组件(1)和第二支撑组件(4)均采用三脚架,且三脚架通过锚栓固定在已浇筑混凝土柱(14)的侧面。
9.如权利要求1所述的连续等跨框架结构肋型楼板水平滑移模板装置,其特征在于,所述顶升机构(3)底部与轨道梁(2)配合的滑移组件包括抱箍、导轮及锁紧件,抱箍安装于顶升机构(3)底部,抱箍环绕式扣装在所述轨道梁(2)上翼缘用于防止脱轨,导轮内置于抱箍中且能够在轨道梁(2)上表面进行滑动,抱箍上方的顶升机构(3)受到的荷载通过导轮传递至轨道梁(2);所述锁紧件能够限制抱箍与轨道梁(2)的相对移动。
10.一种利用如权利要求1~9任一所述连续等跨框架结构肋型楼板水平滑移模板装置的施工方法,其特征在于,包括:
技术总结
本发明公开了一种连续等跨框架结构肋型楼板水平滑移模板装置及施工方法,属于施工设备领域。本发明提供的用于连续等跨框架结构水平滑移装置,其通过滑移底座将荷载传递至已浇筑混凝土柱上从而形成对平台的支撑,在地面完成平台组装后,可将平台直接吊装至滑移底座上完成肋型楼板支模工作。而且本发明在对应范围施工完成后,可通过千斤顶等顶升设备的下降、轨道滑移、升起等操作实现位置转换,节省了大量的施工时间,具有良好的经济效益。
技术研发人员:尤克泉,王理军,岳媛琦,叶云磊,何骏炜
受保护的技术使用者:中天建设集团有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!