一种多功能家居机器人
1.本发明涉及智能家居领域,具体涉及到一种多功能家居机器人。
背景技术:
2.现如今,德国提出工业4.0,中国提出智能制造2025计划,美国提出工业互联网,其实三者只是名字不同而已,最终核心直指智能制造;
3.互联:其核心是连接,要把设备、生产线、工厂、供应商、产品和客户紧密地联系在一起;数据:它连接和产品数据、设备数据、研发数据、工业链数据、运营数据、管理数据、销售数据、消费者数据;集成:工业4.0将无处不在的传感器、嵌入式中端系统、智能控制系统、通信设施通过cps形成一个智能网络;通过这个智能网络,使人与人、人与机器、机器与机器、以及服务与服务之间,能够形成一个互联,从而实现横向、纵向和端到端的高度集成,创新:智能制造的实施过程是制造业创新发展的过程,制造技术、产品、模式、业态、组织等方面的创新,将会层出不穷,从技术创新到产品创新,到模式创新,再到液态创新,最后到组织创新;
4.通过上面四大特性,我们不难看出,我们正在用机器去取代人的部分工作为趋势进行创新,因此,未来机器人领域将是新一代产业核心,类似智能冰箱,空调,扫地机器人,智能温控,智能管家等等智能家电已经比较普遍;
5.扫地机器人的发展历史有近20年了,而国内用户是近几年才慢慢开始接触到这类产品,随着技术不断的革新,扫地机器人从傻瓜式随机式到现在的规划式,技术不断的革新,功能也越来越强大;1997年第一代扫地机器人诞生于瑞典伊莱克斯三叶虫专业家电制造商,三叶虫采用位于机器后部的单滚刷及无边刷设计,拥有无电自动回充防跌落的功能,它的反应速度、运算速度以及机器行进速度都比较慢,导致清扫的效率低下,到了2002年,美国科技公司irobot推出了roomba扫地机器人,2010年逻辑的创始人贾科莫马里尼,在美国加州硅谷推出了一款使用激光雷达测距的扫地机器人——neato扫地机器人,其采用规划式清扫,激光扫描定位等,效率非常之高;
6.国内的话,相比来说产业较为集中,科沃斯是中国扫地机器人的龙头企业,2019年科沃斯扫地机器人市场占有率达到49.4%;其次是米家扫地机器人,市场占有率为12.0%;排在第三位的是石头扫地机器人,市场占有率为11.1%;
7.但就目前来说,国内扫地清洁机器人的仍存在较大的缺陷:1.缺少加湿器,导致效率不高,;2.扫地机器人多以仿照国外扁平机构居多,但技术上存在不足,智能清理小型垃圾,无法处理易拉罐或者更大的物件;3.只能进行平地运动,而且有时候需要人为辅助完成一些清理,避障上做的也不是很好,更不能做到爬楼进行清理,有时候一些小高度也会使它出现故障;4.垃圾不能有效分类,后期要自己重新处理;5.有些死角地方清理效率质量不高,吸尘器不能做到这些;6.很多地方体现不到很好的人机交互体验,使用户使用起来会出现很多问题。
技术实现要素:
8.为了克服上述现有技术中的缺陷,本发明提供了一种多功能家居机器人,有效解决垃圾处理,死角清理,清扫爬楼,垃圾初步分类,智能避障,优化人机交互体验等问题。
9.技术方案
10.一种多功能家居机器人,包括一个顶板与四个侧板,所述顶板上固设有电子屏,所述侧板上连接有移动模块,所述侧板上还设置有四个超声波hc-sr传感器与红外传感器,所述顶板的中部还设置有用于垃圾识别的人机交互盒与透声栅栏,所述人机交互盒内设置有交互盒高清摄像头与图像处理摄像头,所述透声栅栏的下侧固设有音响,前后两个所述侧板之间设置有两根丝杆,所述丝杆上螺纹连接有两块对称的固定板,右侧的所述固定板上固定连接有一个吸尘器,左侧的所述固定板上固定连接有支撑板,所述支撑板之间设置有传送带,所述传送带上侧抵接有上端铰接于所述支撑板之间的隔板一与隔板二,所述隔板一与所述隔板二通过电机带动进行翻转,从而形成对所述传送带上垃圾的隔断与放行效果,所述隔板一与所述隔板二上设置有识别高清摄像头,所述传送带的左侧设置有其他垃圾收集仓、厨余垃圾收集仓、有害垃圾收集仓、可回收垃圾收集仓,所述传送带的左侧还设置有用于控制电机的电机控制模块与超声波模块,所述传送带的下侧还设置有拖布模块,还包括有用于垃圾识别的垃圾识别程序。
11.进一步的,所述移动模块包括固设于所述侧板上的动力电机,所述动力电机上设置有编码器,所述动力电机上动力连接有传动轴,所述传动轴上套装有管轴,所述管轴与所述侧板转动连接,所述传动轴远离所述动力电机的一端贯穿并转动连接有旋转臂,所述旋转臂上转动连接有三个环形阵列的过渡轮,所述过渡轮啮合连接有一个与所述传动轴固定连接的中心轮,所述过渡轮的转轴转动连接有一个轮毂,所述轮毂上转动连接有三根联轴,下侧两个所述联轴上固定连接有全向车轮、与所述过渡轮啮合连接的驱动轮,上侧一个所述联轴上固定连接有普通车轮、与所述过渡轮啮合连接的所述驱动轮。
12.进一步的,所述全向车轮包括轮轴、平键、全向滚轮、滚动连接件、全向轮底盘、螺母。
13.进一步的,所述拖布模块包括两根连接杆,所述连接杆的两端固定连接有限位块,所述限位块通过固定杆固定连接于前后两个所述侧板之间,所述连接杆上滑动连接有两个拖布固定块,所述拖布固定块上固定有拖布,两个所述拖布上各固定连接有一个中间固定块,所述中间固定块上铰接有侧连杆,两个所述侧连杆之间铰接有一个中间连杆,所述中间连杆的上侧设置有一个偏心轮,所述偏心轮通过固定轴杆固定连接于所述侧板,所述偏心轮通过皮带带连接有带轮电机,所述带轮电机通过固定板固定连接于所述侧板。
14.进一步的,所述电机控制模块包括蓝牙连接模块、驱动大电机、stm双核a芯片、信号提示灯,所述电机控制模块用于控制所述吸尘器等需要电源和电机驱动的部件。
15.进一步的,所述吸尘器包括吸尘器进口、吸尘器出口、垃圾收集仓和滤网,所述滤网用于过滤掉大体积的垃圾,所述垃圾收集仓用于储存小体积的垃圾。
16.进一步的,所述垃圾识别程序包括训练集,主要用到神经网络识别技术和机器学习技术,通过预先输入大量的关于可回收垃圾、不可回收垃圾、其他垃圾、有害垃圾的具体图片作为资料,并通过图像的比对来确认垃圾的类别,同时进行大量的数据测试以形成训练集,之后不断的训练来提升识别的准确度。
17.进一步的,所述滤网处设置有一块用于暂时存放大体积垃圾的单侧铰接的转板,所述转板的另一侧连接有气缸,所述气缸能够控制所述转板的倾斜角度,从而将转板上暂存的垃圾分批次倒至所述传送带。
18.进一步的,所述音响包括喇叭孔、stm32-f105芯片、蓝牙模块。
19.进一步的,垃圾在所述传送带上移动时,通过所述隔板一与所述隔板二25开合的时间差控制,尽可能控制使得每次只分类识别一个垃圾。
20.进一步的,所述顶板上还设置有二维码,用户可以扫所述二维码来进行信息的实时查询和实时操作指令的发布。
21.进一步的,所述音响还包括有其他的配件,用于配合完成语音播报、遭遇提示、音乐播放驱赶宠物和提示用户、结束开始提示音、充当蓝牙音箱、背景音乐播放等功能。
22.进一步的,所述其他垃圾收集仓、所述厨余垃圾收集仓、所述有害垃圾收集仓、所述可回收垃圾收集仓选用不易粘连垃圾的特制材料,所述传动带采用不锈钢材质。
23.进一步的,所述移动模块的行星轮式结构能够利用数学模型结合建筑楼梯标准算出的精确比例和尺寸,从而实现爬楼的目的,计算如下:根据《建筑楼梯模数协调标准》得出:所述行星轮式结构是一种前轮驱动后轮转向的轮式机构,并进行行星轮式机构参数化设计,采用麦克纳姆轮,也就是万向轮,它可以前后左右运动,比较灵活,并且采用双排的所述全向车轮,双排的所述全向车轮的所述全向滚轮之间没有死角,所述全向车轮无需润滑或现场维护与安装,是非常简单和稳定的,而且所述全向车轮的结构允许水平360度旋转。
24.进一步的,所述超声波模块可对前方半径2cm~400cm、角度100
°
以内范围进行障碍物感知和距离测量,测量精度能够达到毫米级别,所述超声波模块由声波发射部分和声波接收部分组成,当初始状态触发信号时,所述超声波hc-sr04传感器将会连续对外界发送高电平脉冲(脉冲宽度至少为10us),在发送的同时启动计时器,在捕捉到回响信号后,所述计时器得到来回的时间间隔,所述超声波hc-sr04传感器发射部分采用换能器tct40-16t向外界发射40khz的方波脉冲信号,由单片机输出端将方波脉冲信号分成两路,其中一路传输至功率放大电路进行功率放大以便使发射距离足够远,满足测距要求,另一路传输至所述换能器 tct40-16t,以声波形式发射到外界,当发射部分发射超声波,在超声波遇到障碍物后,通过障碍物表面进行发射,由接收器及时接收并转化为电信号,由于电信号较为微弱,在超声波传感器声波接收部分电路图中加入了一组两级功率放大电路,其第一级固定放大倍数20倍,第二级通过调节可变电阻r22来改变放大倍数,可改变的区间为1~20倍,故总放大倍数的区间为1~40倍,使得转化的电信号得到充足放大。
25.本发明的有益效果是:
26.解决了很多现在扫地机器人的限制,它的移动模块采用行星式轮轴设计,根据《建筑楼梯模数协调标准》计算得出的尺寸比例,可以很好地解决传统的扫地机器人不能解决复式楼层的清扫问题;还加入了拖地功能,巧妙的机械结构设计可以对一些死角和污渍更彻底地清理;周围四个方向加入了红外传感器,可以检测人和宠物,并配备音乐进行提醒;垃圾收集仓还加入了滤网,能够更好地分离大型垃圾和灰尘、头发等的小型垃圾;用不锈钢
链板传送带配合控制芯片,机器学习过的摄像头检测对大型垃圾进行初步分类;此外用户可以通过二维码,把一种多功能扫地机器人和手机、电脑等智能终端联系在一起,实时反馈清扫进度,以及设置每天清扫时间,还可以设置清扫完成后自动归位的地点;为了更好地实现人机交互功能,给用户更好的体验,还在顶部加装了电子屏,配备了图形界面,上面运用了一些能给用户带来积极情绪的图形,在运行中显示,有助于用户的情感共鸣,还有语音提示用户如何操作;在顶部装了垃圾识别人机交互盒,采用神经网络识别技术帮助用户更好地识别。
附图说明
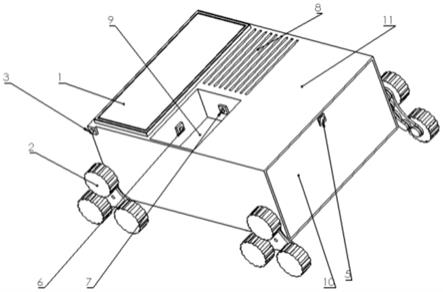
27.图1是本发明一种多功能家居机器人的整体结构示意图;
28.图2是本发明的部分内部结构的俯视图;
29.图3是电机控制模块的结构示意图;
30.图4是音响的结构示意图;
31.图5是移动模块的结构示意图;
32.图6是拖布模块的结构示意图;
33.图7是全向车轮的结构示意图;
34.图8是行星轮式结构的爬楼数学模型示意图;
35.图9是超声波模块声波接收部分的电路示意图;
36.图10是垃圾识别程序的流程框图。
37.图中:1、电子屏;2、移动模块;3、红外传感器;4、支撑板;5、超声波hc-sr04传感器;6、交互盒高清摄像头;7、图形处理摄像头;8、透声栅栏;9、人机交互盒;10、侧板; 11、顶板;12、吸尘器;15、其他垃圾收集仓;16、厨余垃圾收集仓;17、有害垃圾收集仓; 18、可回收垃圾收集仓;19、丝杆;20、固定板;22、传送带;23、隔板一;24、识别高清摄像头;25、隔板二;28、吸尘器进口;29、吸尘器出口;30、全向车轮31、驱动大电机; 32、stm32双核a7芯片;33、信号提示灯;34、蓝牙连接模块;35、喇叭孔;36、音响;38、传动轴;39、动力电机;40、编码器;41、管轴;42、旋转臂;43、中心轮;44、过渡轮; 45、驱动轮;46、轮毂;47、普通车轮;48、带轮电机;49、皮带;50、偏心轮;51、拖布; 52、连接杆;53、拖布固定块;54、限位块;55、中间固定块;56、侧连杆;57、中间连杆; 60、螺母;61、平键;62、轮轴;63、全向滚轮;64、滚动连接件;65、全向轮底盘;
具体实施方式
38.为更好地说明阐述本发明内容,下面结合附图和实施实例进行展开说明:
39.图1-图10所示,本发明公开了一种多功能家居机器人,包括一个顶板11与四个侧板10,所述顶板1上固设有电子屏1,所述侧板10上连接有移动模块2,所述侧板10上还设置有四个超声波hc-sr04传感器5与红外传感器3,所述顶板11的中部还设置有用于垃圾识别的人机交互盒9与透声栅栏8,所述人机交互盒9内设置有交互盒高清摄像头6与图像处理摄像头7,所述透声栅栏8的下侧固设有音响36,前后两个所述侧板10之间设置有两根丝杆19,所述丝杆19上螺纹连接有两块对称的固定板20,右侧的所述固定板20上固定连接有一个吸尘器12,左侧的所述固定板20上固定连接有支撑板4,所述支撑板4之间设置有传送带22,所
述传送带22上侧抵接有上端铰接于所述支撑板4之间的隔板一23与隔板二25,所述隔板一23与所述隔板二25通过电机带动进行翻转,从而形成对所述传送带22上垃圾的隔断与放行效果,所述隔板一23与所述隔板二25上设置有识别高清摄像头24,所述传送带22的左侧设置有其他垃圾收集仓15、厨余垃圾收集仓16、有害垃圾收集仓17、可回收垃圾收集仓 18,所述传送带22的左侧还设置有用于控制电机的电机控制模块与超声波模块,所述传送带 22的下侧还设置有拖布模块,还包括有用于垃圾识别的垃圾识别程序。
40.进一步的,所述移动模块2包括固设于所述侧板10上的动力电机39,所述动力电机39 上设置有编码器40,所述动力电机39上动力连接有传动轴38,所述传动轴38上套装有管轴 41,所述管轴41与所述侧板10转动连接,所述传动轴38远离所述动力电机39的一端贯穿并转动连接有旋转臂42,所述旋转臂42上转动连接有三个环形阵列的过渡轮44,所述过渡轮44啮合连接有一个与所述传动轴38固定连接的中心轮43,所述过渡轮44的转轴转动连接有一个轮毂46,所述轮毂46上转动连接有三根联轴(未示出),下侧两个所述联轴上固定连接有全向车轮30、与所述过渡轮44啮合连接的驱动轮44,上侧一个所述联轴上固定连接有普通车轮47、与所述过渡轮44啮合连接的所述驱动轮44。
41.进一步的,所述全向车轮30包括轮轴62、平键61、全向滚轮63、滚动连接件64、全向轮底盘65、螺母60。
42.进一步的,所述拖布模块包括两根连接杆52,所述连接杆52的两端固定连接有限位块 54,所述限位块54通过固定杆(未示出)固定连接于前后两个所述侧板10之间,所述连接杆52上滑动连接有两个拖布固定块53,所述拖布固定块53上固定有拖布51,两个所述拖布 51上各固定连接有一个中间固定块55,所述中间固定块55上铰接有侧连杆56,两个所述侧连杆56之间铰接有一个中间连杆57,所述中间连杆57的上侧设置有一个偏心轮50,所述偏心轮50通过固定轴杆(未示出)固定连接于所述侧板10,所述偏心轮50通过皮带49带连接有带轮电机48,所述带轮电机48通过固定板(未示出)固定连接于所述侧板10。
43.进一步的,所述电机控制模块包括蓝牙连接模块34、驱动大电机31、stm32双核a7芯片32、信号提示灯33,所述电机控制模块用于控制所述吸尘器12等需要电源和电机驱动的部件。
44.进一步的,所述吸尘器12包括吸尘器进口28、吸尘器出口29、垃圾收集仓(未示出)和滤网(未示出),所述滤网用于过滤掉大体积的垃圾,所述垃圾收集仓用于储存小体积的垃圾。
45.进一步的,所述垃圾识别程序包括训练集,主要用到神经网络识别技术和机器学习技术,通过预先输入大量的关于可回收垃圾、不可回收垃圾、其他垃圾、有害垃圾的具体图片作为资料,并通过图像的比对来确认垃圾的类别,同时进行大量的数据测试以形成训练集,之后不断的训练来提升识别的准确度。
46.进一步的,所述滤网处设置有一块用于暂时存放大体积垃圾的单侧铰接的转板(未示出),所述转板的另一侧连接有气缸,所述气缸能够控制所述转板的倾斜角度,从而将转板上暂存的垃圾分批次倒至所述传送带22。
47.进一步的,所述音响36包括喇叭孔35、stm32-f105芯片、蓝牙模块。
48.进一步的,垃圾在所述传送带22上移动时,通过所述隔板一23与所述隔板二25开合的时间差控制,尽可能控制使得每次只分类识别一个垃圾。
49.进一步的,所述顶板1上还设置有二维码,用户可以扫所述二维码来进行信息的实时查询和实时操作指令的发布。
50.进一步的,所述音响36还包括有其他的配件,用于配合完成语音播报、遭遇提示、音乐播放驱赶宠物和提示用户、结束开始提示音、充当蓝牙音箱、背景音乐播放等功能。
51.进一步的,所述其他垃圾收集仓15、所述厨余垃圾收集仓16、所述有害垃圾收集仓17、所述可回收垃圾收集仓18选用不易粘连垃圾的特制材料,所述传动带22采用不锈钢材质。
52.进一步的,所述移动模块2的行星轮式结构能够利用数学模型结合建筑楼梯标准算出的精确比例和尺寸,从而实现爬楼的目的,计算如下:根据《建筑楼梯模数协调标准》得出:所述行星轮式结构是一种前轮驱动后轮转向的轮式机构,并进行行星轮式机构参数化设计,采用麦克纳姆轮,也就是万向轮,它可以前后左右运动,比较灵活,并且采用双排的所述全向车轮30,双排的所述全向车轮30的所述全向滚轮63之间没有死角,所述全向车轮30无需润滑或现场维护与安装,是非常简单和稳定的,而且所述全向车轮30的结构允许水平360 度旋转。
53.进一步的,所述超声波模块可对前方半径2cm~400cm、角度100
°
以内范围进行障碍物感知和距离测量,测量精度能够达到毫米级别,所述超声波模块由声波发射部分和声波接收部分组成,当初始状态触发信号时,所述超声波hc-sr04传感器将会连续对外界发送高电平脉冲(脉冲宽度至少为10us),在发送的同时启动计时器,在捕捉到回响信号后,所述计时器得到来回的时间间隔,所述超声波hc-sr04传感器发射部分采用换能器tct40-16t向外界发射40khz的方波脉冲信号,由单片机输出端将方波脉冲信号分成两路,其中一路传输至功率放大电路进行功率放大以便使发射距离足够远,满足测距要求,另一路传输至所述换能器tct40-16t,以声波形式发射到外界,当发射部分发射超声波,在超声波遇到障碍物后,通过障碍物表面进行发射,由接收器及时接收并转化为电信号,由于电信号较为微弱,在超声波传感器声波接收部分电路图中加入了一组两级功率放大电路,其第一级固定放大倍数20倍,第二级通过调节可变电阻r22来改变放大倍数,可改变的区间为1~20倍,故总放大倍数的区间为1~40倍,使得转化的电信号得到充足放大。
54.具体地,当垃圾被吸尘器12吸收后,小体积的垃圾通过滤网并被储存于垃圾收集仓,而大体积的垃圾则暂存与转板上,而需要垃圾分类时,气缸启动并带动转板向下侧倾斜,进而转板上的垃圾则滑动至传送带22上,而在传送带22带动垃圾进给时,隔板二25通过快速的开合,使得少量的垃圾通过,并且尽量使得到达隔板一23与隔板二25之间的垃圾只有一个,此时识别高清摄像头24对垃圾进行拍照并通过垃圾识别程序进行识别;
55.识别完毕之后,丝杆19转动并带动传送带22移动至其他垃圾收集仓15或厨余垃圾收集仓16或有害垃圾收集仓17或可回收垃圾收集仓18之前,然后打开隔板一23并通过传送带 23实现对垃圾的投放;
56.而需要拖地功能时,启动带轮电机48,进而带轮电机48通过皮带49带动偏心轮50转动,进而中间连杆57跟随偏心轮50同步运动,进而中间连杆57拉动侧连杆56,从而带动拖
布51做来回往复的运动,结合全向车轮30的360度运动效果,实现对地面的无死角清理,而清扫的过程中,则通过超声波模块实现避障效果,同时通过音响36播放恰当的音乐实现驱赶宠物或提示人员离开的效果;
57.而动力电机39启动时,传动轴38转动并带动中心轮43转动,进而通过过渡轮44带动驱动轮45转动,进而带动全向车轮30转动,实现前进的效果,而遇到楼梯时,由于无法继续前行,则全向车轮30将被卡住而无法转动,进而在传动轴38的动力作用下,行星轮式的结构将会整体旋转,从而将普通车轮47向前翻并放置于上一层台阶上,从而逐步实现爬楼的操作。
58.电子屏1可以通过扫边上的二维码来显示一些实时的信息,同样可以扫码连接查看具体种类和监测历史记录,也可以实时改变既定的四种分类单项中的垃圾种类,可以将一种多功能扫地机器人和手机、电脑等智能终端联系在一起,实时反馈清扫进度,以及设置每天清扫时间,还可以设置清扫完成后自动归位的地点;最后电子屏1上还可以显示一些图形界面,一些有益于帮助用户建立好心情的图片,实现更好的人机交互。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1