餐具清洗机
1.本发明涉及用于清洗餐具等被清洗物的餐具清洗机。
背景技术:
2.提供一种被组装于整体厨房的橱柜等的餐具清洗机(例如,参照专利文献1)。专利文献1中记载的餐具清洗干燥机被构成为:在清洗槽的上表面设有开闭门,从上表面的开闭门进行餐具的取出放入。另外,2层的清洗筐被构成为通过餐具筐升降单元在清洗槽内升降。
3.[在先技术文献]
[0004]
[专利文献]
[0005]
专利文献1:日本特开平8-112231号公报
技术实现要素:
[0006]
[发明要解决的课题]
[0007]
如果增多可收纳于餐具清洗机的餐具的个数,则能够一次清洗较多的餐具,因此能够提高使用者的便利性。但是,如果餐具清洗机中收纳多个餐具,则餐具彼此的间隔变窄,因此难以将餐具取出放入。
[0008]
本公开提供一种用于提高餐具清洗机的便利性的技术。
[0009]
[用于解决技术课题的技术方案]
[0010]
本公开的餐具清洗机包括:具有开口部的清洗槽;被收纳于清洗槽内,载置被清洗物的筐;使筐移动的移动部;设于筐,支承被载置于筐的被清洗物的多个支承部;以及在通过移动部将筐移动时,使支承部间的间隔变化的间隔变更部。
[0011]
此外,以上构成要素的任意组合、以及将本发明的表现在方法、装置、系统、记录介质、计算机程序等之间进行转换的方案作为本发明的方案也是有效的。
[0012]
[发明效果]
[0013]
根据本公开,能够提高餐具清洗机的便利性。
附图说明
[0014]
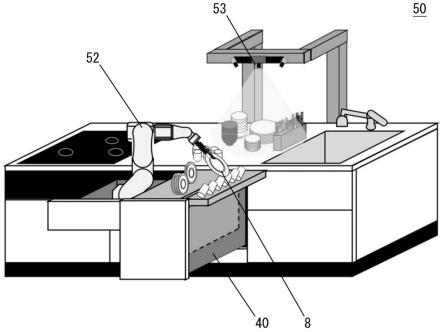
图1是表示设置有实施方式1的餐具清洗机的整体厨房的外观的图。
[0015]
图2是概略地表示实施方式1的餐具清洗机的剖面的图。
[0016]
图3是概略地表示实施方式1的餐具清洗机的剖面的图。
[0017]
图4a是表示实施方式1的餐具清洗机的筐的示例的图。
[0018]
图4b是表示实施方式1的餐具清洗机的筐的示例的图。
[0019]
图4c是表示实施方式1的餐具清洗机的筐的示例的图。
[0020]
图5a是表示多个支承部间的间隔被变更的情况的图。
[0021]
图5b是表示多个支承部间的间隔被变更的情况的图。
[0022]
图6是表示多个支承部间的间隔被扩大的状态的图。
[0023]
图7a是表示间隔变更部的构造的图。
[0024]
图7b是表示间隔变更部的构造的图。
[0025]
图8是表示用于控制实施方式1的餐具清洗机的控制部的构成的图。
具体实施方式
[0026]
以下,参照附图对实施方式进行详细说明。但是,有时省略不必要的详细说明。例如,有时省略已熟知的事项的详细说明,或省略对于实质上相同的构成的重复说明。
[0027]
此外,附图及以下说明,是为了使本领域技术人员充分理解本公开而提供的,并非意图通过这些内容来限定权利要求书所记载的主题。
[0028]
(实施方式1)
[0029]
以下,使用图1~8来说明实施方式1。
[0030]
实施方式1的餐具清洗机具有在将餐具等被清洗物取出放入时,扩大被清洗物彼此的间隔的机构。由此,由于能够容易地进行餐具等被清洗物的取出放入,因此能够提高使用者的便利性。另外,在将被清洗物收纳于餐具清洗机并进行清洗时,缩小被清洗物彼此的间隔。由此,能够增多可收纳于餐具清洗机的被清洗物的个数,因此能够一次集中清洗较多的被清洗物。
[0031]
[1-1.构成]
[0032]
图1表示设置有实施方式1的餐具清洗机的整体厨房的外观。餐具清洗机40被收纳于整体厨房50的内部。在整体厨房50中设有机器人手臂52和照相机53。机器人手臂52基于由照相机53拍摄的图像,由未图示的控制装置进行控制。机器人手臂52将被放置于整体厨房50的工作台或水槽上的被清洗物8自动地载置于餐具清洗机40的内部。另外,机器人手臂52将被载置于餐具清洗机40内的被清洗物8自动地取出。机器人手臂52也可以被设置于餐具清洗机40。
[0033]
图2和图3概略地表示实施方式1的餐具清洗机的剖面。餐具清洗机40的主体1是具有前方开口部的壳体,在内部具备清洗槽2。清洗槽2通过拉出导轨等单元(未图示)被支承为能够从主体1的前方开口部向前后拉出。清洗槽2在上方具有开口部,能够从开口部取出放入餐具等被清洗物8。在清洗槽2中设置有筐14。在本图的示例中,设置有1层的筐14,但也可以设置有2层以上的筐。
[0034]
在对被清洗物8进行清洗时,经由供水阀3从外部向清洗槽2内供给水或热水。被供给到清洗槽2的清洗水从设于清洗槽2的底部的排水孔4排出后,通过与排水孔4连通的清洗泵5从清洗喷嘴7向被清洗物8喷射,并在清洗槽2的内部循环。在清洗喷嘴7与清洗槽2的底部之间,设有清洗水加热用的加热器9。在排水孔4设有用于捕集残渣的残渣过滤器6。控制部12控制供水阀3和清洗泵5等电气部件。
[0035]
筐14被构成为在清洗槽2被从主体1拉出的状态下,能够通过升降单元进行升降。升降单元包括被固定于清洗槽2的底部的固定板和x字形状的升降连杆18、19。升降连杆18、19具有相同长度,在中央的轴17以交叉的方式设置。升降连杆18、19中的至少一者的下端枢轴支承于在固定板的左右端设置的长孔。通过升降连杆18或19的下端在长孔滑动,升降连杆18、19的上端升降,载置于升降连杆18、19上的筐14升降。图2表示筐14下降的状态,图3表
示筐14上升的状态。作为升降单元,也可以使用滚珠丝杠或带、气缸这样的致动器来使筐14升降。
[0036]
筐14也可以被设为能够自动地升降。在这种情况下,升降单元包括用于使升降连杆18、19升降的电动机等驱动单元和用于控制驱动单元的控制部。控制部可以根据由使用者进行的按钮操作等使筐14升降,也可以在通过传感器等检测到清洗槽2被从主体1拉出时自动地使筐14升降。筐14也可以被设为能够由使用者手动地进行升降。在这种情况下,升降单元包括用于使升降连杆18、19升降的旋转轴等升降机构和用于使升降机构进行动作的手柄等操作单元。升降机构也可以是在清洗槽2被从主体1拉出时通过弹簧等使升降连杆18、19升降的机构。
[0037]
图4a、图4b以及图4c表示实施方式1的餐具清洗机40的筐14的示例。图4a表示支承被载置于筐14的被清洗物8的多个支承部41。图4b表示使多个支承部41之间的间隔变化的间隔变更部42。图4c表示保持支承部41、间隔变更部42以及被清洗物8的载荷的载荷保持部43。间隔变更部42具有能够在水平方向上伸缩的构造,构成为多个支承部41间的间隔与间隔变更部42的伸缩联动地增减。通过将构成间隔变更部42的构件大多设于筐14的侧面,能够使被间隔变更部42的构成封堵的底面侧的面积减少,因此能够从清洗喷嘴7高效地向被清洗物8喷射清洗水。此外,间隔变更部42使多个支承部41的水平方向的间隔变化,因此可以使多个支承部41在水平方向上移动,也可以在斜上下方向上移动。也就是,多个支承部41的移动方向具有水平方向的成分即可。另外,间隔变更部42可以使多个支承部41的水平方向的间隔变化,也可以使垂直方向的间隔变化,也可以使倾斜方向的间隔变化。
[0038]
图5a和图5b表示多个支承部41间的间隔被变更的情况。图5a表示筐14被收纳于清洗槽2的内部且被清洗物8被清洗时,多个支承部41间的间隔收缩的状态。在该收缩时,相邻的支承部41彼此的间隔为清洗水进入相邻的被清洗物8彼此的间隙的程度即可。图5b表示筐14通过升降单元上升时,多个支承部41间的间隔扩大的状态。在该展开时,相邻的支承部41彼此的间隔为使用者的手指或机器人手臂52的指部容易进入相邻的被清洗物8彼此的间隙的程度即可。由此,在将被清洗物8手动地取出放入的情况下,在通过机器人手臂52自动地取出放入的情况下,均能够容易地进行取出放入。另外,能够抑制在取出放入被清洗物8时与其他被清洗物8接触而被清洗物8破损或污染。
[0039]
图6表示多个支承部41间的间隔被扩大的状态。间隔变更部42在筐14通过升降单元上升时,扩大支承部41间的间隔。如图6所示,多个支承部41的至少一部分也可以从清洗槽2的上方观察向清洗槽2的开口部的外部移动。由此,能够在整体厨房50的工作台等之间容易地取出放入被清洗物8。
[0040]
图7a和图7b表示间隔变更部42的构造。本实施方式的间隔变更部42具有伸缩机构,该伸缩机构将具有槽孔45和滑块46的板44与具有槽孔48和滑块49的板47交错地连接。板44b的滑块46b在板47b的槽孔48b中滑动。板47c的滑块49c在板44b的槽孔45b中滑动。在图7a所示的最大收缩时,板47的滑块49位于板44的槽孔45的最左处,板44的滑块46位于板47的槽孔48的最左处。在图7b所示的最大展开时,板47的滑块49位于板44的槽孔45的最右侧,板44的滑块46位于板47的槽孔48的最右侧。
[0041]
间隔变更部42也可以是与基于升降单元的升降动作联动从而变更支承部41间的间隔的机构。间隔变更部42也可以与升降动作联动而自动地变更支承部41间的间隔。在这
种情况下,间隔变更部42也可以包括用于使支承部41移动的电动机等驱动单元和用于控制驱动单元的控制部。
[0042]
间隔变更部42也可以同时变更多个支承部41的所有间隔。由此,能够缩短作业时间。间隔变更部42也可以分别变更多个支承部41的一部分。由此,由于能够仅变更取出放入被清洗物8所需要的区域的支承部41,因此能够抑制作业时的占有面积。
[0043]
图8表示用于控制实施方式1的餐具清洗机的控制部的构成。控制部12通过微型计算机、微型控制器、集成电路等硬件实现。本附图表示升降单元和间隔变更部42中的至少一者被自动控制的情况下的控制部12的构成。
[0044]
控制部12包括工序控制部23、驱动控制部24以及存储器25。这些构成在硬件上通过任意的计算机的cpu、存储器、其他lsi等实现,在软件上通过下载到存储器的程序等实现,在此描绘通过它们的协作而实现的功能模块。因此,本领域技术人员应该理解这些功能模块可以仅为硬件或为硬件与软件的组合等,能够以各种形式实现。
[0045]
工序控制部23控制基于餐具清洗机40的清洗运转。工序控制部23从由设于餐具清洗机40的主体1的按钮或开关等构成的操作部22接受基于使用者的指示,并按照指示控制清洗运转。工序控制部23可以连续地执行清洗工序、漂洗工序以及干燥工序,也可以仅执行任意一个工序,也可以以任意的顺序执行任意2个以上的工序的组合。
[0046]
驱动控制部24控制用于使筐14升降的升降单元。驱动控制部24与基于升降单元的筐14的升降动作联动,通过间隔变更部42来变更支承部41的间隔。驱动控制部24也可以在通过升降单元使筐14升降的同时变更支承部41的间隔,也可以在筐14移动至规定位置时变更支承部41的间隔。例如,在被清洗物8的至少一部分被移动到清洗槽2的开口部的外部的情况下,驱动控制部24也可以在筐14的底面被移动至比清洗槽2的开口部高的位置时,使支承部41的间隔扩大。另外,在被清洗物8的至少一部分被移动到整体厨房50的工作台上的情况下,驱动控制部24也可以在筐14的底面被移动至比工作台高的位置时,使支承部41的间隔扩大。
[0047]
使支承部41移动的方向、量、时刻、以及移动哪一个支承部41等,也可以设为可由使用者进行设定。在这种情况下,经由操作部22由使用者设定的内容被存储于存储器25。驱动控制部24控制升降单元而使筐14升降时,读取在存储器25中存储的设定内容,按照设定内容控制间隔变更部42,使支承部41的间隔变更。
[0048]
使支承部41移动的方向、量、时刻、以及移动哪一个支承部41等,也可以根据被清洗物8彼此的间隔或载置状态等,由驱动控制部24确定。被清洗物8彼此的间隔或载置状态等,也可以使用照相机或传感器等进行检测。驱动控制部24在被清洗物8彼此的间隔比以标准的人的手指或机器人手臂52的指部的尺寸为基准预先设定的阈值狭窄的情况下,也可以以使被清洗物8彼此的间隔比阈值大的方式使支承部41移动。驱动控制部24在被清洗物8彼此的间隔比阈值大的情况下,也可以使支承部41不移动。
[0049]
[1-2.动作]
[0050]
对于如上述构成的餐具清洗机40,以下对其动作、作用进行说明。
[0051]
在使用者将清洗槽2从餐具清洗机40的主体1向前方拉出,并将筐14向上方移动时,与其联动,间隔变更部42扩大支承部41的间隔。在使用者或机器人手臂52在筐14中载置被清洗物8,并将筐14向下方移动时,与其联动,间隔变更部42缩小支承部41的间隔。使用者
向清洗槽2内投入洗涤剂,将清洗槽2收纳于主体1并开始清洗。
[0052]
控制部12打开供水阀3向清洗槽2内供给水或热水。被供给到清洗槽2内的清洗水通过残渣过滤器6而从排水孔4被清洗泵5吸入,通过清洗泵5被供给到设于清洗槽2的内底部的清洗喷嘴7。从清洗喷嘴7喷射的清洗水,在清洗了被清洗物8后再次返回排水孔4这样的路径中循环。此时,从被清洗物8脱落的残渣等,与清洗水一起流入残渣过滤器6,不能通过该残渣过滤器6的大小的残渣被残渣过滤器6捕集。
[0053]
在清洗后取出被清洗物8时,在使用者将清洗槽2从餐具清洗机的主体1向前方拉出,并将筐14向上方移动时,与其联动,间隔变更部42扩大支承部41的间隔。在使用者从筐14取出被清洗物8,并将筐14向下方移动时,与其联动,间隔变更部42缩小支承部41的间隔。
[0054]
[1-3.效果等]
[0055]
如上所述,在本实施方式中,餐具清洗机40包括:具有开口部的清洗槽2;被收纳于清洗槽2内,载置被清洗物8的筐14;使筐14升降的升降单元;设于筐14,支承被载置于筐14的被清洗物8的多个支承部41;以及在通过升降单元将筐14升降时,使支承部41间的间隔变化的间隔变更部42。由此,由于能够容易地进行被清洗物8的取出放入,因此能够提高使用者的便利性。
[0056]
另外,在本实施方式中,开口部设于清洗槽2的上方,升降单元使筐14在上下方向上升降,间隔变更部42与基于升降单元的筐14的升降动作联动,使支承部41在水平方向或上下方向上移动。由此,由于能够容易地进行被清洗物8的取出放入,因此能够提高使用者的便利性。
[0057]
另外,在本实施方式中,多个支承部41的至少一部分通过间隔变更部42从清洗槽2的上方观察向清洗槽2的外部移动。由此,由于能够容易地进行被清洗物8的取出放入,因此能够提高使用者的便利性。
[0058]
另外,在本实施方式中,餐具清洗机包括对升降单元和间隔变更部42中的至少一个进行控制的控制部12,控制部12使筐14通过升降单元自动地升降,或使支承部41通过间隔变更部42自动地移动。由此,由于能够容易地进行被清洗物8的取出放入,因此能够提高使用者的便利性。
[0059]
另外,在本实施方式中,升降单元使筐14手动地移动,或间隔变更部42使支承部41手动地移动。由此,由于能够容易地进行被清洗物8的取出放入,因此能够提高使用者的便利性。
[0060]
另外,在本实施方式中,清洗槽2被设为能够从在前方具有前方开口部的壳体前后地进行取出放入。由此,由于能够容易地进行被清洗物8的取出放入,因此能够提高使用者的便利性。
[0061]
另外,在本实施方式中,清洗槽2的开闭门设于清洗槽2的上方。由此,由于能够容易地进行被清洗物8的取出放入,因此能够提高使用者的便利性。
[0062]
(其他实施方式)
[0063]
如上所述,作为本技术中公开的技术的例示,对实施方式1进行了说明。但是,本公开的技术并不限定于此,也能够应用于进行了变更,置换,附加,省略等的实施方式。另外,也能够将上述实施方式1中说明的各构成要素进行组合,而形成新的实施方式。
[0064]
因此,以下,对其他实施方式进行例示。
[0065]
在实施方式1中,示出了在上方具有开口部的清洗槽2被设为能够从在前方具有开口部的主体1前后地取出放入的示例,但在其他示例中,清洗槽2的开闭门也可以设于清洗槽2的上方。在这种情况下,清洗槽2可以被设为能够从主体1前后地取出放入,也可以固定地收纳于主体1的内部。
[0066]
在实施方式1中,示出了筐14通过升降单元进行升降的示例,但在其他示例中,筐14可以被设为能够在水平方向上移动,也可以被设为能够在水平方向和垂直方向上移动。
[0067]
在实施方式中,示出了餐具清洗机40被收纳于整体厨房50的内部的示例,但在其他示例中,餐具清洗机40也可以构成为独立的装置。
[0068]
此外,上述实施方式仅用于例示本公开的技术,因此在不脱离权利要求的范围或与其均等的范围内,能够进行各种变更、置换、附加、省略等。
[0069]
[工业可利用性]
[0070]
本发明能够利用于用于清洗餐具等被清洗物的餐具清洗机。
[0071]
[附图标记说明]
[0072]
1主体,2清洗槽,3供水阀,4排水孔,5清洗泵,6过滤器,7清洗喷嘴,8被清洗物,9加热器,12控制部,17轴,18升降连杆,22操作部,23工序控制部,24驱动控制部,25存储器,40餐具清洗机,41支承部,42间隔变更部,43载荷保持部,44板,45槽孔,46滑块,47板,48槽孔,49滑块,50整体厨房,52机器人手臂。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1